

3.6.2 Непосредственные преобразователи частоты
Данный класс преобразователей характерен однократным преобразованием энергии. Потребляемая из сети переменного тока энергия с неизменной частотой и напряжением преобразуется в одном силовом устройстве в энергию переменного тока с регулируемыми по амплитуде и частоте напряжением и током нагрузки, т.е. Un, fn, In = var
Основу НПЧ составляет реверсивный управляемый выпрямитель постоянного тока ТП (рассмотрен ранее).
При изменении синусоидально с определенной частотой управляющего сигнала на выходе ТП получается выпрямленная ЭДС, синусоидально изменяющаяся с той же частотой и приложенную к одной фазе нагрузки (двигателя). Изменяя частоту и амплитуду управляющего сигнала, будет изменяться соответственно частота и амплитуда ЭДС. Для 3-х фазной нагрузки т.о. требуется три комплекта реверсивных ТП, работающих со сдвигом в 120º по выходной частоте НПЧ.
Структурная схема НПЧ имеет вид (риc. 3.55)

Рис. 3.55. Структурная схема НПЧ
Отличие от схемы ТП в том, что имеется три СИФУ и три ВГ по одному на каждую фазу, а также специальное ЗУ, которое формирует в соответствии с заданием на амплитуду Uза и частоту Uзf управляющие напряжения Uy1, Uy2, Uy3, образующие 3-х фазную систему выходной ЭДС.
При 3-х фазной нулевой схеме каждая группа ВГ питает одну фазу нагрузки, состоит из двух подгрупп (1ВГ1, 1ВГ2) и собрана по 3-х фазной реверсивной нулевой схеме. Если не требуется согласование сети и нагрузки, схема может работать без трансформатора. Для ограничения уравнительных токов при совместном управлении ВГ включаются уравнительные реакторы, (рис. 3.56)
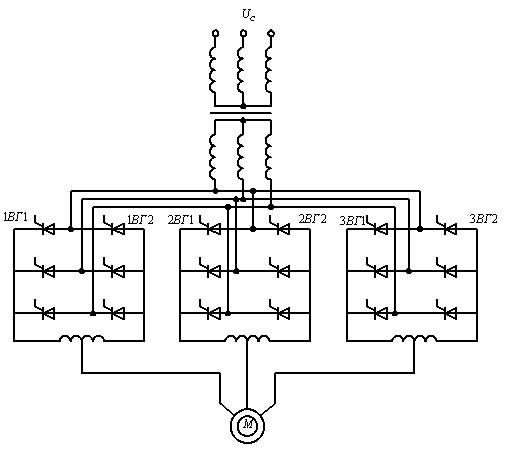
Рис. 3.56. 3х – фазная нулевая схема НПЧ
Мостовая схема применяется при повышении коэффициента мощности и уменьшении пульсации от высших гармоник (рис. 3.57)
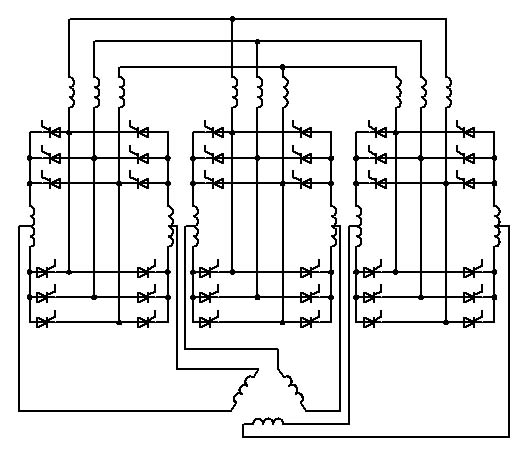
Рис 3.57. 3х – фазная мостовая схема НПЧ
Вентильная группа для каждой фазы состоит из двух подгрупп ВГ1 и ВГ2, образующих 2 моста, включенных встречно-параллельно. Ес ли ВГ подключены параллельно к источнику питания, то фазы должны быть гальванически развязаны друг от друга (рис.3.58). Соединение в Y или Δ приводит к появлению КЗ цепей для питающей сети через соединенные между собой ВГ. Поэтому BГ получают питание от индивидуальных 2-х вторичных обмоток, трансформатора.

