

15. Неприступными называются расстояния, недоступные для непосредственного измерения.
Если непосредственное измерение линии на местности по тем или иным причинам невозможно, то применяются различные косвенные способы определения расстояний.
При использовании косвенного метода измеряют вспомогательные параметры (углы, базисы, физические параметры), а длину отрезка вычисляют по формулам, например, если по линии АВ отсутствуют условия для непосредственного измерения, то измеряют длины линий а1 и b1, горизонтальный угол ?1 (рис. 3.1), а длину линии вычисляют по формуле:
Для контроля и повышения точности с противоположной стороны препятствия строят другой треугольник и измеряют длины линий а2 и b2, горизонтальный угол ?2 и вычисляют d2.
Подсчитывают абсолютную относительную погрешности
если fотн не превышает допустимого значения, находят среднее значение d.
16.
1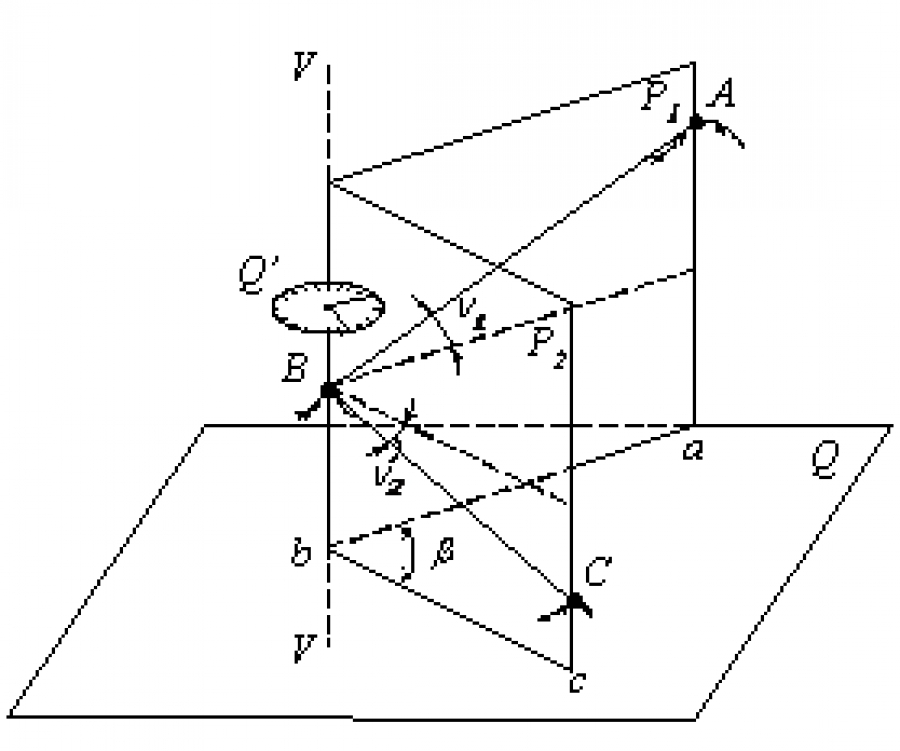
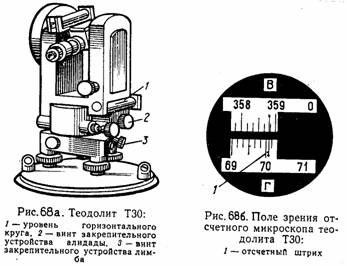
17. Главными составными частями теодолита являются: осевая система (опорно-поворотное устройство), рабочие меры, зрительная труба, отсчетные системы, уровни, приспособления для установки и центрирования.
Система осей предназначена для прецизионного вращения при геодезических измерениях отдельных частей приборов в горизонтальной и вертикальной плоскостях. Следовательно, геометрические оси соответствующих систем осей в рабочем положении совмещаются с отвесной или перпендикулярной ейгоризонтальной линией, а сами оси называются вертикальной (ось вращения прибора — ZZ,) или горизонтальной осями (ось вращения трубы — ЯЯ,) прибора.
