

3. Оптимальная демодуляция непрерывных сигналов.
Определим условия оптимального приёма непрерывных сообщений. Пусть сообщение представляет собой некоторый стационарный процесс (первичный сигнал) с реализацией b(t). Он может непрерывно изменяться во времени и принимать любую форму.
Для простоты анализа будем считать, что функция b(t) принимает значения от -1 до +1, что реализации сообщения имеют конечную длительность Т и что их спектр практически ограничен частотами от 0 до Fc. При этих условиях функция b(t) может быть разложена по ортонормированному базису {ψk(t)} и представлена в виде усечённого ряда
 (8.17)
(8.17)
где
λk
- случайные коэффициенты,
определяющие передаваемое сообщение.
При разложении в тригонометрический
ряд Фурье λk
пропорциональны составляющим
спектра, а при разложении в ряд Котельникова
- отсчётным значениям
 функции
b(t).
Здесь
функции
b(t).
Здесь
 .
Таким образом, при
известной системе базисных функций
{ψk(t)}
передача непрерывных
сообщений b(t)
эквивалентна передаче
В значений
коэффициентов (параметров) λk
. Для передачи по каналу
колебание b(t)
преобразуется в сигнал
s(t,
b).
Поскольку колебание
(8.17) определяется параметрами λk
(k
= 1, 2, …. , В),
то и сигнал зависит от
этих параметров. Принятое колебание с
учётом наложения помехи z(t)
= s(t,
b)
+ n(t)
= s(t,
λ) + n(t).
(8.18)
.
Таким образом, при
известной системе базисных функций
{ψk(t)}
передача непрерывных
сообщений b(t)
эквивалентна передаче
В значений
коэффициентов (параметров) λk
. Для передачи по каналу
колебание b(t)
преобразуется в сигнал
s(t,
b).
Поскольку колебание
(8.17) определяется параметрами λk
(k
= 1, 2, …. , В),
то и сигнал зависит от
этих параметров. Принятое колебание с
учётом наложения помехи z(t)
= s(t,
b)
+ n(t)
= s(t,
λ) + n(t).
(8.18)
Влияние
помех приводит к тому, что каждый параметр
λk
будет принят с некоторой погрешностью
 .
В результате оценка
сообщения
.
В результате оценка
сообщения

где
 -
погрешность воспроизведения сообщения
b(t)
(шум на выходе приёмника).
-
погрешность воспроизведения сообщения
b(t)
(шум на выходе приёмника).
Таким образом, задача оптимального приёма непрерывного сообщения b(t) сводится к задаче совместного оптимального приёма совокупности многих параметров λ=( λ1, λ2, …, λB). Эта задача является обобщением рассмотренной в
§ 8.2 Задачи оптимальной оценки одного параметра.
По реализации z(t) необходимо восстановить переданное сообщение b(t) с возможно большей точностью, хотя бы при слабых помехах. Для этого необходимо на основе анализа принятого колебания z(t) найти максимум апостериорного распределения w(b|z), которое на основе формулы Байеса может быть представлено в виде
w(b|z) = kw(b)w(z|b), (8.20)
где k - постоянный коэффициент. Функция правдоподобия w(z|b), входящая в выражение (8.20), известна (для рассматриваемого гауссовского канала - это гауссовское распределение). Априорное распределение w(b) зависит от вида и характеристик передаваемых сообщений b(t).
Выбор конкретной модели априорного распределения w(b) является не столь существенным [26]. Роль начальных, априорных сведений уменьшается с увеличением объёма наблюдений. При большом объёме наблюдений алгоритмы обработки сигналов получаются асимптотически одинаковыми, т.е. мало чувствительными к априорному распределению. Поэтому ограничимся рассмотрением модели равномерного распределения w(b) = const. В этом случае решение задачи упрощается, так как согласно (8.20) апостериорное распределение w(b|z) будет полностью определяться функцией правдоподобия w(z|b), которая для гауссовского канала определяется выражением, аналогичным (8.12):
![]() Согласно
этому выражению максимуму функции
правдоподобия w(z|b),
а следовательно, и функции w(b|z)
соответствует минимум по b(t)
интеграла
Согласно
этому выражению максимуму функции
правдоподобия w(z|b),
а следовательно, и функции w(b|z)
соответствует минимум по b(t)
интеграла
![]()
Значит, оптимальный приёмник должен воспроизводить сообщение b(t), которое соответствует, как и при передаче дискретных сообщений, тому из возможных сигналов s(t,b), который меньше других отличается в среднеквадратическом смысле от реализации сигнала z(t) на входе приёмника.
