

Схемы манипуляторов
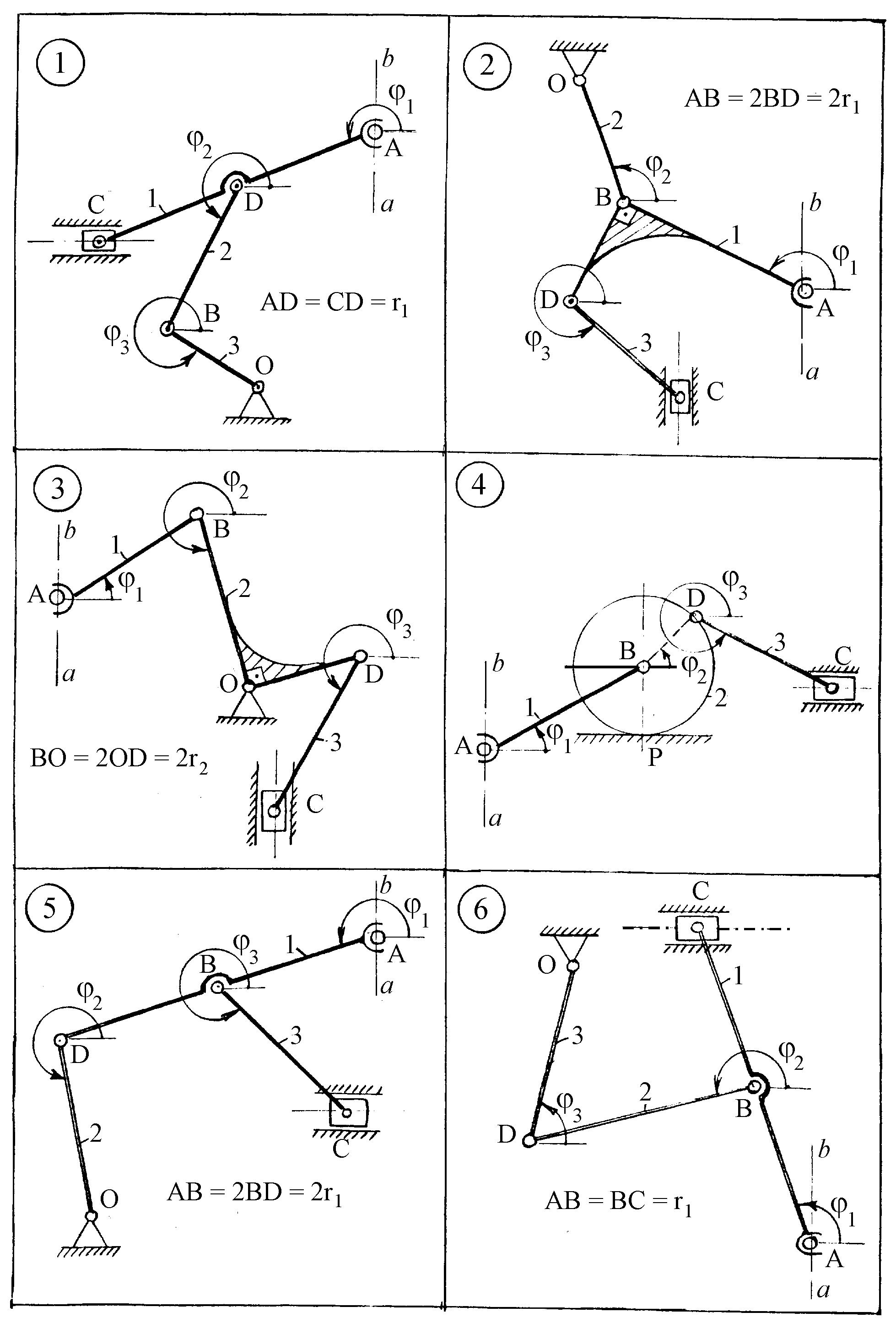



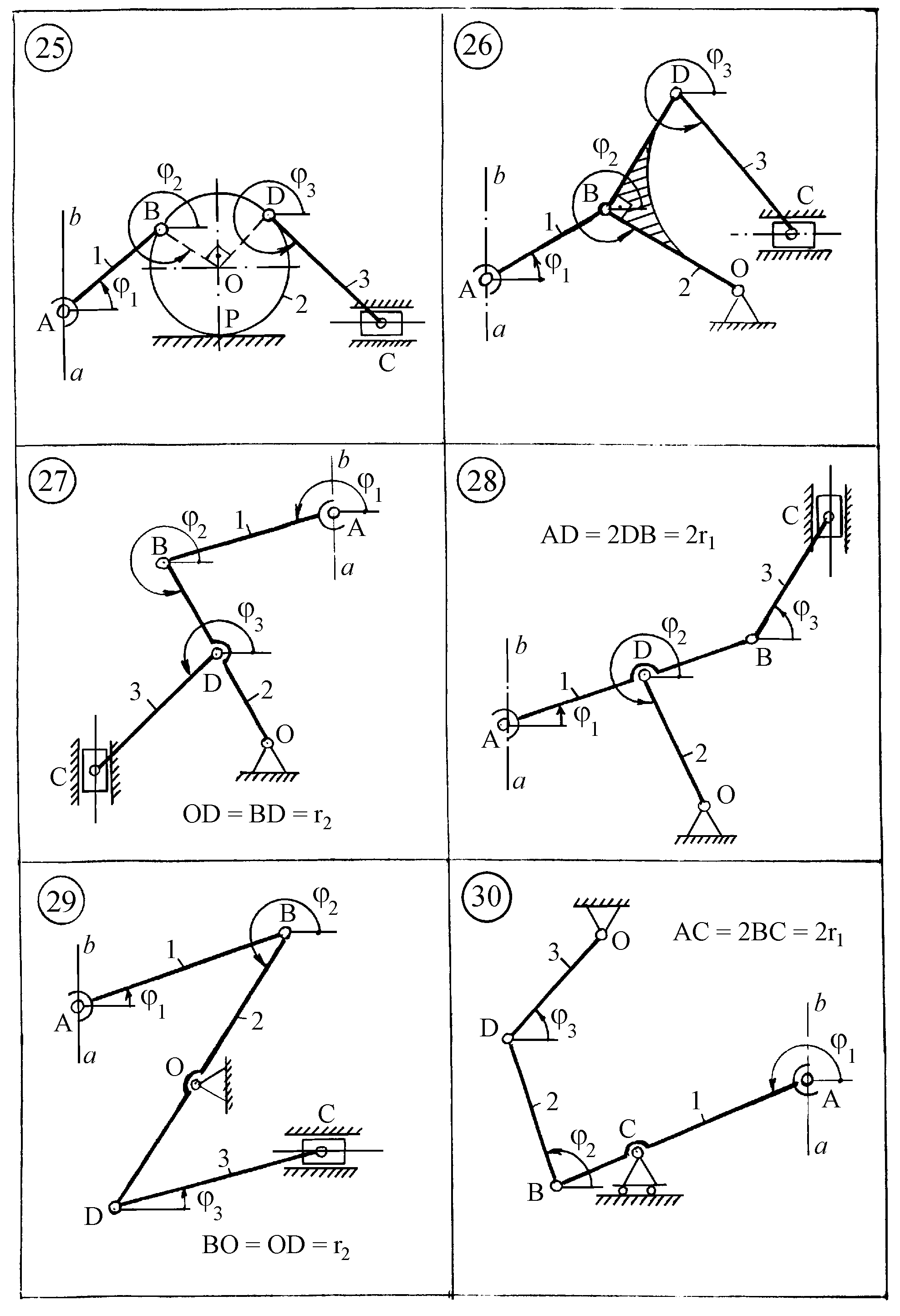
Таблица К4.1
Вариант |
r1, м |
r2, м |
r3, м |
1, рад |
2, рад |
3, рад |
1 |
0,8 |
0,7 |
0,7 |
3,1 |
3,7 |
5,5 |
2 |
0,4 |
0,6 |
0,6 |
2,5 |
2,0 |
2,0 |
3 |
0,8 |
0,4 |
0,8 |
0,5 |
5,2 |
4,2 |
4 |
0,9 |
0,5 |
0,8 |
0,4 |
0,7 |
5,7 |
5 |
0,4 |
0,6 |
0,6 |
3,0 |
4,9 |
5,8 |
6 |
0,7 |
0,7 |
0,6 |
2,0 |
3,4 |
1,3 |
7 |
0,9 |
0,4 |
0,8 |
3,1 |
5,9 |
0,6 |
8 |
0,4 |
0,7 |
0,7 |
0,5 |
0,5 |
5,1 |
9 |
0,9 |
0,4 |
0,8 |
3,7 |
0,4 |
5,8 |
10 |
0,4 |
0,6 |
0,6 |
2,8 |
3,6 |
3,7 |
11 |
0,8 |
0,5 |