Конструкции осевых систем обеспечивают точность, надежность, долговечность геодезических приборов. Осевые системы соединяют отдельные части приборов, обеспечивая в тоже время постоянство взаимного положения оптико-механических узлов и возможность вращения одних частей прибора относительно других.
В схеме прибора вертикальная ось является базой, относительно которой располагают другие оси и плоскости (например: оси цилиндрических уровней UUV по которым устанавливают прибор, должны быть перпендикулярны, а оси круглых (сферических) уровней параллельны вертикальной оси).
18.Измерение угла способом приемов. Прием состоит из двух полуприемов. Первый полуприем выполняют при положении вертикального круга слева от зрительной трубы. Закрепив лимб и открепив алидаду, наводят зрительную трубу на правую визирную цель. После того как наблюдаемый знак попал в поле зрения трубы, зажимают закрепительные винты алидады и зрительной трубы и, действуя наводящими винтами алидады и трубы, наводят центр сетки нитей на изображение знака и берут отсчёт по горизонтальному кругу. Затем, открепив трубу и алидаду, наводят трубу на левую визирную цель и берут второй отсчёт. Разность первого и второго отсчётов даёт величину измеряемого угла. Если первый отсчёт оказался меньше второго, то к нему прибавляют 360º.
Второй полуприем выполняют при положении вертикального круга справа, для чего переводят трубу через зенит. Чтобы отсчёты отличались от взятых в первом полуприеме, смещают лимб на несколько градусов. Затем измерения выполняют в той же последовательности, как в первом полуприеме.
Если результаты измерения угла в полуприёмах различаются не более двойной точности прибора (то есть 1¢ для теодолита Т30), вычисляют среднее, которое и принимают за окончательный результат.
19. Нивелирование - это вид геодезических работ по определению превышений. Нивелирование обычно используют для определения высот точек при составлении топографических планов, карт, профилей, при перенесении проектов застройки и планировки территории по высоте. При производстве строительно-монтажных работ с помощью нивелирования устанавливают строительные конструкции в проектное положение по высоте. Применяют нивелирование при наблюдениях за осадками и деформациями зданий, для определения вертикальных перемещений точек зданий и сооружений.
В процессе нивелирования находят разности отметок, или превышения между точками; по данной отметке начальной точки и по превышениям получают отметки всех остальных точек местности. В геометрическом нивелировании превышения определяются отсчетами по вертикальным рейкам при* горизонтальной линии визирования.
Геометрическое нивелирование из середины: Пусть надо определить превышение точки В над точкой А . Поставим в точках А и В отвесно рейки, разделенные на сантиметры, а между ними по возможности на одинаковых расстояниях — нивелир. Направив установленную горизонтально визирную ось инструмента последовательно на обе рейки, делаем отсчеты по ним а и b. Видно, что искомое превышение h определяется из равенства
(1)h = а-b.
Если считать условно точку А задней, а точку В — передней, то формулу (1) можно выразить словами так: превышение передней точки над задней равно взгляду (отсчету по рейке) назад минус взгляд вперед.
Если превышение по указанной формуле окажется положительным, то это покажет, что передняя точка лежит выше задней и, следовательно, линия АВ повышается. Отрицательное превышение означает, что точка В ниже точки А, т. е. линия А В понижается.
Зная отметку H1г точки А и превышение ее h над точкой В, получают отметку точки В по формуле
(2) H2=H1+h,
т.е. отметка последующей точки равна отметке предыдущей точки плюс соответствующее превышение.
Высота визирной оси над условным горизонтом или над уровнем моря называется горизонтом инструмента.
H[i]=H1+a,
т. е. горизонт инструмента равен отметке точки плюс взгляд на эту точку. Зная горизонт инструмента, легко найти отметку любой точки, на которую был сделан взгляд.