При
отсутствии помех такой приёмник
воспроизводит сообщение без искажений
(без ошибок): z(t)
=
s(t,
b(t)),
b(t)
=
b(t)
и
 ,
а при наличии помех ошибка минимальна.
,
а при наличии помех ошибка минимальна.
Запишем (8.20) в другом виде, подобном (8.15):
![]() где
где
![]()
Отсюда следует, что при известной априорной вероятности определение апостериорной вероятности сводится к вычислению функции q(b), т.е. скалярного произведения принятого колебания z(t) на переданные (ожидаемые) сигналы s(t,b(t)).
<Во многих случаях для приближённого нахождения q(b) целесообразно применение простых следящих устройств. Рассмотрим принципиальную возможность построения таких устройств. Подробное и более строгое обоснование на основе теории нелинейной фильтрации приводится в § 8.8.
При
передаче непрерывных сообщений сигнал
s(t,b(t))
не
является полностью известным. Однако
обычно имеется некоторая априорная
информация об этом сигнале. Известны,
например, несущая частота, вид
модуляции, ширина спектра сигнала и
т.п. Часть информации можно получить в
результате наблюдения над принятой
реализацией сигнала z(f)
за
предшествующий промежуток времени.
В результате имеется возможность
определить оценку сигнала
 и
вычислить функцию
и
вычислить функцию
 для
этой оценки:
для
этой оценки:
![]()
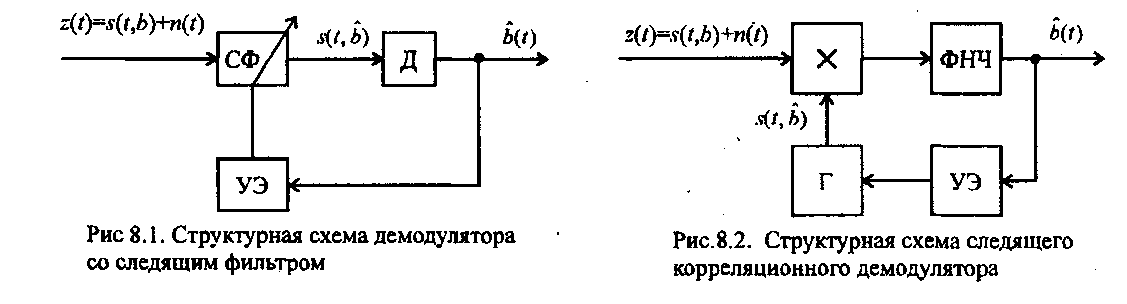
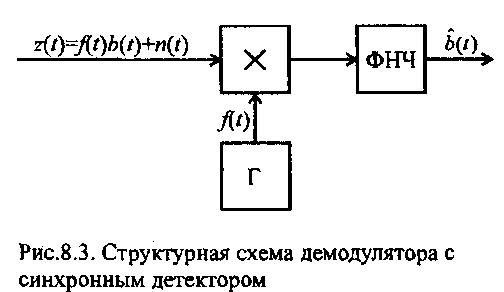
Функцию
 можно
найти с помощью фильтра с переменными
параметрами (рис. 8.1)
или
схемы следящего коррелятора (рис. 8.2).
Каждая из этих схем имеет основной
информационный канал, на выходе которого
получается оценочное значение
можно
найти с помощью фильтра с переменными
параметрами (рис. 8.1)
или
схемы следящего коррелятора (рис. 8.2).
Каждая из этих схем имеет основной
информационный канал, на выходе которого
получается оценочное значение
 передаваемого
сообщения, и канал обратной связи, с
помощью которого в схеме рис. 8.2 формируется
опорный сигнал
,
а
в схеме рис. 8.1
с
помощью управляющего элемента (УЭ)
производятся изменения параметров
фильтра СФ так, чтобы он был согласован
с непрерывно изменяющимся ожидаемым
сигналом
.
В
схеме рис. 8.2 с помощью УЭ изменяется
модулируемый параметр несущего
колебания, формируемого генератором
(Г).
