

5.3.4. Тахометрический мост
Вместо
тахогенераторов для двигателей
постоянного тока в качестве датчиков
скорости используют тахометрические
мостовые схемы (тахомосты). На рис. 5.25
изображена простая и распространенная
схема тахомоста. В одно из плеч тахомоста
включен якорь двигателя, имеющий
сопротивление
![]() .
Другие плечи моста образованы
сопротивлением обмотки дополнительных
полюсов и потенциометров
.
Другие плечи моста образованы
сопротивлением обмотки дополнительных
полюсов и потенциометров
![]() .
Конденсатор С вместе с сопротивлениями
схемы образуют фильтр. На рис. 5.26 показано
эквивалентная схема тахомоста без учета
индуктивности якорной цепи двигателя.
Установившейся режим работы схемы
описывается следующими уравнениями:
.
Конденсатор С вместе с сопротивлениями
схемы образуют фильтр. На рис. 5.26 показано
эквивалентная схема тахомоста без учета
индуктивности якорной цепи двигателя.
Установившейся режим работы схемы
описывается следующими уравнениями:
![]() , (5.47)
, (5.47)
где
![]() ; (5.48)
; (5.48)
![]() , (5.49)
, (5.49)
откуда
![]() . (5.50)
. (5.50)
Если
![]() , (5.51)
, (5.51)
т.е.
при
![]()
мост
уравновешен и
![]() . (5.52)
. (5.52)
При постоянном магнитном потоке двигателя
 . (5.53)
. (5.53)
Согласно схеме на рис. 5.26 дифференциальное уравнение тахомоста имеет вид
![]() , (5.54)
, (5.54)
где постоянная времени фильтра.
С
учетом соотношения
![]() получим
получим
![]() . (5.55)
. (5.55)
К недостатком тахомоста относятся малый коэффициент передачи и невысокая точность измерения скорости (из-за непостоянства сопротивления щеточного контакта и изменения сопротивления обмотки двигателя при их нагреве).

Рис. 5.25. Тахометрический мост Рис. 5.26. Эквивалентная схема тахомоста
5.3.5. Цифровые датчики скорости
В современных системах АЭП с большими диапазонами регулирования скорости и высокими требованиями к ее стабилизации точность ТГ может оказаться недостаточной. Для таких систем используются цифровые датчики скорости (ЦДС). Функционально в ЦДС можно выделить две основные части: импульсный преобразователь скорости—датчик импульсов ДИ, преобразующий угловую скорость вала в импульсы с частотой f, пропорциональной скорости, и кодовый преобразователь—счетчик импульсов СИ, формирующий на интервале измерения Т цифровой код An выходной величины датчика скорости (рис. 5.27).
Датчик
импульсов может быть выполнен на основе
индуктосина или фотоэлектрического
кодового диска. В любом варианте датчик
импульсов вырабатывает две серии
импульсов, сдвинутых по фазе на
![]() ,
которые используются для определения
угловой скорости и ее знака. На рис.
5.28 изображен
кодовый диск фотоэлектрического
датчика импульсов. На двух дорожках
расположены пропускающие свет щели.
Свет от источников ИС1 и ИС2 через щели
попадает на фотодиоды ВL1
и BL2,
которые при этом открыты и пропускают
ток. Когда щель выходит из луча света,
фотодиоды запирают цепь. При вращении
диска с угловой скоростью ВL1
и
BL2 дают
чередование максимального и минимального
сигналов с частотой
,
которые используются для определения
угловой скорости и ее знака. На рис.
5.28 изображен
кодовый диск фотоэлектрического
датчика импульсов. На двух дорожках
расположены пропускающие свет щели.
Свет от источников ИС1 и ИС2 через щели
попадает на фотодиоды ВL1
и BL2,
которые при этом открыты и пропускают
ток. Когда щель выходит из луча света,
фотодиоды запирают цепь. При вращении
диска с угловой скоростью ВL1
и
BL2 дают
чередование максимального и минимального
сигналов с частотой

