

4.2. Переходные характеристики типовых звеньев
4.2.1. Пропорциональное (безынерционное, усилительное) звено
Звено (рис. 4.4) может
только усиливать или ослаблять сигнал
и описывается уравнением
![]() .
В ответ на единичное ступенчатое
воздействие сигнал на выходе мгновенно
достигает величины в k
раз большей, чем на входе и сохраняет
это значение. При
k = 1 звено
никак себя не проявляет, а при k = –1
инвертирует входной сигнал.
.
В ответ на единичное ступенчатое
воздействие сигнал на выходе мгновенно
достигает величины в k
раз большей, чем на входе и сохраняет
это значение. При
k = 1 звено
никак себя не проявляет, а при k = –1
инвертирует входной сигнал.
Передаточная
функция звена –
![]() .
.
Переходная
характеристика описывается уравнением
![]() .
.
Рис. 4.4. Пропорциональное звено |
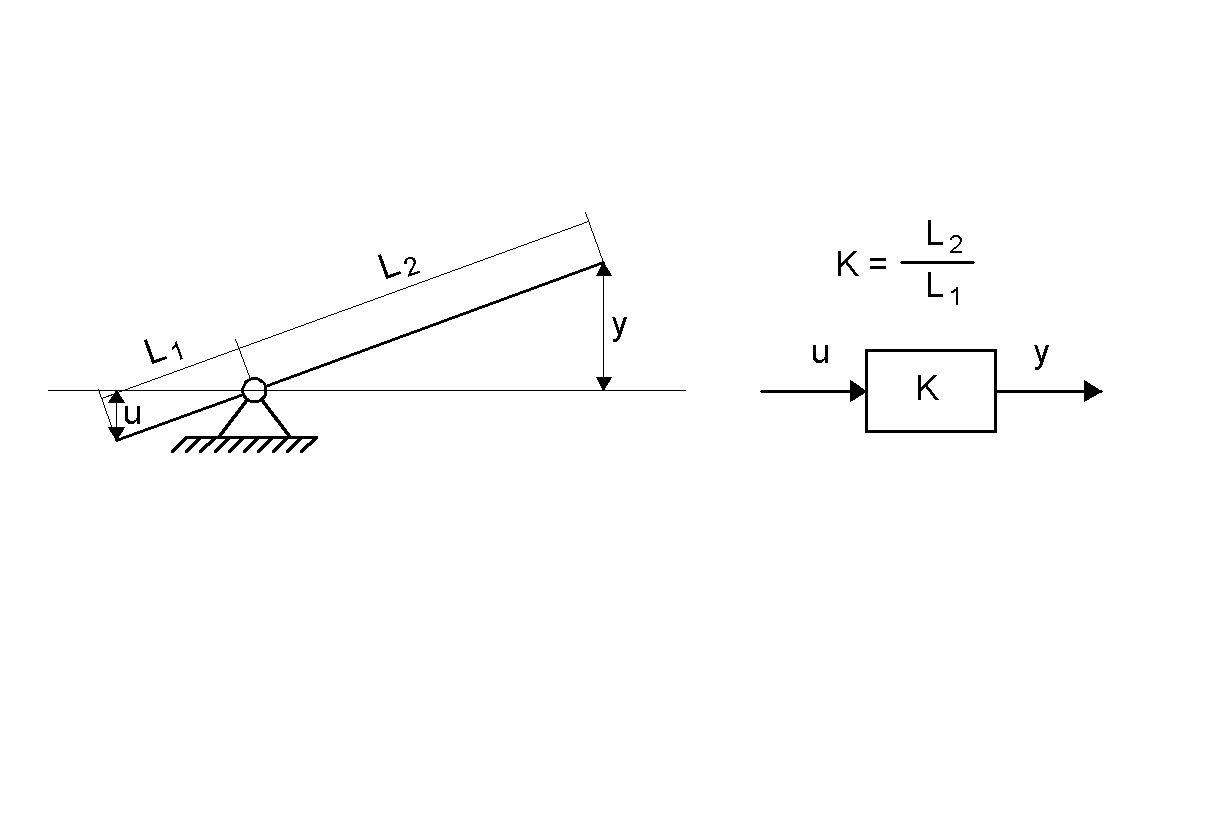
Любое реальное звено обладает инерционностью, но с определенной точностью некоторые реальные звенья могут рассматриваться как безынерционные, например, жесткий механический рычаг, редуктор, электронный усилитель и т. п.