Рис. 3.58. Гальваническая развязка фаз.
Большое число ВГ делает эту схему сложной и дорогостоящей. Применяется она для привода большой мощности.
Если управлять ВГ раздельно, то применение реакторов не требуется для обоих схем.
Выходная
ЭДС НПЧ, усредненная на интервале
проводимости (характеристика упр.ВГ):
![]()
С
другой стороны
![]() должна быть синусоидальной формы с
амплитудой
должна быть синусоидальной формы с
амплитудой
![]() и частотой
и частотой
![]()
![]() ; (3.102)
; (3.102)
![]() . (3.103)
. (3.103)
Откуда находим необходимый закон изменения угла открывания вентильной группы одной фазы:
![]() . (3.104)
. (3.104)
Тогда для косинусоидальной формы опорного напряжения:
![]() (3.105)
(3.105)
получим напряжение управления
![]() , (3.106)
, (3.106)
для пилообразной формы опорного напряжения:
![]() ,
(3.107)
,
(3.107)
получим
![]() (3.108)
(3.108)
Задавая на входе СИФУ периодические функции напряжения управления UУ получаем на выходе НПЧ синусодиально изменяющуюся ЭДС (рис. 3.59). При этом частота ЭДС равна частоте напряжения управления, которая в свою очередь определяется соответсвующим задающим напряжением:
![]() . (3.109)
. (3.109)
Амплитуда ЭДС определяется амплитудой Uу
![]() ; (3.110)
; (3.110)
![]() . (3.111)
. (3.111)
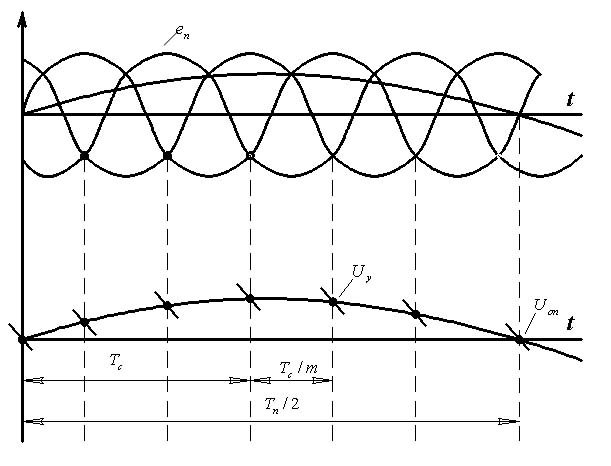
Рис. 3.59. Графики изменения напряжения управления и выходной
для одной фазы нагрузки НПЧ
4. Унифицированные блоки систем регулирования
4.1. Регуляторы
Важной функцией современных систем управления АЭП является регулирование его координат, т. е. поддержание с необходимой точностью требуемых значений тока, момента, ускорения, скорости. Данная функция реализуется с помощью большого числа различных элементов, которые могут быть объединены в отдельные укрупненные блоки управления, выполняющие типовые функции. Выделенные блоки представляют собой унифицированные комплексные элементы, поскольку одни и те же блоки могут применяться в различных системах управления.
Электротехническая промышленность выпускает унифицированную блочную систему регуляторов в аналоговом исполнении – УБСР-АИ и в дискретном исполнении – УБСР-ДИ. Элементной базой блоков служат интегральные микросхемы современных серий, например К553, К511, К155 и др. В состав УБСР-АИ входят задающие, регулирующие, согласующие элементы, датчики напряжения, тока, вспомогательные и специальные элементы, например ячейки питания, множительно-делительные и др. В составе УБСР-ДИ можно выделить задающие, логические и вычислительные, преобразовательно – согласующие блоки. Они представляют собой технически законченную реализацию различных цифровых узлов и устройств.
