

Лямин К.В. М 390502
М
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«Уральский федеральный университет
имени первого Президента России Б.Н. Ельцина»
Механико-машиностроительный институт
:
Реферат
Обработка зубчатых колес
Руководитель |
С.Ю.Маталасов |
Студент гр. М390502 |
К.В. Лямин |
|
|
2
Содержание.
Зубчатые передачи классифицируются по признакам, приведенным ниже. 4
Контроль зубчатых колес 7
Рис.5.Длина общей нормали. 7
Эвольвентное зацепление. 8
Технология изготовления зубчатых колёс. 8
Базирование. 9
Технологические задачи 12
Обработка заготовки зубчатых колес до нарезания зубьев. 14
Основные методы формообразования зубьев зубчатых колес 15
Отделочные виды обработки зубчатых колес. 19
Эвольвента окружности.
Геометрическое место центров кривизны какой-либо кривой называется эволютой, а сама кривая по отношению к эволюте — разверткой или эвольвентой. Следовательно, эвольвента окружности есть кривая, центры кривизны которой лежат на окружности. Эвольвента (для краткости в дальнейшем опускаем слово «окружности») может быть получена как траектория точки прямой, перекатывающейся без скольжения по окружности. В теории зацепления окружность, эвольвентой которой является профиль зуба, называется основной окружностью.
Н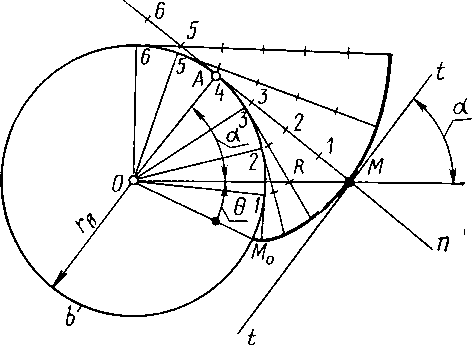 а
рисунке 1 показано построение
эвольвенты основной окружности b
при перекатывании по ней прямой,
называемой производящей
прямой. Пусть
производящая прямая показана в положении,
когда она касается основной окружности
в точке
А и надо
построить эвольвенту, описываемую
точкой М. Делим отрезок AM
на равные части (например, на четыре
части) и откладываем на основной
окружности дуги, равные соответствующим
частям отрезка
AM:
43=43, 32=32, и
т. д. (при малых центральных углах дуги
можно заменять хордами). Через
полученные точки деления окружности
проводим к ней касательные и откладываем
на них отрезки, последовательно уменьшая
длину каждого отрезка на одну часть.
Например, из точки 3 откладываем
отрезок, содержащий три части, из точки
2 — две части
и т. д. Соединяя концы отложенных отрезков,
получаем эвольвенту.
а
рисунке 1 показано построение
эвольвенты основной окружности b
при перекатывании по ней прямой,
называемой производящей
прямой. Пусть
производящая прямая показана в положении,
когда она касается основной окружности
в точке
А и надо
построить эвольвенту, описываемую
точкой М. Делим отрезок AM
на равные части (например, на четыре
части) и откладываем на основной
окружности дуги, равные соответствующим
частям отрезка
AM:
43=43, 32=32, и
т. д. (при малых центральных углах дуги
можно заменять хордами). Через
полученные точки деления окружности
проводим к ней касательные и откладываем
на них отрезки, последовательно уменьшая
длину каждого отрезка на одну часть.
Например, из точки 3 откладываем
отрезок, содержащий три части, из точки
2 — две части
и т. д. Соединяя концы отложенных отрезков,
получаем эвольвенту.
Е
Рис.1.
З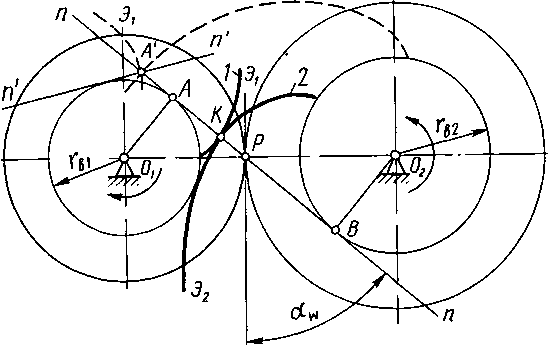 аметим
также, что эвольвенту можно представить
как траекторию точки М конца нити,
которая в натянутом положении наматывается
на барабан, диаметр которого равен
диаметру основной окружности.