4.2.2. Интегрирующее (астатическое) звено
Идеальное интегрирующее звено неограниченно «накапливает» входное воздействие:
|
Передаточная функция звена –
|
где k = 1/Т – коэффициент усиления звена.
Переходная характеристика –
|
 .
.
Примеры интегрирующих звеньев: исполнительный механизм с электроприводом, поршневой гидравлический двигатель и т. п.
Рис. 4.5. Интегрирующее звено |
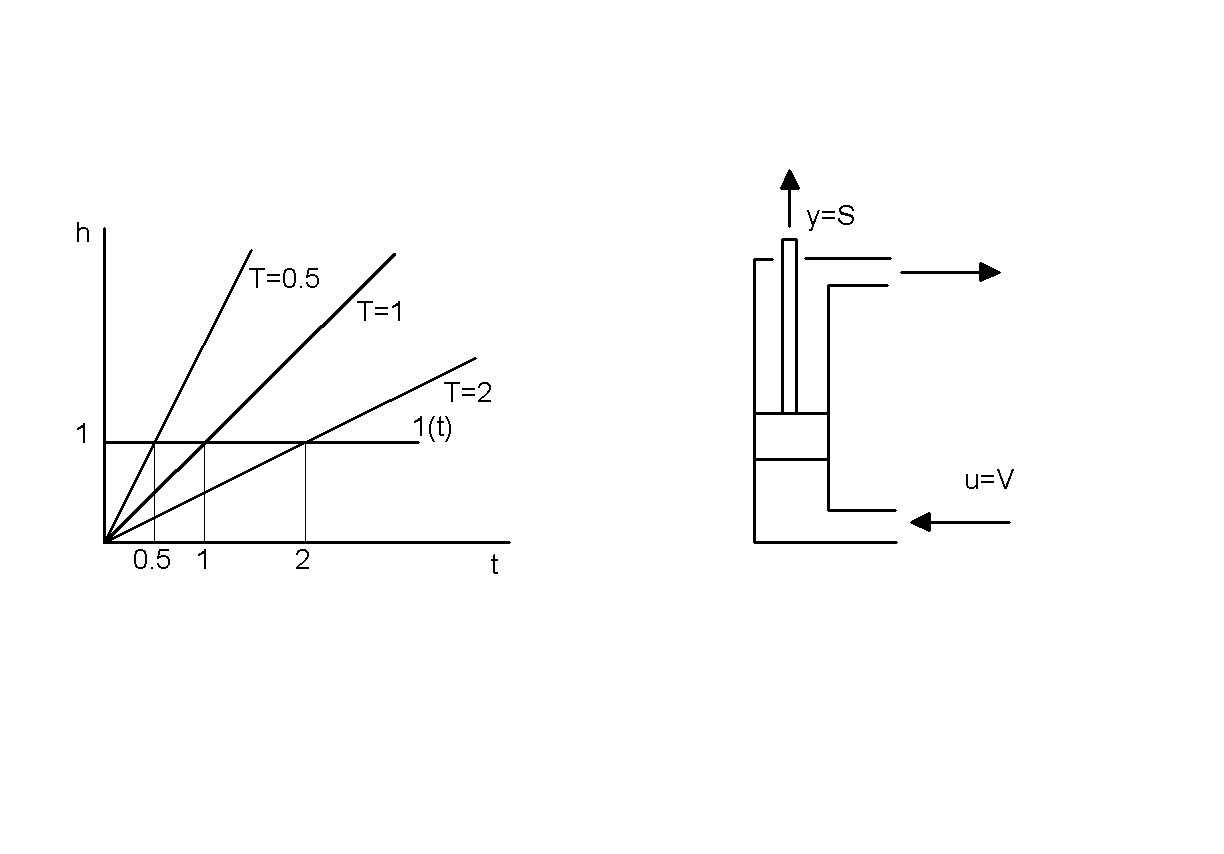
Переходная функция интегратора линейно растет с течением времени. Скорость роста обратно пропорциональна постоянной времени интегратора. Выходной сигнал интегратора достигает уровня ступенчатой функции за время, равное постоянной времени Т интегратора. Это позволяет определять постоянную времени интегратора по его экспериментально снятой характеристике.
