

2.10. Основные характеристики шагового двигателя
Угол поворота ротора реактивного ШД, соответствующий одному шагу, называется шаговым углом:
![]() , (2.57)
, (2.57)
где: m – число пространственно сдвинутых обмоток управления;
Zp – число зубцов ротора, Zp = 2p – в машинах с активным ротором;
р – число пар полюсов, Zp = p – с реактивным ротором.
Величина шагового угла определяет быстродействие систем с ШД и является одним из исходных параметров при выборе передаточных отношений редуктора на выходе из системы.
Зависимость
статического момента при различных
значениях тока в обмотках управления
от угла рассогласования (поворота)
ротора
относительно положения начального
устойчивого равновесия определяет
статическую характеристику
![]() и для ШД с симметричным ротором близка
к синусоиде (рис. 2.16):
и для ШД с симметричным ротором близка
к синусоиде (рис. 2.16):
![]() . (2.57)
. (2.57)
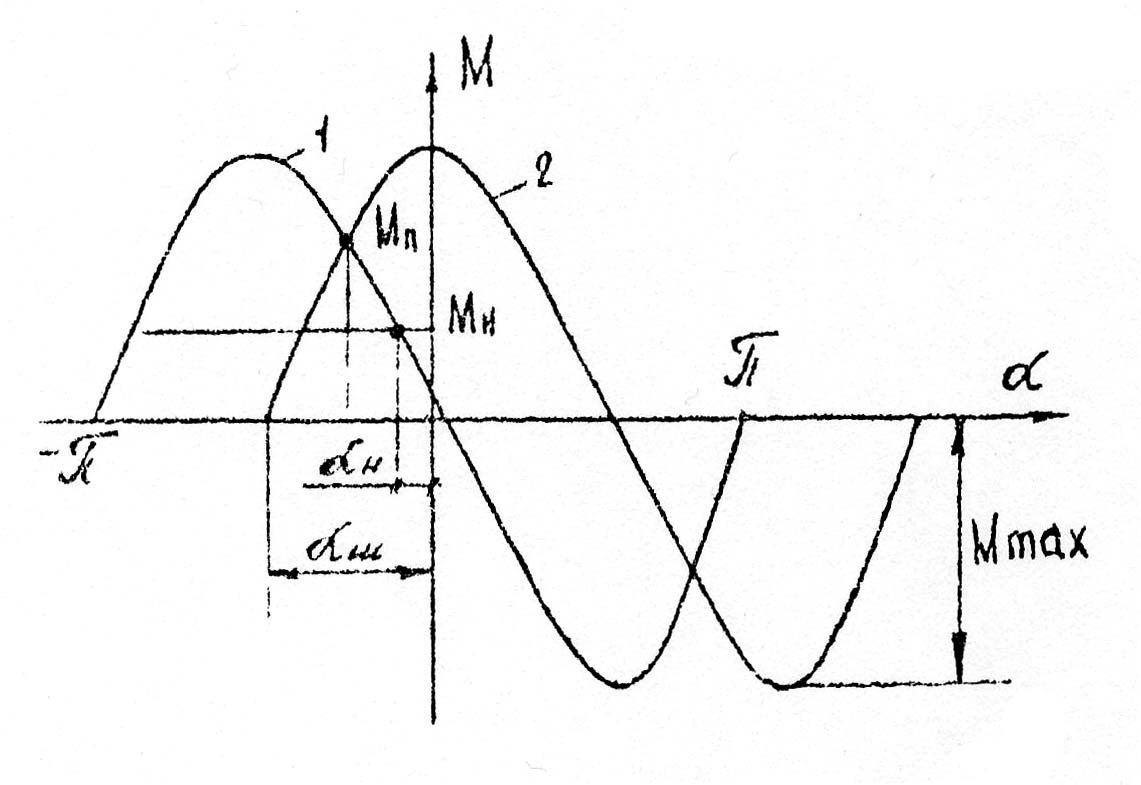
Рис. 2.16. Статическая характеристика ШД
В общем случае при любой форме ротора синхронизирующий момент двигателя можно определить как производную электромагнитной энергии ШД WЭ по углу отклонения ротора от устойчивого положения:
![]() . (2.59)
. (2.59)
Статическая характеристика является одной из основных при оценке работы двигателя. Точка 0 является начальной точкой устойчивого равновесия при отсутствии момента сопротивления. Точки + являются точками неустойчивого равновесия. Неподвижный ротор, находясь в точке О после подачи первого импульса программы и при смещении угловой характеристики на один шаг, имеет запас устойчивости (отрезок АО). Он зависит от величины ш и определяет приемистость двигателя в режиме холостого хода. Чем меньше доля ш от , тем больше запас устойчивости и приемистость двигателя.
При
положении двух статических характеристик,
смещенных друг относительно друга на
величину ш,
можно определить максимальный момент
![]() при
пуске. Пусковой момент шагового двигателя
– это наибольший момент нагрузки, при
котором возможны пуск и дальнейшая
работа двигателя без пропуска импульсов.