0,6 |
5,8 |
3,2 |
4,7 |
12 |
0,4 |
0,6 |
0,7 |
1,9 |
0,7 |
0,4 |
13 |
0,4 |
0,6 |
0,6 |
3,2 |
3,9 |
5,4 |
14 |
0,9 |
0,4 |
0,7 |
0,5 |
5,0 |
5,2 |
15 |
0,9 |
0,5 |
0,7 |
2,8 |
4,5 |
1,8 |
16 |
0,5 |
0,7 |
0,7 |
0,4 |
4,2 |
5,0 |
17 |
0,9 |
0,5 |
0,7 |
2,6 |
0,7 |
2,0 |
18 |
0,4 |
0,6 |
0,5 |
0,4 |
5,0 |
5,8 |
19 |
0,53 |
0,47 |
0,47 |
0,57 |
5,77 |
5,17 |
20 |
0,4 |
0,5 |
0,6 |
1,1 |
2,5 |
3,7 |
21 |
0,5 |
0,7 |
0,7 |
3,1 |
2,5 |
2,5 |
22 |
0,9 |
0,5 |
0,8 |
0,3 |
0,4 |
5,1 |
23 |
0,4 |
0,6 |
0,7 |
3,3 |
2,1 |
2,2 |
24 |
0,4 |
0,7 |
0,7 |
3,1 |
3,0 |
4,2 |
25 |
0,9 |
0,5 |
0,8 |
0,5 |
5,6 |
5,5 |
26 |
0,8 |
0,6 |
0,7 |
0,5 |
5,7 |
5,6 |
27 |
0,9 |
0,5 |
0,7 |
3,0 |
5,1 |
4,2 |
28 |
0,5 |
0,7 |
0,7 |
0,5 |
5,2 |
1,2 |
29 |
0,9 |
0,5 |
0,8 |
0,4 |
4,2 |
0,5 |
30 |
0,6 |
0,6 |
0,6 |
3,0 |
2,1 |
0,7 |
Размеры звеньев: АВ = r1 = 0,7 м, BD = r2 = 0,5 м, DC = r3 = 0,8 м, значения углов, определяющих положения звеньев манипулятора в начальный момент времени (t = 0): 1 (0) = 0,5 рад; 2 (0) = 0,3 рад; 3 (0) = 1,0 рад.
Порядок расчета. Исходные соотношения для расчета получим, воспользовавшись векторным описанием геометрии механизма, расчленив его на две группы звеньев (рис. К4б и рис. К4в).