Рассмотрим в качестве примера интегрирующего звена гидроцилиндр (рис. 4.5). В этом устройстве входным воздействием u является расход рабочей жидкости V, а выходной величиной y – перемещение штока гидроцилиндра S. Перемещение штока описывается уравнением
|
где F – площадь поршня гидроцилиндра; k =1/F – коэффициент усиления звена. Очевидно, что чем меньше площадь поршня, тем выше скорость перемещения штока при одинаковом значении расхода рабочей жидкости.
4.2.3. Инерционное звено первого порядка (апериодическое)
Это звено описывается
дифференциальным уравнением
![]() где k
– передаточный коэффициент, характеризующий
свойства звена в статическом режиме; T
– постоянная времени, характеризующая
инерционность звена. Физически
апериодическое звено содержит один
накапливающий энергию элемент, а также
один или несколько элементов, способных
ее рассеивать.
где k
– передаточный коэффициент, характеризующий
свойства звена в статическом режиме; T
– постоянная времени, характеризующая
инерционность звена. Физически
апериодическое звено содержит один
накапливающий энергию элемент, а также
один или несколько элементов, способных
ее рассеивать.
Передаточная функция звена –
|
Поскольку характеристическое уравнение имеет один корень p1 =
= –1/T, то переходная характеристика звена (находится как сумма общего и частного решений дифференциального уравнения) имеет вид:
|

При подстановке нулевых начальных условий h(0) = 0 получаем
|
|
|

Переходная характеристика имеет вид экспоненты, по которой можно определить передаточный коэффициент k, равный установившемуся значению h(t), и постоянную времени Т по времени t, соответствующему точке пересечения касательной к кривой в начале координат с ее асимптотой. При достаточно больших Т звено на начальном участке может рассматриваться как интегрирующее, при малых Т звено приближенно можно рассматривать как безынерционное. Примеры апериодического звена: гидромеханический демпфер, термопара, радиатор системы отопления и т. п.
Из рисунка видно, что апериодическое звено не сразу, а постепенно реагирует на ступенчатое воздействие, в чем и проявляется его инерционность. Инерционность численно характеризуется постоянной времени, поскольку переходный процесс заканчивается за время 3Т. За это время переходная характеристика достигает 95% уровня, к которому она стремится при стремлении времени к бесконечности.
В качестве примера апериодического звена рассмотрим гидравлическое демпфирующее устройство (рис. 4.6). Здесь накапливание энергии осуществляется пружиной, а рассеивание энергии происходит за счет сил вязкостного трения. В исходном состоянии поршень демпфера находится в крайнем верхнем положении и пружина полностью расслаблена. Воздействуем на поршень некоторой внешней силой F. Скорость перемещения штока будет пропорциональна скорости перетекания жидкости из нижней части стакана в верхнюю. Скорость перетекания определяется величиной создаваемого поршнем перепада давления и величиной гидравлического сопротивления перепускной линии. Величина перепада давления пропорциональна силе, действующей на поршень. Эта сила равна сумме внешней силы и силы реакции пружины. В начальный момент времени реакция пружины равна нулю и скорость перемещения штока будет пропорциональна внешнему воздействию. По мере перемещения поршня реакция пружины возрастает и результирующая сила воздействия на поршень начинает уменьшаться. Поскольку пропорционально уменьшается перепад давления, то снижается и расход жидкости через перепускную линию. Скорость перемещения штока постепенно падает. Положение штока экспоненциально стремится к состоянию равновесия, когда внешняя сила будет уравновешена силой реакции пружины.

Рис. 4.6. Апериодическое звено
Если термопару с начальной температурой t0 поместить в среду с более высокой температурой t1, то кривая изменения выходного сигнала термопары также будет иметь вид экспоненты. Скорость изменения выходного сигнала термопары определяется скоростью изменения температуры рабочего спая термопары t. Скорость изменения температуры зависит от массы термопары, теплоемкости, коэффициента теплопередачи, разности температур и площади поверхности теплообмена. В начальный момент времени скорость изменения выходного сигнала максимальна, поскольку разность температур t1 – t = t1 – t0 также максимальна. По мере нагрева термопары величина Δt = t1 – t уменьшается, соответственно уменьшается и скорость изменения выходного сигнала термопары. В пределе Δt стремится к нулю, скорость изменения выходного сигнала также стремится к нулю, т. е. термопара ведет себя как апериодическое звено. Это утверждение справедливо также для любого термометра контактного типа.