Функционально-технической единицей в УБСР-АИ и УБСР-ДИ, характеризующейся конструктивной завершенностью, является так называемая ячейка. Она представляет собой печатную плату с микросхемами и выполнена в виде вдвижной конструкции с размерами 128х20 – 40х164 мм. Ячейка может выполнять функцию регулятора, датчика электрических величин, согласующего устройства, логического или вычислительного узла и т.п. Ячейки устанавливаются в общем каркасе, называемом кассетой.
Заполненная ячейками кассета образует следующий уровень функционально-конструктивной интеграции, называемый блоком. Внутри блока ячейки соединяются между собой посредством проводов и разъемов через имеющуюся в блоке объединяющую печатную плату.
Последняя ступень функционально-конструктивной интеграции элементов в системах управления электроприводов – это шкаф управления (закрытая конструкция) или стойка управления (открытая конструкция), которые объединяют ряд блоков, электрически соединяемых между собой внешними проводами – соединителями с разъемами.
Чем больше ячеек и блоков входит в систему управления, тем больше требуется внешних соединений и разъемов, что является недостатком такой системы управления. Поэтому современная тенденция построения блоков заключается в увеличении интеграции функций в рамках одного блока, т.е. в построении комплексных блоков, объединяющих на одной общей плате серии регуляторов, задающих и согласующих элементов.
В данной главе из множества унифицированных устройств управления выделим регуляторы, задающие и согласующие элементы, составляющие функциональную основу системы управления (см. рис. 1.1).
Регулятор выполняет преобразование управляющего сигнала, соответствующее математическим операциям, требуемым по условиям работы системы регулирования. К типовым требуемым операциям относятся следующие преобразования сигнала: пропорциональное, пропорционально-интегральное, пропорционально-дифференциально-интегральное и т. п.
Основу аналогового регулятора составляет операционный усилитель – усилитель постоянного тока с высоким коэффициентом усиления в разомкнутом состоянии. Наибольшее применение находят операционные усилители интегрального исполнения с корпусом круглой и прямоугольной формы (рис. 4.1). Операционный усилитель представляет собой многокаскадную структуру, в которой можно выделить входной дифференциальный усилитель ДУ с инверсным и прямым входами, усилитель напряжения УН, реализующий высокий коэффициент усиления, и усилитель мощности УМ, обеспечивающий необходимую нагрузочную способность операционного усилителя (рис. 4.2).
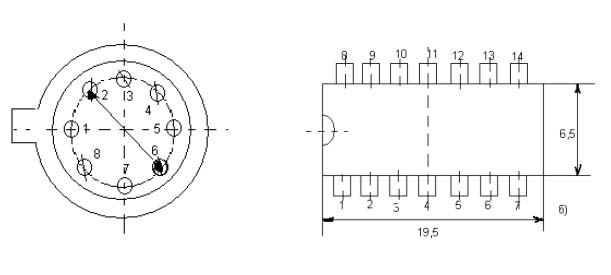
Рис. 4.1. Исполнение корпусов операционных усилителей типов
К140УД6-К140УД8 (а) и К533УД1, К533УД2 (б)
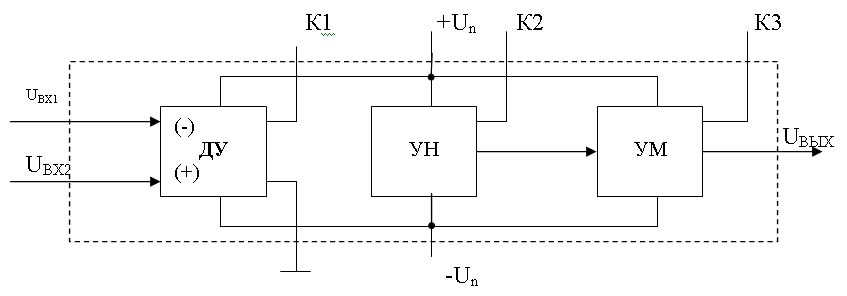
Рис. 4.2. Функциональная схема интегрального операционного усилителя.