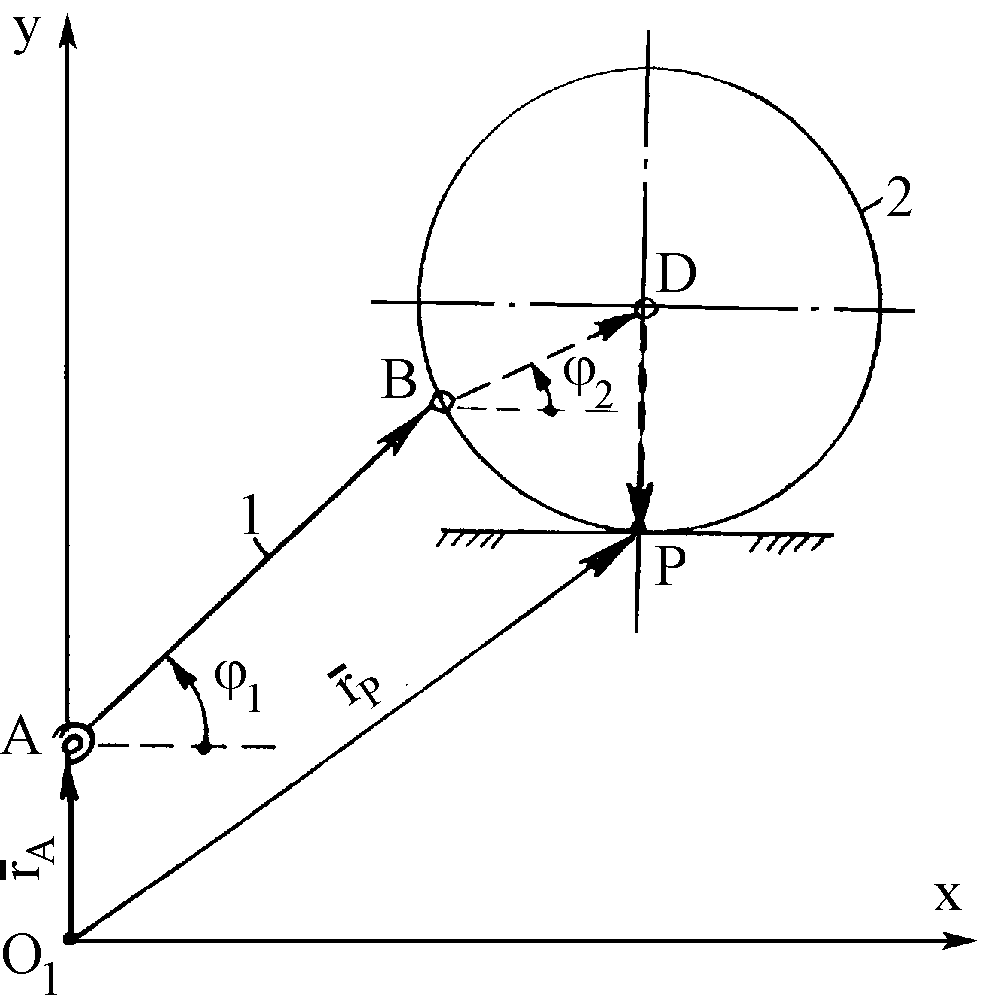
Рис. К4б

Рис. К4в
Из рис. К4б следует
![]() (80)
(80)
Входящие сюда векторы
![]() и
и
![]() определяют положение точек А и Р
относительно неподвижного начала О1
системы координат хО1у. Векторы,
обозначенные двумя буквами, задают
положение точки, определяемой второй
из этих букв, относительно точки,
обозначенной первой буквой.
определяют положение точек А и Р
относительно неподвижного начала О1
системы координат хО1у. Векторы,
обозначенные двумя буквами, задают
положение точки, определяемой второй
из этих букв, относительно точки,
обозначенной первой буквой.
Продифференцировав равенство (80) по времени, получим
![]() (81)
(81)
где обозначение
![]() с одним индексом (Р или А) соответствует
значению абсолютной скорости точки Р
или А, а обозначение
с двумя индексами – относительной
скорости; например,
с одним индексом (Р или А) соответствует
значению абсолютной скорости точки Р
или А, а обозначение
с двумя индексами – относительной
скорости; например,
![]() есть скорость точки в
во вращательном движении звена АВ
вокруг точки А.