передаваемого
сообщения, и канал обратной связи, с
помощью которого в схеме рис. 8.2 формируется
опорный сигнал
,
а
в схеме рис. 8.1
с
помощью управляющего элемента (УЭ)
производятся изменения параметров
фильтра СФ так, чтобы он был согласован
с непрерывно изменяющимся ожидаемым
сигналом
.
В
схеме рис. 8.2 с помощью УЭ изменяется
модулируемый параметр несущего
колебания, формируемого генератором
(Г).
При частотной модуляции, например, этим параметром будет частота, при временной импульсной модуляции — сдвиг импульсов во времени и т.п. Фильтр нижних частот ФНЧ в этой схеме выполняет роль интегратора на интервале наблюдения Т, который связан с максимальной частотой Fc в спектре передаваемого сообщения соотношением Т = l/(2Fc).
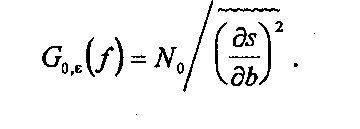
Рассмотренные схемы являются квазиоптимальными, поскольку получаемая оценка не является наилучшей возможной. При различных видах модуляции принцип следящего приёма остаётся одним и тем же. Вид модуляции определяет параметр, за которым должно осуществляться слежение. Иначе говоря, оптимальный приёмник должен с наименьшей ошибкой следить за передаваемым случайным колебанием b(t). Схемы следящего приёма позволяют практически реализовать помехоустойчивость, близкую к потенциальной. При линейной модуляции, когда s(t,b(t)) = f(t)b(t), где f(t)- известная функция (несущее колебание), оптимальный демодулятор можно реализовать разомкнутой схемой с синхронным детектором (рис. 8.3)
 >
>
Перейдём к определению помехоустойчивости систем связи при оптимальном приёме. Заметим, что эту потенциальную помехоустойчивость можно вычислить, не уточняя структуры оптимального демодулятора. Для этого достаточно знать, что он выдаёт решение , соответствующее минимуму (8.21).
Прежде чем приступить к выводу формул, определяющих потенциальную помехоустойчивость, напомним основные принципы классификации видов модуляции при передаче непрерывных сообщений. В общем случае модуляция заключается в том, что множество сообщений (первичных сигналов) B(t) преобразуется (отображается) в множество вторичных сигналов S(t)=S[t,B(t)]. Этой записью подчеркивается, что значение сигнала S в некоторый момент t определяется в общем случае всем поведением сообщения B(t) на всей оси времени.
В частном случае, если сигнал S(t) в любой момент t зависит не от всего хода сигнала B(t), а только от его значения в момент t, то система модуляции называется прямой. В этом случае сообщение b(t) входит непосредственно в выражение сигнала s(t). К прямым относится подавляющее большинство применяемых методов модуляции, например AM, БАМ и ФМ. Остальные системы модуляции, в которых S(t) зависит от общего поведения сигнала B(t), называются непрямыми. Среди них особый интерес представляют интегральные системы, в которых B(t) входит в выражение S(t) под интегралом.
Система модуляции называется линейной, если S(t) можно получить из B(t) с помощью линейных операций. Линейные системы могут быть прямыми (например, амплитудная - AM) и непрямыми (например, однополосная - ОМ).
Геометрически модуляцию можно рассматривать как отображение пространства В сообщений в пространство сигналов S, а демодуляцию - как обратное отображение. При демодуляции помеха n(t) на входе приёмника отображается в погрешность оценки сообщения (шум воспроизведения или шум на выходе приёмника) ε(t).
Рассмотрим
приём непрерывного сообщения на фоне
Б ГШ со спектральной плотностью N0.
При
достаточно слабом шуме n(t)
погрешность
 (шум на выходе приёмника) представляет
собой также гауссов-ский процесс со
спектральной плотностью Gε(f),
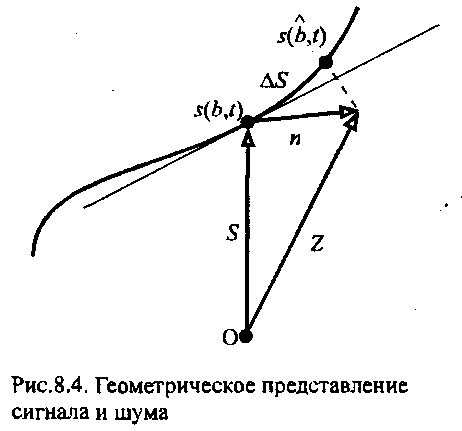
которую и будем определять. Для. этого
удобно воспользоваться геометрическим
представлением. В пространстве
сигналов каждой реализации сигнала
s(t,b(t))
при
различных b(t)
соответствует
точка. Если s(b)
зависит непрерывно от b
(что имеет место во всех аналоговых
системах связи), то все эти точки образуют
некоторую кривую (рис. 8.4). Принятый
сигнал z(t)
является также точкой в пространстве
сигналов, как правило, не лежащей на
кривой s(b).максимально
правдоподобная оценка
соответствует тому сигналу, который
изображается на сигнальной кривой
точкой, ближайшей к точке z.