Однокристальное малогабаритное исполнение операционного усилителя обусловливает высокую стабильность параметров, что позволяет получить высокий коэффициент усиления на постоянном токе. Выделенные из схемы точки K1, К2, К3 предназначены для подключения внешних корректирующих цепей, снижающих коэффициент усиления на высоких частотах и повышающих устойчивость работы усилителя с обратными связями. Без корректирующих цепей при достаточно больших частотах, когда накопившееся отставание по фазе составит 180˚, знак обратной связи изменяется и при большом коэффициенте усиления операционный усилитель самовозбуждается и входит в режим автоколебаний. Интегральные операционные усилители характеризуются следующими показателями:
дифференциальным коэффициентом усиления в разомкнутом состоянии kу0=103÷105
напряжением питания Uп=±15 В (±12,6 В; ±6,3 В);
сопротивлением нагрузки Rн ≥2÷5 кОм;
входным сопротивлением Rвх0 > 1 кОм;
выходным сопротивлением Rвых ≈ 0,2÷1 кОм;
полосой пропускания f ≈ 1 мГц.
Дифференциальный каскад операционного усилителя имеет два входа управления: прямой с потенциалом Uу,п и инверсный с потенциалом Uу,и (рис. 4.3, а). Выходное напряжение усилителя определяется произведением коэффициента усиления на разность потенциалов входов усилителя, т.е.
![]() .
(4.1)
.
(4.1)
Относительно входных напряжений Uвх,п и Uвх,и выходное напряжение определяется разностью
![]() , (4.2)
, (4.2)
где коэффициенты усиления по прямому kу,п и инверсному kу,и входам зависят от схемы включения операционного усилителя.
Пусть Uвх и=0,
и, тогда операционный усилитель включен
по схеме прямого усиления с отрицательной
связью (рис. 4.3, б). В этой схеме
![]() , и согласно (4.1)
, и согласно (4.1)
![]() .
.
Откуда
 (4.3)
(4.3)
и с учетом факта,
что
![]()
![]() . (4.4)
. (4.4)
При R2=R3=0 kу,п=1 и Uвых=Uвх,п=Uу,п, т.е. усилитель работает в режиме эмиттерного повторителя, имеющего высокое входное и низкое выходное сопротивления.

Рис.4.3. Схемы включения операционного усилителя:
а – общая; б – по прямому входу; в – по инверсному входу
Пусть
Uвх,п=0,
тогда операционный усилитель включен
по схеме инверсного усиления с
отрицательной связью (рис.
4.3,в). Для
данной схемы
![]() ,
Uу,п=0
и справедлива система уравнений
,
Uу,п=0
и справедлива система уравнений
![]()
Разрешая систему уравнений относительно входного и выходного напряжений, получаем выражение для коэффициента усиления по инверсному входу операционного усилителя с отрицательной обратной связью
![]() (4.5)
(4.5)
Так
как
![]() ,
то
,
то
![]() .
(4.6)
.
(4.6)
Для построения различных регуляторов используется обычно схема включения операционного усилителя с инверсным входом. Необходимые передаточные функции регуляторов могут быть получены за счет комплексных активно-емкостных сопротивлений в цепи обратной связи Z0, c и во входных цепях (Zвх1, Zвх2) (рис. 4.4). В соответствии со схемой рис. 4.4 и с учетом допущения U0/Rвх0=0 справедливо равенство
![]() (4.7)
(4.7)
Откуда
![]() . (4.8)
. (4.8)
Следовательно, передаточная функция усилителя относительно одного входа (здесь и далее передаточная функция операционного усилителя записывается без учёта инверсии выходного напряжения) получит вид

Рис.4.4. Общая схема включения регулятора
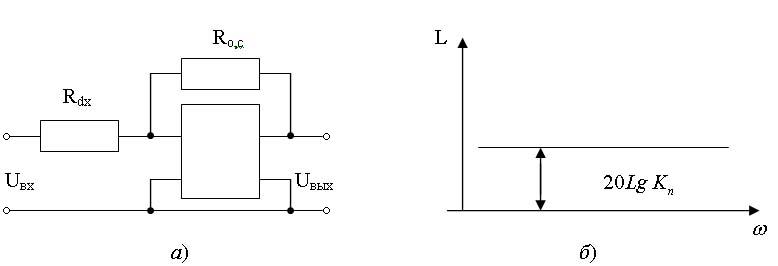
Рис.4.5. Схема (а) и ЛАЧХ П-регулятора (б)
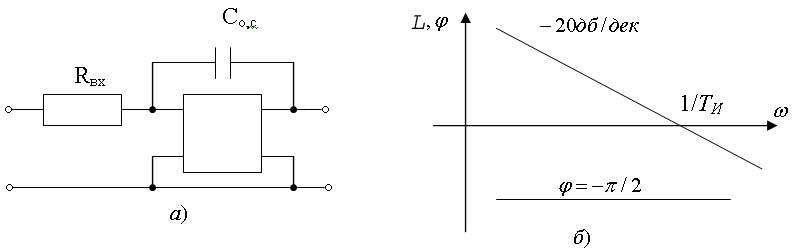
Рис.4.6. Схема (а), ЛАЧХ и ЛФЧХ И-регулятора (б)
![]() . (4.9)
. (4.9)
В зависимости от вида передаточной функции операционный усилитель рассматривается как тот или иной функциональный регулятор.