Указанные скорости определяются
известными соотношениями:
есть скорость точки в
во вращательном движении звена АВ
вокруг точки А.
Указанные скорости определяются
известными соотношениями:
![]()
![]()
![]() (82)
(82)
где
![]() ,
,
![]() – векторы угловых скоростей звеньев 1
и 2, направленные перпендикулярно
чертежу.
– векторы угловых скоростей звеньев 1
и 2, направленные перпендикулярно
чертежу.
С учетом (82) равенство (81) будет иметь вид
![]() (83)
(83)
Спроецировав векторное равенство (83) на координатные оси и учитывая, что АВ = r1, BD = DP = r2, получим два скалярных уравнения:
![]() (84)
(84)
![]() (85)
(85)
Так как точка Р, принадлежащая катку 2, является мгновенным центром скоростей, то VPx = VPy = 0. Кроме того, sin (3/2) = –1, cos (3/2) = 0 и, как следует из условий задачи, VAx = 0 и VАy = VA = Vsin pt. С учетом этих замечаний уравнения (84) и (85) принимают вид:
1 r1 sin 1 + 2 r2 (sin 2 1) = 0, (86)
1 r1 cos 1 + 2 r2 cos 2 + V sin pt = 0. (87)
Рис. К4в позволяет составить следующее векторное равенство:
![]()
после дифференцирования которого по времени получим
![]()
или
![]() (88)
(88)
Спроецировав векторное равенство (88) на координатные оси и учитывая, что PD = r2 и DC = r3, находим:
VCx = VPx – 2 r2 sin(/2) – 3 r3 sin 3,
VCy = VPy + 2 r2 cos(/2) + 3 r3 cos 3.
В этих уравнениях VCx = 0, VPx = VPy = 0, VCy = VC, sin (/2) = 1, сos (/2) = 0. С учетом этих замечаний последние уравнения приобретают вид:
2 r2 + 3 r3 sin 3 = 0, (89)
3 r3 cos 3 VC = 0. (90)
Полученная система четырех линейных уравнений (86), (87), (89) и (90) позволяет определить четыре неизвестных 1, 2, 3 и VC.
Подставив в эти уравнения числовые значения заданных величин, получим систему уравнений:
0,7 sin 1 1 + 0,5 (sin 2 1) 2 = 0,
0,7 cos 1 1 + 0,5 cos 2 2 + 0,45 sin (1,87t) = 0,
(91)
0,5 2 + 0,8 sin 3 3 = 0,
0,8 cos 3 3 VC = 0.
Для проведения расчетов по формулам (91) с помощью универсальной математической системы MathCAD приведем эти уравнения к стандартной матричной форме:
A(1, 2, 3) X(t, 1, 2, 3) = B(t), (92)
где A(1, 2, 3) – матрица коэффициентов при 1, 2, 3 и VC; B(t) – матрица свободных членов; X(t, 1, 2, 3) – матрица-столбец неизвестных.
Расположим элементы матрицы столбца X(t, 1, 2, 3) в следующем порядке:
![]()
В этом случае матрица A(1, 2, 3) и столбец свободных членов B(t) таковы:
![]()
![]()
Выражение (92) можно записать как
![]() (93)
(93)
Принимая во внимание, что
![]()
![]()
![]() (94)
(94)
из (93) получаем систему дифференциальных уравнений вида
![]() (95)
(95)
Для решения полученных уравнений используем функцию rkfixed(f0, t0, , n, D), возвращающую матрицу решений методом Рунге-Кутта. Задаем решение уравнений
z = rkfixed(f0, t0, , n, D),
где f0 – вектор начальных условий для углов 1(0), 2(0), 3(0); t0 – начальный момент времени; – конечный момент времени; n – число шагов; D – вектор правых частей дифференциальных уравнений (95).