Обозначим
(шум на выходе приёмника) представляет
собой также гауссов-ский процесс со
спектральной плотностью Gε(f),
которую и будем определять. Для. этого
удобно воспользоваться геометрическим
представлением. В пространстве
сигналов каждой реализации сигнала
s(t,b(t))
при
различных b(t)
соответствует
точка. Если s(b)
зависит непрерывно от b
(что имеет место во всех аналоговых
системах связи), то все эти точки образуют
некоторую кривую (рис. 8.4). Принятый
сигнал z(t)
является также точкой в пространстве
сигналов, как правило, не лежащей на
кривой s(b).максимально
правдоподобная оценка
соответствует тому сигналу, который
изображается на сигнальной кривой
точкой, ближайшей к точке z.
Обозначим
 ,
где
b(t)
- действительно
переданное сообщение. При малой помехе
и, следовательно, малом отклонении
,
где
b(t)
- действительно
переданное сообщение. При малой помехе
и, следовательно, малом отклонении
 отрезок
между s(b)
и
отрезок
между s(b)
и
 можно
аппроксимировать прямой линией,
которая является касательной к линии
сигнала в точке s(b).
Тогда
представляет
проекцию вектора n
на эту прямую. В этом случае справедливо
представление
можно
аппроксимировать прямой линией,
которая является касательной к линии
сигнала в точке s(b).
Тогда
представляет
проекцию вектора n
на эту прямую. В этом случае справедливо
представление
![]() (8.25)
(8.25)
Здесь
n1(t)
-
составляющая (координата) шумового
вектора в пространстве сигналов,
представляющая низкочастотный гауссовский
эргодический процесс с нулевым МО и со
спектральной плотностью N0
в
полосе
частот от 0 до Fc,
 .
Тогда с учётом (8.25) в единичной полосе
частот
.
Тогда с учётом (8.25) в единичной полосе
частот
![]() (8.26)
(8.26)
Поскольку
процесс ∆b(t)
(компонента
шума на выходе приёмника) меняется
значительно медленнее процесса
 , то
, то
![]() (8.27)
(8.27)
 (8.28)
(8.28)
При
прямых системах модуляции
 не
зависит от частоты. Таким образом,
при прямых системах модуляции шум на
выходе приёмника квазибелый, т.е. имеет
равномерный спектр в полосе частот Fc.
В случае интегральных систем сообщение
B(t)
входит
в выражения сигнала под знаком интеграла:
не
зависит от частоты. Таким образом,
при прямых системах модуляции шум на
выходе приёмника квазибелый, т.е. имеет
равномерный спектр в полосе частот Fc.
В случае интегральных систем сообщение
B(t)
входит
в выражения сигнала под знаком интеграла:
![]() Так
как
Так
как
![]()
Следовательно СПМ шума на выходе приёмника для интегральных систем можно определить как СПМ производной ξ'(t). На основании известной теоремы о спектре производной
![]() ,
где
G0ξ
(f)
определяется
по формуле (8.28),
если
в последней вместо ds/db
подставить
ds/dψ.
Таким
образом, для интегральных систем СПМ
шума на выходе приёмника
,
где
G0ξ
(f)
определяется
по формуле (8.28),
если
в последней вместо ds/db
подставить
ds/dψ.
Таким
образом, для интегральных систем СПМ
шума на выходе приёмника
![]() (8.29)
(8.29)
т.е. СПМ помехи на выходе приёмника в интегральных системах пропорционален квадрату частоты.
Все
эти результаты справедливы для линейной
модуляции или при произвольной модуляции
для слабых помех, когда можно считать
 .