аметим
также, что эвольвенту можно представить
как траекторию точки М конца нити,
которая в натянутом положении наматывается
на барабан, диаметр которого равен
диаметру основной окружности.
Рис.2.
Зубчатые передачи классифицируются по признакам, приведенным ниже.
По взаимному расположению осей колес (Рис. 4.): с параллельными осями (цилиндрическая передача, I—IV); с пересекающимися осями (коническая передача, V, VI); со скрещивающимися осями (винтовая передача, VII; червячная передача, VIII).
- В зависимости от относительного вращения колес и расположения зубьев различают передачи с внешним и внутренним зацеплением. В первом случае (I—III) вращение колес происходит в противоположных направлениях, во втором (IV) — в одном направлении. Реечная передача ( IX) служит для преобразования вращательного движения в поступательное.
- По форме профиля различают зубья эвольвентные (I, II) и неэвольвентные, например цилиндрическая передача Новикова, зубья колес которой очерчены дугами окружности.
- В зависимости от расположения теоретической линии зуба различают колеса с прямыми зубьями (I), косыми (II), шевронными (III) и винтовыми (IV). В непрямозубых передачах возрастает плавность работы, уменьшается износ и шум. Благодаря этому непрямозубые передачи большей частью применяют в установках, требующих высоких окружных скоростей и передачи больших мощностей.
- По конструктивному оформлению различают закрытые передачи, размещенные в специальном непроницаемом корпусе и обеспеченные постоянной смазкой из масляной ванны, и открытые, работающие без смазки или периодически смазываемые консистентными смазками.
- По величине окружной скорости различают: тихоходные передачи (v равной до 3 м/с), среднескоростные (v равной от 3... 15 м/с) и быстроходные (v более 15 м/с).
Зубчатые передачи с зацеплением M.Л. Новикова
В этом зацеплении профиль зубьев
выполняется не по эвольвенте, а по дуге
окружности (Рис.3.) или по кривой, близкой
к ней.
этом зацеплении профиль зубьев
выполняется не по эвольвенте, а по дуге
окружности (Рис.3.) или по кривой, близкой
к ней.
При зацеплении выпуклые зубья одного из колес контактируют с вогнутыми зубьями другого. Поэтому площадь соприкосновения одного зуба с другим в передаче Новикова значительно больше, чем в эвольвентных передачах. Касание сопряженных профилей теоретически происходит в точке, поэтому данный вид зацепления называют точечным.
П
Рис.3.
К
Рис.3.
К основным недостаткам передач с зацеплением Новикова относятся: технологическая трудоемкость изготовления колес, ширина колес должна быть не менее 6 модулей и др. В настоящее время передачи с зацеплением Новикова находят применение в редукторах больших размеров.
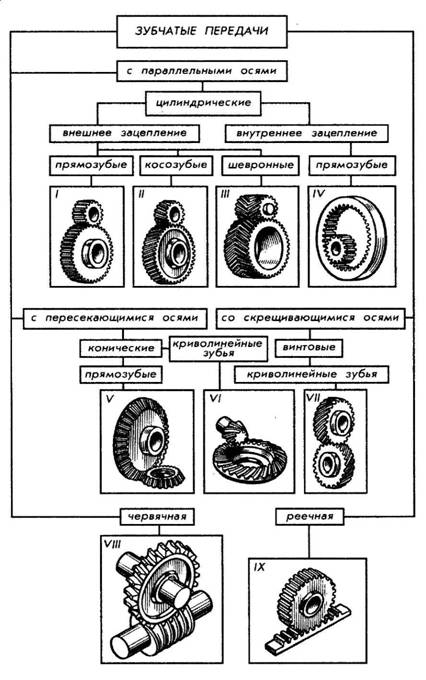
Рис.4. Типы зубчатых передач
Контроль зубчатых колес
Контроль элементов зуба и зацепления зубчатых колес производят согласно ГОСТ. Приборы контроля можно разделить на три группы: с записывающими устройствами (самописцами) для непрерывной записи погрешностей вдоль всего профиля зуба; для контроля нескольких параметров (эвольвенты, направления зуба, ошибки шага и радиального биения); с механическим приводом (измерение происходит автоматически, а установка и снятие измерительного зубчатого колеса — вручную).