Рассмотрим передаточные функции, схемы включения и логарифмические частотные характеристики (ЛЧХ) типовых регуляторов.
Пропорциональный регулятор (П-регулятор) представляет собой усилитель с жесткой обратной связью (рис. 4.5, а). Его передаточная функция
![]() ,
(4.10)
,
(4.10)
где
![]() – коэффициент
усиления П-регулятора.
– коэффициент
усиления П-регулятора.
Согласно (4.10) в пределах полосы пропускания ЛАЧХ параллельна оси угловых частот ω, а фаза равна нулю (рис. 4.5, б).
Интегральный регулятор (И-регулятор) получается включением конденсатора в обратную связь (рис. 4.6, а), при этом выполняется функция интегрирования
![]() ,
(4.11)
,
(4.11)
где
![]() – постоянная интегрирования, с.
– постоянная интегрирования, с.
Фазовый сдвиг выходного сигнала равен – π/2, а ЛАЧХ имеет наклон – 20 дБ/дек (рис. 4.6 б).
Пропорционально-интегральный регулятор (ПИ-регулятор) представляет собой параллельное соединение П- и И-регуляторов, т.е.
![]() . (4.12)
. (4.12)
Получить
данную передаточную функцию можно на
одном усилителе включением в его обратную
связь активно-емкостного сопротивления
![]() (рис.
4.7, а).
Тогда согласно
(4.9)
(рис.
4.7, а).
Тогда согласно
(4.9)
![]() , (4.13)
, (4.13)
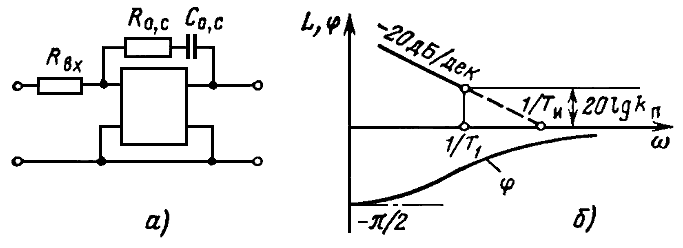
Рис. 4.7. Схема (а), ЛАЧХ и ЛФЧХ ПИ-регулятора (б)
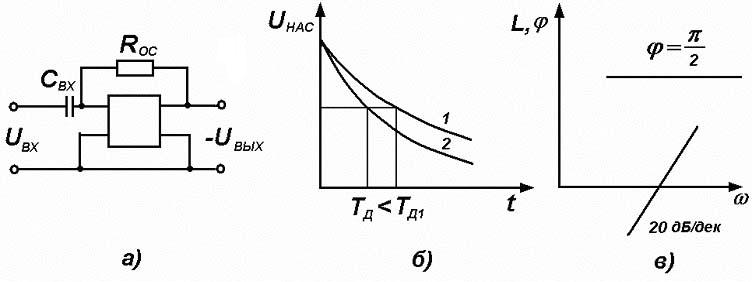
Рис.4.8.Д-регулятор
где
![]() ;
;
![]() ;
.