Из рис. 2.16 видно, что этот момент равен
ординате точки пересечения кривых
синхронизирующего момента для двух
соседних устойчивых состояний 1 и 2. При
нагрузке, большей
,
ротор не сможет перемещаться под
действием электромагнитных сил из
неподвижного состояния.
при
пуске. Пусковой момент шагового двигателя
– это наибольший момент нагрузки, при
котором возможны пуск и дальнейшая
работа двигателя без пропуска импульсов.
Из рис. 2.16 видно, что этот момент равен
ординате точки пересечения кривых
синхронизирующего момента для двух
соседних устойчивых состояний 1 и 2. При
нагрузке, большей
,
ротор не сможет перемещаться под
действием электромагнитных сил из
неподвижного состояния.
Одним из факторов, определяющих точность работы ШД, является устойчивость. Устойчивость двигателя – это способность его работы без потери шагов.
Зоной статической устойчивости называется интервал угловых положений ротора, в пределах которого ротор возвращается в исходное устойчивое положение после снятия воздействия. Эта зона для ШД с симметричным ротором находится в интервале от до +.
Зона динамической устойчивости определяется с учетом сдвига на шаг кривой синхронизирующего момента при очередном такте переключения обмоток. Она находится в интервале от +ш до ++ш для ШД с симметричным ротором. Шаговый двигатель в процессе останова и работы характеризуется соответственно статической и динамической ошибками. Отклонение оси ротора результирующей намагничивающей силы нагруженного ШД в режиме фиксированного останова под током, называется статической ошибкой ШД. Динамическая ошибка определяется мгновенным значением угла рассогласования движущихся осей результирующей намагничивающей силы и полюсов ротора.
Устойчивость двигателя жестко связана с его предельной рабочей частотой. Максимальная частота импульсов, отрабатываемых двигателем без потерь или добавления шага при пуске из режима фиксированной стоянки под током и останове, называется частотной приемистостью шагового двигателя fпр.
Частота
приемистости зависит от демпфирующих
свойств двигателя, от динамической
добротности шагового двигателя,
определяемой как отношение
![]() ,
где Jр,
Jнагр
– соответственно моменты инерции ротора
двигателя и нагрузки, а также от
электромагнитной постоянной времени
обмоток, которая определяется как
отношение полной индуктивности
соответствующей обмотки к ее активному
сопротивлению. Анализ зависимости
приемистости от перечисленных факторов
очень сложен и часто сводится к
преобразованию системы нелинейных
дифференциальных уравнений к виду,
удобному для решения на ЭВМ.
,
где Jр,
Jнагр
– соответственно моменты инерции ротора
двигателя и нагрузки, а также от
электромагнитной постоянной времени
обмоток, которая определяется как
отношение полной индуктивности
соответствующей обмотки к ее активному
сопротивлению. Анализ зависимости
приемистости от перечисленных факторов
очень сложен и часто сводится к
преобразованию системы нелинейных
дифференциальных уравнений к виду,
удобному для решения на ЭВМ.
Предельная или максимальная частота приемистости fпр0 – это та частота, которая присуща самому двигателю без нагрузки, при приближенных расчетах может быть определена по формуле:
![]() , (2.60)
, (2.60)
где
угловая частота собственных колебаний
ротора шагового двигателя около
устойчивого положения при отсутствии
момента нагрузки
![]() .
.
В ШД с активным ротором постоянные времени обмотки невелики, так как индуктивность обмотки в момент включения определяется главным образом магнитными потоками рассеяния. В ШД индукторного и реактивного типов индуктивности обмоток значительно больше, а кроме того, они зависят от углового положения ротора. Для уменьшения электромагнитной постоянной времени последовательно с обмоткой включаются добавочные сопротивления rдоб с одновременным увеличением (форсировкой) приложенного напряжения:
![]() . (2.61)
. (2.61)
Если
постоянные времени обмоток соизмеримы
с минимальным значением длительности
между двумя соседним переключением
фаз, при котором возможен разгон ротора
без потери устойчивости, то расчеты
приемистости ведут по универсальным
характеристикам, полученным на ЭВМ.
Частота подачи управляющих импульсов,
при которой двигатель начинает отработку
шагов из состояния покоя (![]() ),
называется частотой трогания
),
называется частотой трогания
![]() .
Величина, обратная частоте трогания,
представляет собой период повторения
шагов
.
Величина, обратная частоте трогания,
представляет собой период повторения
шагов
![]() . (2.62)
. (2.62)
Чтобы
двигатель не имел сбоев за счет пропуска
импульсов, должно выполняться условие
![]() ,
где
,
где
![]() -
время необходимое для движения ротора
из состояния покоя до следующего
фиксированного положения. В предельном
случае
-
время необходимое для движения ротора
из состояния покоя до следующего
фиксированного положения. В предельном
случае
![]() . (2.63)
. (2.63)
Область
рабочих частот
![]() двигателя выбирается ниже предельной
частоты
.