Для контроля эвольвенты, направления зуба, ошибок шага и радиального биения зубчатого венца применяется универсальный прибор с записывающим устройством. На приборе измеряют прямозубые, косозубые, червячные и зубчатые колеса с внутренним зацеплением модулем до 12 мм и диаметром до 500 мм.
Для комплексной двухпрофильной проверки используют универсальные приборы с индикатором или записывающим устройством. Проверяют изменение измерительного межцентрового расстояния за один оборот колеса. Измеряемое и эталонное зубчатые колеса находятся в беззазорном зацеплении. Погрешности проверяемого колеса изменяют межцентровое расстояние этих колес, и при их взаимном вращении происходит перемещение плавающей каретки прибора. С кареткой связано перо устройства, записывающего колебания межцентрового расстояния. Устройство приводится во вращение от контролируемого колеса через ременную передачу и диски трения.
Для измерения уровня шума используют контрольно-обкатные станки, снабженные осциллографом, на экране которого регистрируются шумовые характеристики проверяемого зубчатого колеса. Величина допустимого уровня шума ограничена верхним и нижним пределами.
Окончательный контроль конических колес с винтовыми зубьями (например, ведомого колеса главной пары заднего моста) осуществляется на станках «Глиссон» в специальной кабине с эталонным ведущим колесом на шум, пятно контакта и боковой зазор.
Д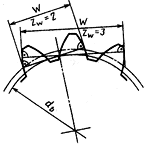 лина
общей нормали зубчатого колеса (W) длина
общей нормали. Расстояние между
разноименными боковыми поверхностями
зубьев цилиндрического зубчатого колеса
по общей нормали к этим поверхностям.
лина
общей нормали зубчатого колеса (W) длина
общей нормали. Расстояние между
разноименными боковыми поверхностями
зубьев цилиндрического зубчатого колеса
по общей нормали к этим поверхностям.
Рис.5.Длина общей нормали.
Эвольвентное зацепление.
Пусть профиль зуба звена 1 очерчен по эвольвенте основной окружности с радиусом rb1, а профиль зуба звена 2 — по эвольвенте основной окружности с радиусом rb2. Поместим центры этих окружностей в центры вращения 02 и 01 и приведем эвольвенты в соприкасание в точке K Нормаль к эвольвенте Э1 в точке К должна быть касательной к основной окружности звена 1, а нормаль к эвольвенте Э2 — касательной к основной окружности звена 2. В точке касания нормаль должна быть общей к обоим профилям, и, следовательно, точка К лежит на общей касательной к основным окружностям. При вращении звеньев 1 и 2 точка касания эвольвент перемещается по отрезку АВ этой касательной, так как вне отрезка АВ эвольвенты не могут касаться, т. е. иметь общую нормаль. Например, для точки А' нормаль к эвольвенте Э1 направлена по линии n'n', а к эвольвенте Э2 — по линии nn. Геометрическое место точек контакта сопряженных профилей (в рассматриваемом примере — отрезок АВ) называется линией зацепления.
Точка пересечения общей нормали к эвольвентам с межосевой линией (Р — полюс зацепления) занимает неизменное положение, и, следовательно, согласно основной теореме зацепления передаточное отношение u21 имеет постоянную величину
u21 = ±rw1/ rw2,
где rw1 = l01p и rw2 =l02p — радиусы начальных окружностей. Знак плюс относится к внутреннему зацеплению, а знак минус — к внешнему.
Угол между линией зацепления и прямой, перпендикулярной межосевой линии, называется углом зацепления и обозначается через аw. Из треугольников 01АР и 02ВР следует
rb1= rw1cosaw и rb2= rw2cosaw
Следовательно, при эвольвентном зацеплении передаточное отношение может быть также выражено через отношение радиусов основных окружностей:
u21 = ±rb1/ rb2,
Из видно, что при эвольвентном зацеплении изменение межосевого расстояния не влияет на передаточное отношение вследствие неизменности радиусов основных окружностей. При изменении межосевого расстояния изменяются лишь радиусы начальных окружностей и угол зацепления.