

5.2.2. Потенциометрические датчики
Эти датчики преобразуют угловое или линейное перемещение движка в выходное напряжение. На рис. 5.6 представлена схема потенциометрического датчика углового перемещения.
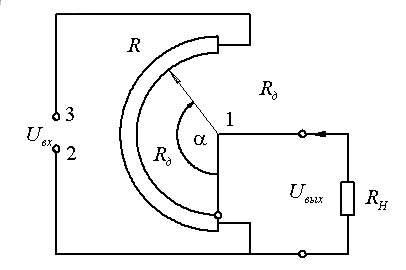
Рис 5.6 Потенциометрический датчик углового перемещения
На
выводы 2-3 подается входное постоянное
или переменное напряжение. Применяются
проволочные и пленочные потенциометры.
Проволочные делятся на одно- и
многопроволочные, а пленочные – на
металлопленочные и полупроводниковые.
На рис. 5.7,а показана схема потенциометрического
датчика линейного перемещения. С учетом
регулирования характеристика этих
датчиков нелинейная, (рис. 5.7,б), ее
нелинейность тем больше, чем меньше
![]() ,
,
где
- активное сопротивление нагрузки; R
- полное сопротивление потенциометра.
При
![]() нелинейность характеристики составляет
3-0,1% соответственно.
нелинейность характеристики составляет
3-0,1% соответственно.

Рис. 5.7. Потенциометрический датчик линейного перемещения (а),
и ее характеристика (б)
На базе датчика углового перемещения строятся потенциометрические измерители углового рассогласования (рис. 5.8). Потенциометры ПД (датчик) и ПП (приемник) включены по компенсационной схеме.
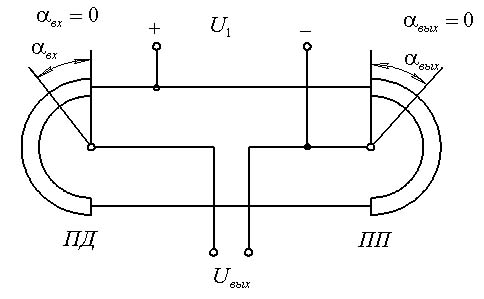
Рис. 5.8. Потенциометрические измерители
углового рассогласования
Щетки
потенциометров крепятся на осях в
центрах каркасов и скользят по защищенным
поверхностям обмотки. К потенциометрам
подведено напряжение питания
![]() .
.
Положение
щетки ПД определяет угол поворота
командного вала - входной угол
![]() .
Положение щетки ПП определяет угол
поворота исполнительного вала (выходной
угол
.
Положение щетки ПП определяет угол
поворота исполнительного вала (выходной
угол
![]() ),
так как потенциометр ПП механически
связан с исполнительным валом привода.
),
так как потенциометр ПП механически
связан с исполнительным валом привода.
Выходное напряжение измерителя рассогласования (ИР) равно разности напряжений, снимаемых с обоих потенциометров:
![]() . (5.32)
. (5.32)
Здесь
![]() и
и
![]() - коэффициенты передачи (чувствительности)
соответственно датчика и приемника:
- коэффициенты передачи (чувствительности)
соответственно датчика и приемника:
![]() ; (5.33)
; (5.33)
![]() , (5.34)
, (5.34)
где
![]() - полные углы намотки потенциометров
ПД и ПП.
- полные углы намотки потенциометров
ПД и ПП.
Если
![]() ,
то
,
то
![]()
Следовательно,
![]() , (5.35)
, (5.35)
т.е.
выходное напряжение ИР по величине
прямо пропорционально углу рассогласования
![]() ,
а знак
определяется знаком
.
,
а знак
определяется знаком
.
Напряжение
![]() при согласованном положении командного
и исполнительного валов
при согласованном положении командного
и исполнительного валов
![]() .
.
Схема ИР по рис. 5.8 может работать лишь в ограниченном диапазоне изменения углов и . Для режима многооборотного вращения применяют кольцевые потенциометры, соединяемые, в частности, по четырехпроводной схеме рис. 5.9.

Рис. 5.9. Кольцевой потенциометр.
Чувствительность
потенциометрического датчика
![]() ,
,
где x
- линейное перемещение движка, мм,
соответствующее углу поворота .
Величина
![]() .
.
Точность проволочных
датчиков может составлять 0,05%; их
недостаток - ступенчатость характеристики
![]() из-за дискретного изменения сопротивления
при перемещении щетки движения. Класс
точности пленочных потенциометров
0,01%.
из-за дискретного изменения сопротивления
при перемещении щетки движения. Класс
точности пленочных потенциометров
0,01%.
Стабильность
датчиков характеризуется температурным
коэффициентом, который для проволочных
датчиков составляет
![]() ,
а непроволочных
,
а непроволочных
![]() .
.
Для обеспечения стабильности работы датчики должны иметь сопротивление, превышающее 1000 Ом.
Срок службы
потенциометрических датчиков в среднем
составляет
![]() циклов при частоте вращения движка
100-150 об/мин.
циклов при частоте вращения движка
100-150 об/мин.