двигателя выбирается ниже предельной
частоты
.
Движение ротора шагового двигателя обычно сопровождается колебаниями около положения устойчивого равновесия. При переключении обмоток к ротору двигателя подводиться не только энергия для совершения полезной работы, но и некоторая избыточная энергия, которая увеличивает кинетическую энергию ротора. Степень демпфирования колебаний ротора шагового двигателя зависит от момента сопротивления (сухого трения) и внутреннего электромагнитного демпфирования, обусловленного преобразованием механической энергии ротора в электромагнитную с последующим ее рассеянием в теплоту в активных сопротивлениях обмоток. Электромагнитный момент ШД в общем случае состоит из двух частей: синхронизирующего момента, зависящего от рассогласования между осями магнитных полей статора и ротора, и тормозного момента, пропорционального условной скорости
![]() . (2.64)
. (2.64)
Параметр Д называется коэффициентом внутреннего демпфирования, который учитывается только в ШД с активным ротором.
Под
действием синхронизирующего момента
ротор двигателя при переключении обмоток
начинает движение и в силу инерции будет
совершать затухающие колебания около
нового положения равновесия, смещенного
на угол
![]() (шаг).
Минимальное время
(шаг).
Минимальное время![]() ,
необходимое для поворота ротора на один
шаг, приближенно равно 1/4периода
собственных колебаний
,
необходимое для поворота ротора на один
шаг, приближенно равно 1/4периода
собственных колебаний
![]() :
:
![]() , (2.64)
, (2.64)
где
![]() -
собственная частота колебаний. В
действительности, вследствие качаний
ротора, это время значительно больше.
Наибольшее качание ротора может
возникнуть, если частота переключения
обмоток совпадает с собственной частотой
колебаний ротора, т.е. при резонансной
частоте. При ней энергия, передаваемая
ротору, максимальна, что приводит к
быстрому возрастанию амплитуды качаний
и выпадения ротора ШД из синхронизма,
т.е. максимальное рассогласования
магнитных осей статора и ротора
превосходит полюсное деление. Для
исключения этого явления к ротору
двигателя должен быть приложен тормозной
момент сухого трения.
-
собственная частота колебаний. В
действительности, вследствие качаний
ротора, это время значительно больше.
Наибольшее качание ротора может
возникнуть, если частота переключения
обмоток совпадает с собственной частотой
колебаний ротора, т.е. при резонансной
частоте. При ней энергия, передаваемая
ротору, максимальна, что приводит к
быстрому возрастанию амплитуды качаний
и выпадения ротора ШД из синхронизма,
т.е. максимальное рассогласования
магнитных осей статора и ротора
превосходит полюсное деление. Для
исключения этого явления к ротору
двигателя должен быть приложен тормозной
момент сухого трения.
Качание ротора, сопровождающее отработку одного шага, можно устранить с помощъю старт – стопного метода управления ШД, который позволяет без колебаний при любых видах и величинах нагрузки останавливать ротор ШД в конце каждого шага или группы шагов .
Старт-стопный режим основан на использовании избытка энергии, которая вводится в систему для уменьшения динамических параметров. Для устранения колебаний ротора двигателя энергия, запасенная при разгоне, полностью расходуется при торможении. Возможны два способа торможения в конце шагового перемещения: принудительное и естественное. При принудительном торможении поле статора сдвигается на шаг вперед относительно положения ротора, который из состояния покоя переходит в ускоренное движение. Чтобы обеспечить подход ротора к новому положению с минимальной кинетической энергией, в некоторый момент времени поле статора возвращается в исходное положение, т.е. сдвигается на шаг назад. Ротор попадает в режим торможения и замедляется до полной остановки. После торможения ротора обмотки управления переключаются вторично, сдвигая поле статора на шаг вперед. Этот момент должен соответствовать моменту окончания отработки полного шага, когда статический синхронизирующий момент равен нулю.
При естественном торможении импульсы управления подаются таким образом, чтобы ротор до момента подачи последнего импульса накопил энергию, необходимую для отработки всей серии шагов. Первые (n-1) шагов отрабатываются в ускоряющем электромагнитном поле. Последний n-й шаг отрабатывается по инерции против сил поля. Последний импульс подается при скорости ротора, равной нулю, т.е. работы не производит, а лишь фиксирует положение ротора.
Механической характеристикой ШД (рис. 2.17) называется зависимость момента, развиваемого двигателем, от частоты управляющих импульсов. Характеристика имеет вид падающей кривой, крутизна которой зависит от демпфирующих свойств машины. С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток.

Рис. 2.17. Механическая характеристика ШД
При некоторой предельной частоте fпр момент двигателя становится равным нулю.