Они характеризуют так называемые
нормальные ошибки (см.§ 8.5).
.
Они характеризуют так называемые
нормальные ошибки (см.§ 8.5).
Очевидно,
мощность шума на выходе приёмника в
полосе частот от нуля до Fc
будет
![]()
С
другой стороны, мощность Рb
сообщения
на выходе приёмника, равная
 ,
можно
выразить через пик-фактор сообщения
,
можно
выразить через пик-фактор сообщения
![]() .
Полагая,
что сообщение нормировано и
.
Полагая,
что сообщение нормировано и
 ,получаем
,получаем
![]() (8.30)
(8.30)
Тогда отношение мощностей сигнала и шума на выходе приёмника
 (8.31)
(8.31)
а
выражение для выигрыша g
и
обобщённого выигрыша g'
в
соответствии с определениями (8.3)
и
(8.4)
можно записать так:
 (8.32)
(8.32)
Для
гармонического сигнала
 ,
а для телефонного сообщения П≈З.
,
а для телефонного сообщения П≈З.
Используя
теорему Шеннона (см. § 6.7),
можно
найти максимальные возможные значения
выигрыша и обобщённого выигрыша при
заданных параметрах системы связи.
Рассмотрим этот вопрос для наиболее
простого случая, когда непрерывное
сообщение представляет гауссовский
процесс с равномерным спектром в полосе
частот Fc
(квазибелый
шум), а в канале существует аддитивная
помеха в виде квазибелого шума в полосе
F
с
односторонней спектральной плотностью
N0.
Согласно
теореме Шеннона передача сообщения с
заданным значением
![]() возможна
в случае, когда Н'ε(В)
< С'.
Здесь
Н'ε(В)
-
эпсилон-производительность источника,
которая в данном случае согласно (§
6.3.2) равна
Fc
logρ0,
а С' - пропускная способность гауссовского
канала, равная согласно (6.83)
возможна
в случае, когда Н'ε(В)
< С'.
Здесь
Н'ε(В)
-
эпсилон-производительность источника,
которая в данном случае согласно (§
6.3.2) равна
Fc
logρ0,
а С' - пропускная способность гауссовского
канала, равная согласно (6.83)
![]()
где F - полоса пропускания канала и в общем случае F ≠Fc.
В гипотетической идеальной системе связи, в которой полностью используется пропускная способность канала и ρвых = ρ0
Fclog ρвых=Flog(l + ρвх) (8.33)
В
реальных системах связи обычно удаётся
лишь частично использовать пропускную
способность канала. Назовем эффективностью
ηсистемы
связи отношение эпсилон-производительности
источника к пропускной способности
канала, при которой обеспечивается
заданная верность, т.е. ρвых
= ρ0.
Для такой реальной системы вместо
(8.33)
имеем![]() (8.34)
(8.34)
Из выражений (8.33) и (8.34) видно, что при ηF> Fc можно обеспечить высокую верность (большое значение ρвых) при относительно малых ρвх, т.е. получить большой выигрыш g.
Таким
образом, выигрыш достигается в результате
обмена ширины спектра на динамический
диапазон, о чём говорилось в § 1.2.
Большой
выигрыш можно получить только при
большом отношении
![]() Заметим,
что большой выигрыш может иметь место
и при малой эффективности η,
и
наоборот. Следовательно, при оценке
различных систем связи необходимо
учитывать по крайней мере два показателя:
эффективность и помехоустойчивость.
Совокупность этих двух показателей
составляет достаточно полную характеристику
системы.
Заметим,
что большой выигрыш может иметь место
и при малой эффективности η,
и
наоборот. Следовательно, при оценке
различных систем связи необходимо
учитывать по крайней мере два показателя:
эффективность и помехоустойчивость.
Совокупность этих двух показателей
составляет достаточно полную характеристику
системы.
Наилучшей считается система, которая обеспечивает наибольшую помехоустойчивость при заданной эффективности либо наибольшую эффективность при заданной помехоустойчивости.
Для идеальной системы η = 1, и из (8.33) следует
![]() (8-35)
(8-35)
Отсюда при ρ>>1 получаем
![]() (8.36)
(8.36)
Таким образом, в идеальной системе выигрыш g возрастает с увеличением α по экспоненциальному закону. Никакая реальная система не может обеспечить при заданном а более высокую помехоустойчивость, чем идеальная.