;
.
Логарифмические частотные характеристики ПИ-регулятора имеют вид, показанный на рис. 4.7, б.
Д
– регулятор
(дифференциальный) получается включением
конденсатора в цепь
![]() (рис. 4.8)
(рис. 4.8)
![]() , (4.14)
, (4.14)
где
![]() .
.
Пропорционально-дифференциальный регулятор (ПД-регулятор) объединяет функции П- и Д-регуляторов, т.е.
![]() (4.15)
(4.15)
Передаточная функция (4.15) может быть получена за счет параллельного подключения конденсатора к входному резистору (рис. 4.9, а), тогда
 , (4.16)
, (4.16)
где
![]() ;
.
;
.
Логарифмические
частотные характеристики ПД-регулятора
приведены на рис.
4.9, б.
Однако работа данной схемы сопровождается
значительными высокочастотными
помехами, для которых конденсатор
![]() представляет собой сопротивление,
близкое к нулю. Для повышения
устойчивости работы ПД-регулятора
последовательно с конденсатором
включается дополнительный резистор
с небольшим сопротивлением
представляет собой сопротивление,
близкое к нулю. Для повышения
устойчивости работы ПД-регулятора
последовательно с конденсатором
включается дополнительный резистор
с небольшим сопротивлением
![]() ,
которое ограничивает токи высокочастотных
помех.
,
которое ограничивает токи высокочастотных
помех.
Передаточная
функция регулятора с
![]() имеет вид
имеет вид
![]() , (4.17)
, (4.17)
где
![]() .
.
При
![]() частотные характеристики, соответствующие
(4.16) и
(4.17),
практически не отличаются друг от друга.
частотные характеристики, соответствующие
(4.16) и
(4.17),
практически не отличаются друг от друга.
Пропорционально – интегрально - дифференциальный регулятор (ПИД – регулятор) выполняет одновременно действия трех регуляторов – П – И – Д
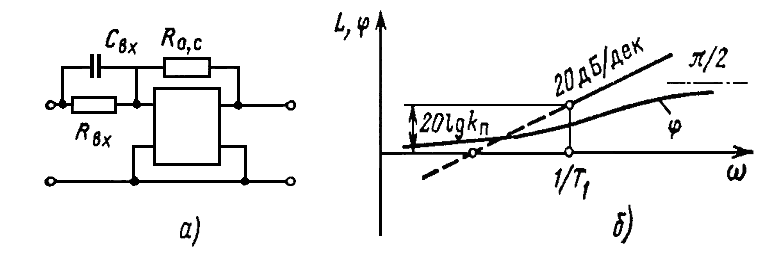
Рис. 4.9. Схема (а), ЛАЧХ и ЛФЧХ ПД-регулятора (б)
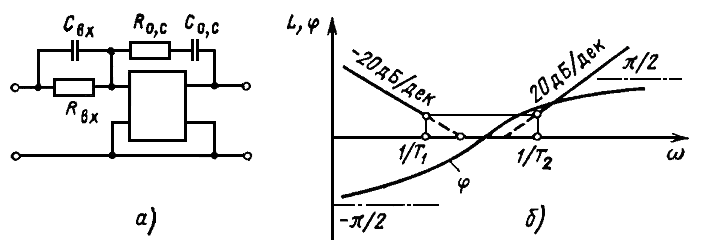
Рис. 4.10. Схема (а), ЛАЧХ и ЛФЧХ ПИД-регулятора (б)
![]() .
(4.18)
.
(4.18)
Если
на параметры
![]() ,
,
![]() и
и
![]() наложить ограничение
наложить ограничение
![]() ,
(4.19)
,
(4.19)
то передаточную функцию (4.18) можно представить в виде
![]() ,
(4.20)
,
(4.20)
где
![]() ;
;
![]() .
.
ПИД-регулятор с передаточной функцией (4.13) представляет собой последовательное включение ПД- и ПИ-регуляторов и может быть выполнен на одном усилителе с
![]()
и
![]() (рис.4.10,
а).
(рис.4.10,
а).
Тогда
![]() ,
,
где
;
![]() ;
;
![]() .