Рис. 5.27. Структурная схема цифрового датчика скорости

Рис. 5.28. Кодовый диск фотоэлектрического
датчика импульсов
![]() , (5.56)
, (5.56)
где
![]() -
импульсная емкость кодового диска
— число
импульсов на один оборот диска.
-
импульсная емкость кодового диска
— число
импульсов на один оборот диска.
Токовый
сигнал фотодиода изменяется по форме
и амплитуде при изменении скорости
вращения. Поэтому для получения стабильных
сигналов с неизменными амплитудой и
продолжительностью в состав датчика
импульсов входит узел формирования
выходных импульсов (рис.
5.29). В
усилителе А токовый сигнал фотодиода
ВL1
усиливается и симметрируется по
полярности Uу1.
Усилитель,
собранный на транзисторах VT1
и VT2
и работающий с использованием положительной
связи в релейном режиме, дает на выходе
прямоугольные импульсы U1
с постоянной амплитудой, равной Un,
но с переменной продолжительностью.
Выходной импульс
![]() с неизменными и амплитудой, и
продолжительностью t
формируется с помощью одновибратора.
Диаграмма работы описанного узла
приведена на рис.
5.30. Аналогичный
узел имеется и для импульсов второй
дорожки кодового диска с фотодиодом
BL2.
Для каждого направления вращения в
датчике импульсов имеется свой выходной
канал.
с неизменными и амплитудой, и
продолжительностью t
формируется с помощью одновибратора.
Диаграмма работы описанного узла
приведена на рис.
5.30. Аналогичный
узел имеется и для импульсов второй
дорожки кодового диска с фотодиодом
BL2.
Для каждого направления вращения в
датчике импульсов имеется свой выходной
канал.
Выделение
импульсов на каналах положительной
скорости (направление «вперед»,
![]() )
или отрицательной скорости (направление
«назад»,
)
или отрицательной скорости (направление
«назад»,
![]() )
осуществляется логическим узлом
(рис.
5.31). На
первом выходном канале импульсы
появляются
при таком направлении вращения, при
котором сигнал U2
опережает
по фазе на
сигнал U1,
и элемент совпадения И1
открыт для
импульсов
)
осуществляется логическим узлом
(рис.
5.31). На
первом выходном канале импульсы
появляются
при таком направлении вращения, при
котором сигнал U2
опережает
по фазе на
сигнал U1,
и элемент совпадения И1
открыт для
импульсов
![]() .
При другом направлении вращения,
когда U2
отстает по фазе на
от
U1,
элемент совпадения И2
открыт для импульсов
.
При другом направлении вращения,
когда U2
отстает по фазе на
от
U1,
элемент совпадения И2
открыт для импульсов
![]() ,которые
поступают на второй выходной канал
.
,которые
поступают на второй выходной канал
.

Рис. 5.29. Схема датчика импульсов
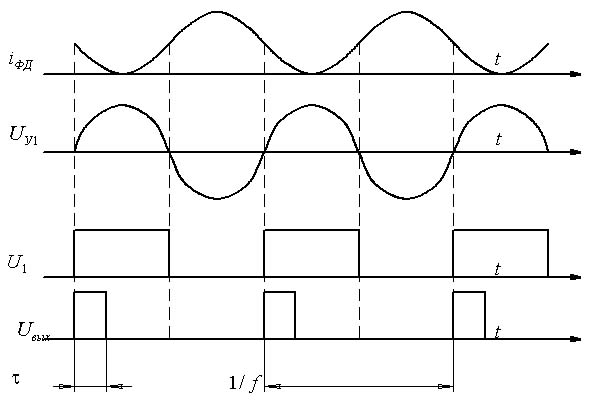
Рис. 5.30. Диаграмма формирования выходного сигнала
датчика импульсов

Рис. 5.31. Схема разделения по времени
импульсов двух каналов в датчике скорости
Формирование цифрового кода на выходе датчика скорости с помощью счетчика может выполняться двояко. На заданном периоде измерения Т счетчик может подсчитывать число импульсов, которое будет характеризовать среднее значение скорости:
![]() .
(5.57)
.
(5.57)
Так
как младшему разряду датчика соответствует
один импульс, то разрешающая способность
ЦДС составляет
N : 1, а
точность измерения
![]() .
Очевидно, дискретность по скорости
датчика, об/с, определится величиной
.
Очевидно, дискретность по скорости
датчика, об/с, определится величиной
![]() .
(5.58)
.
(5.58)
Таким
образом, точность ЦДС тем выше, чем
больше измеряемая скорость и период
измерения. Например,
при
![]() импульсов/об,
импульсов/об,
![]() ,
с погрешность ЦДС составит для
,
с погрешность ЦДС составит для
![]()
![]() а для
а для
![]()
![]() .
.
Увеличение значения Т для уменьшения погрешности при низких скоростях нежелательно, так как при этом возрастает дискретность по времени и увеличивается расхождение между средним и мгновенным значениями скорости, что может затруднить использование ЦДС в системах управления.
Другой вариант формирования цифрового кода скорости состоит в определении интервала времени между двумя импульсами путем подсчета числа высокочастотных опорных импульсов, умещающихся на измеряемом интервале. Данный способ имеет, напротив, максимальную разрешающую способность на самых низких скоростях, когда период следования импульсов максимален и содержит наибольшее число опорных импульсов. Однако высокая точность датчика при низких скоростях относится также лишь к среднему за измеряемый интервал значению скорости. При повышении скорости точность данного ЦДС снижается.
Рассмотренные варианты ЦДС обеспечивают высокую точность измерения скорости, и тем большую, чем продолжительней период измерения. Однако данный период измерения вносит в систему управления с ЦДС дискретность по времени, которая вносит искажения в работу высокодинамичных систем. Поэтому для снижения дискретности по времени в быстродействующих системах с управлением по интегралу сигнала рассогласования интегрирование разности скоростей выполняется подсчетом разности непосредственно числа импульсов с задающего устройства и с датчика импульсов с помощью реверсивного счетчика.