

10.Вектор углового перемещения, угловая скорость, прямая и обратная связь угловой скорости и вектора углового перемещения.
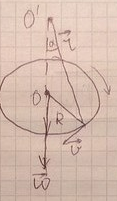
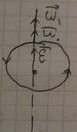
За бесконечно малый промежуток времени dt точка пермещается на бесконечно малый угол dфи.
Вектор углового пермещения характеризуется своим значение dфи и направление перпендикулярным плосокости окружности.
Направление dфи определяется правилом правого винат- если винт вращать в сторону увелечения угла dфи от 1 ко 2 то направление пост движения винта укажет направление dфи.
Свойством быть вектором обладают лишь бесконечно малые угловые премещения dфи а не конечные дельта фи.
Псевдовектор не имеет не имеет точки приложения dфи.
Вектор
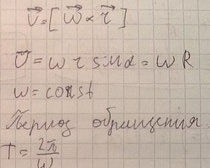
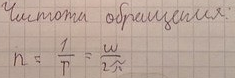
угловой скорости- вектор линейной
скорости движения по окружности мат
точки определяется

![]()
12.Связь линейных и угловых кинематических характеристик
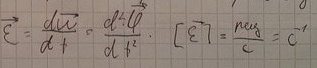
11.Угловое ускорение, прямая и обратная связь угловой скорости и углового ускорения
Кинематическая характеристика вращ движения, которая вводится при неравномерном движение.

![]()
![]()
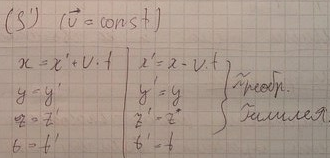
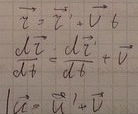
13.Инерциальные и неинерциальный со, Принцип относительно и преобразования Галилея.
Все
системы отсчет эквиваленты.В динамике
одно и тоже движение рассматривается
по разному в разных СО.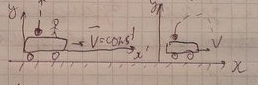
Классическая механика постулирует что все СО, в которых свобод тела движ равномерно и прямолинейно являются ИСО.
СО в которых действуют силы тяготения и в которых не выполняются 1 и 2 законы Ньютона называются НИСО.
ИСО движется без ускорения и зам вращения.
СО в которых системой является Земля не являются ИСО, так как земля вращаеттся вокруг своей оси и совершает вращение вокруг Солнца.
Центр на Солнце и оси направлены на звезды.
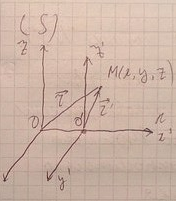
Система S является также ИСО.
Во всех ИСО механические явления , протекают одинаково, тоесть уравнения Ньютона инвариантны относительно преобразование Галилея.
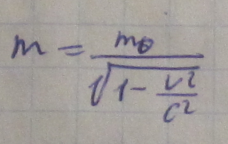
14.Масса тела и его св-ва, центр масс системы.
Масса тела
основная механическая величина, определяющая величину ускорения, сообщаемого телу данной силой. М. тел прямо пропорциональны силам, сообщающим им равные ускорения и обратно пропорциональны ускорениям, сообщаемыми им равными силами. m = f/a

m- аддитивная величина- это масса тела, равная сумме масс, составляющих его частей.
![]()
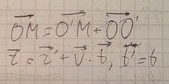
Центр
масс – это точка геометрическая, радиус
вектор которой равен
Положение точки центр масс не зависит от выбора СО, в которой оно определяется.
Утверждение справедливо в механике малых скоросетй.
Если V тела близко к C, то положение центр масс не имеет смысла.
15.Импульс материальной точки, системы Мат точки и тв тела.
Мат точка
При
![]()
Системы Мат точки- совокупность конечного числа Мат точек.
i-я
точка
ТВ тело (v<<c)

![]()
16.Фундаментальные и нефундаментальные взаимодействия, сила как мера взаимодействия, св-ва сил.
Сила – векторная колличесвенная мера интенсивности взаимодействия между телами.
F=-F. Сила – функция радиуса вектора и его скорости относ др мат точек.
F=F(r,v) векторная. Сила причина изменения скорости тела. Так как изменение V характеризуется a а=dv/dt, то динамическое проявление силы F состоит в том что тело под дейсвием этой слы движется с ускорением.
Статическое
дейсвие силы приводит к тому что упругие
тела под действием это сыли деформируются,
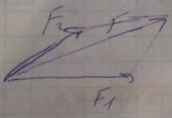
газы сжимаются и тд. Если на тело дейсвует
несколько сил то векторная сумма этих
сил – равнодействующая сила. F1+F2+Fn
![]()
![]()
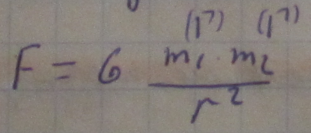
Фундаментальные и нефундаментальные взаимодействия.
Все силы, рассматриваемые в физике можно свести к 4 основным силам, кот называются фундаментальными. Данные силы обусловлены фундаментальными взаимодействиями. Фундаментальные силы — силы, кот при современном состоянии науки не могут быть сведены ни к каким другим силам.
Все фундаментальные взаимодействия: Fтр, Fупр, сила гидростатического давления, сила поверхностного натяжения, сила Архимеда
Фундаментальные взаимодействия: сильные(ядерные)-протоны, нейтроны;Э/м — все электрически заряженные частицы; слабое — элементарные частицы, гравитационное — все.