.
Логарифмические частотные характеристики регулятора, соответствующие (4.20), приведены на рис. 4.10, б.
Для
снижения уровня помех на выходе регулятора
и повышения устойчивости его работы
последовательно с конденсатором
![]() может быть включен дополнительный
резистор с небольшим сопротивлением,
как это было отмечено для ПД –
регулятора.
может быть включен дополнительный
резистор с небольшим сопротивлением,
как это было отмечено для ПД –
регулятора.
Для ПИД-регулятора
;
![]() ;
;
![]() .
.

Рис.4.11. Аппериодическое звено 1-го порядка (ИА – регулятор)
Передаточная функция ПИД-регулятора
![]() .
(4.21)
.
(4.21)
Используя
схемы включения операционного усилителя,
можно получить различные необходимые
для управления передаточные функции
регуляторов. Например, при
![]() в схеме рис. 4.4. получим передаточную
функцию инерционного апериодического
звена (ИА-регулятора)
в схеме рис. 4.4. получим передаточную
функцию инерционного апериодического
звена (ИА-регулятора)
![]() .
(4.22)
.
(4.22)
Если принять
![]() ;
;
![]() ;
,
;
,
то получим передаточную функцию (ПИ)2-регулятора
![]() . (4.23)
. (4.23)
На основе операционных усилителей могут выполняться не только регуляторы, но и другие функциональные блоки, например задающие устройства, формирующие входной сигнал в системе управления.
Типовым
задающим блоком в системах управления
электропривода является интегрозадающее
устройство
или задатчик
интенсивности
(ЗИ). Задача ЗИ
–
сформировать плавное изменение
задающего сигнала при переходе от
одного уровня к другому, а именно создать
линейное нарастание и спадание
сигнала с требуемым темпом. На рис.
4.12
представлена структурная схема ЗИ,
состоящая из трех операционных усилителей.
Первый усилитель А1, работающий без
обратной связи, но с ограничением по
выходному напряжению
![]() ,
имеет характеристику прямоугольной
формы (рис.
4.13, а).
Второй операционный усилитель А2 работает
интегратором с постоянным темпом
интегрирования
,
имеет характеристику прямоугольной
формы (рис.
4.13, а).
Второй операционный усилитель А2 работает
интегратором с постоянным темпом
интегрирования
![]() . (4.24)
. (4.24)
Темп интегрирования может регулироваться изменением Rвх2. Третий усилитель УЗ формирует отрицательное напряжение обратной связи

Рис. 4.12. Схема интегрозадающего устройства
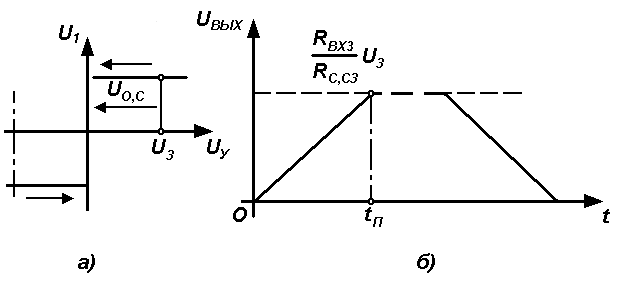
Рис. 4.13. Характеристика входного усилителя (а) и диаграмма
изменения выходного напряжения (б) интегрозадающего устройства
![]() .
.
При
подаче на вход задающего напряжения
![]() выходное напряжение линейно возрастает
согласно
(4.25).
выходное напряжение линейно возрастает
согласно
(4.25).
В
момент времени
![]() ,
когда
,
когда
![]() ,
интегрирование прекращается, и выходное
напряжение, достигнув значения
,
интегрирование прекращается, и выходное
напряжение, достигнув значения
![]() остается далее неизменным. При снятии
с входа задающего напряжения (
остается далее неизменным. При снятии
с входа задающего напряжения (![]() )
происходит процесс линейного
уменьшения выходного напряжения до
нулевого значения (рис.
4.13, б).
)
происходит процесс линейного
уменьшения выходного напряжения до
нулевого значения (рис.
4.13, б).