H2=H[i]-b
т. е. отметка точки равна горизонту инструмента минус взгляд на эту точку. Таким образом, по данной отметке какой-либо точки и по взглядам на другие
точки отметки этих последних могут быть получены двояко: по превышениям и по горизонту инструмента. Один способ может служить для контроля другого.
Вычисление отметок по горизонту инструмента очень удобно, когда с одной станции (точки стояния инструмента) были сделаны взгляды на несколько точек, из которых для одной дана отметка.
Нивелирование вперед. Иногда нивелир устанавливают так, что окуляр зрительной трубы приходится по отвесу над точкой А Вертикальное расстояние I от центра окуляра при установленной горизонтально визирной оси зрительной трубы до точки А называется высотой инструмента.
Пусть в точке В вертикально установлена рейка. Направив на нее горизонтальную визирную ось и сделав отсчет по рейке Ь, получим
h=i-b
т. е. в этом случае превышение равно высоте инструмента минус взгляд вперед. Высоту инструмента можно отсчитать по рейке или изморить рулеткой. Если передняя точка В выше задней A,то превышение положительно; при понижении местности от А к В — превышение отрицательно.
В процессе нивелирования находят разности отметок, или превышения между точками; по данной отметке начальной точки и по превышениям получают отметки всех остальных точек местности. В геометрическом нивелировании превышения определяются отсчетами по вертикальным рейкам при* горизонтальной линии визирования.
Геометрическое нивелирование из середины: Пусть надо определить превышение точки В над точкой А . Поставим в точках А и В отвесно рейки, разделенные на сантиметры, а между ними по возможности на одинаковых расстояниях — нивелир. Направив установленную горизонтально визирную ось инструмента последовательно на обе рейки, делаем отсчеты по ним а и b. Видно, что искомое превышение h определяется из равенства
(1)h = а-b.
Если считать условно точку А задней, а точку В — передней, то формулу (1) можно выразить словами так: превышение передней точки над задней равно взгляду (отсчету по рейке) назад минус взгляд вперед.
Если превышение по указанной формуле окажется положительным, то это покажет, что передняя точка лежит выше задней и, следовательно, линия АВ повышается. Отрицательное превышение означает, что точка В ниже точки А, т. е. линия А В понижается.
Зная отметку H1г точки А и превышение ее h над точкой В, получают отметку точки В по формуле
(2) H2=H1+h,
т.е. отметка последующей точки равна отметке предыдущей точки плюс соответствующее превышение.
Высота визирной оси над условным горизонтом или над уровнем моря называется горизонтом инструмента.
H[i]=H1+a,
т. е. горизонт инструмента равен отметке точки плюс взгляд на эту точку. Зная горизонт инструмента, легко найти отметку любой точки, на которую был сделан взгляд.
H2=H[i]-b
т. е. отметка точки равна горизонту инструмента минус взгляд на эту точку. Таким образом, по данной отметке какой-либо точки и по взглядам на другие
точки отметки этих последних могут быть получены двояко: по превышениям и по горизонту инструмента. Один способ может служить для контроля другого.
Вычисление отметок по горизонту инструмента очень удобно, когда с одной станции (точки стояния инструмента) были сделаны взгляды на несколько точек, из которых для одной дана отметка.
Нивелирование вперед. Иногда нивелир устанавливают так, что окуляр зрительной трубы приходится по отвесу над точкой А Вертикальное расстояние I от центра окуляра при установленной горизонтально визирной оси зрительной трубы до точки А называется высотой инструмента.
Пусть в точке В вертикально установлена рейка. Направив на нее горизонтальную визирную ось и сделав отсчет по рейке Ь, получим
h=i-b
т. е. в этом случае превышение равно высоте инструмента минус взгляд вперед. Высоту инструмента можно отсчитать по рейке или изморить рулеткой. Если передняя точка В выше задней A,то превышение положительно; при понижении местности от А к В — превышение отрицательно.