В результате расчетов
получим:
![]() – вектор значений времени;
– вектор значений времени;
![]() – вектор значений 1;
– вектор значений 1;
![]() – вектор значений 2;
– вектор значений 2;
![]() – вектор значений 3
для каждого шага времени n.
– вектор значений 3
для каждого шага времени n.
Введя вспомогательные функции
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
определим векторы значений:
![]()
![]()
![]()
![]()
Ниже приведена программа расчета, а результаты решения по изложенному методу содержатся в табл. К4.2 и на рис. К4г.
Таблица К4.2
Результаты решения задачи
t |
1 |
2 |
3 |
1 |
2 |
3 |
VC |
0.000 |
0.500 |
0.300 |
1.000 |
0.0000 |
0.0000 |
0.0000 |
0.0000 |
0.070 |
0.500 |
0.300 |
1.000 |
–0.0549 |
–0.0523 |
0.0389 |
0.0168 |
0.140 |
0.496 |
0.296 |
1.003 |
–0.1093 |
–0.1029 |
0.0763 |
0.0328 |
0.210 |
0.489 |
0.289 |
1.008 |
–0.1627 |
–0.1495 |
0.1105 |
0.0472 |
0.280 |
0.477 |
0.279 |
1.016 |
–0.2146 |
–0.1904 |
0.1400 |
0.0590 |
0.350 |
0.462 |
0.265 |
1.026 |
–0.2647 |
–0.2240 |
0.1637 |
0.0679 |
0.420 |
0.444 |
0.250 |
1.037 |
–0.3123 |
–0.2492 |
0.1809 |
0.0736 |
0.490 |
0.422 |
0.232 |
1.050 |
–0.3567 |
–0.2655 |
0.1913 |
0.0762 |
0.560 |
0.397 |
0.214 |
1.063 |
–0.3972 |
–0.2727 |
0.1950 |
0.0759 |
0.630 |
0.369 |
0.195 |
1.077 |
–0.4331 |
–0.2711 |
0.1924 |
0.0730 |
0.700 |
0.339 |
0.176 |
1.090 |
–0.4635 |
–0.2612 |
0.1841 |
0.0681 |
0.770 |
0.306 |
0.157 |
1.103 |
–0.4878 |
–0.2441 |
0.1709 |
0.0616 |
0.840 |
0.272 |
0.140 |
1.115 |
–0.5051 |
–0.2209 |
0.1538 |
0.0541 |
0.910 |
0.237 |
0.125 |
1.126 |
–0.5149 |
–0.1930 |
0.1337 |
0.0460 |
0.980 |
0.201 |
0.111 |
1.135 |
–0.5162 |
–0.1620 |
0.1117 |
0.0377 |
1.050 |
0.164 |
0.100 |
1.143 |
–0.5087 |
–0.1295 |
0.0890 |
0.0295 |
1.120 |
0.129 |
0.091 |
1.149 |
–0.4916 |
–0.0973 |
0.0666 |
0.0218 |
1.190 |
0.094 |
0.084 |
1.154 |
–0.4644 |
–0.0670 |
0.0458 |
0.0148 |
1.260 |
0.062 |
0.079 |
1.157 |
–0.4267 |
–0.0402 |
0.0274 |
0.0088 |
1.330 |
0.032 |
0.077 |
1.159 |
–0.3784 |
–0.0184 |
0.0126 |
0.0040 |
1.400 |
0.006 |
0.075 |
1.160 |
–0.3195 |
–0.0027 |
0.0018 |
0.0006 |
1.470 |
–0.017 |
0.075 |
1.160 |
–0.2505 |
0.0064 |
–0.0043 |
–0.0014 |
1.540 |
–0.034 |
0.075 |
1.160 |
–0.1729 |
0.0090 |
–0.0061 |
–0.0020 |
1.610 |
–0.046 |
0.076 |
1.159 |
–0.0884 |
0.0062 |
–0.0042 |
–0.0014 |
1.680 |
–0.053 |
0.077 |
1.159 |
0.0000 |
–0.0000 |
0.0000 |
0.0000 |
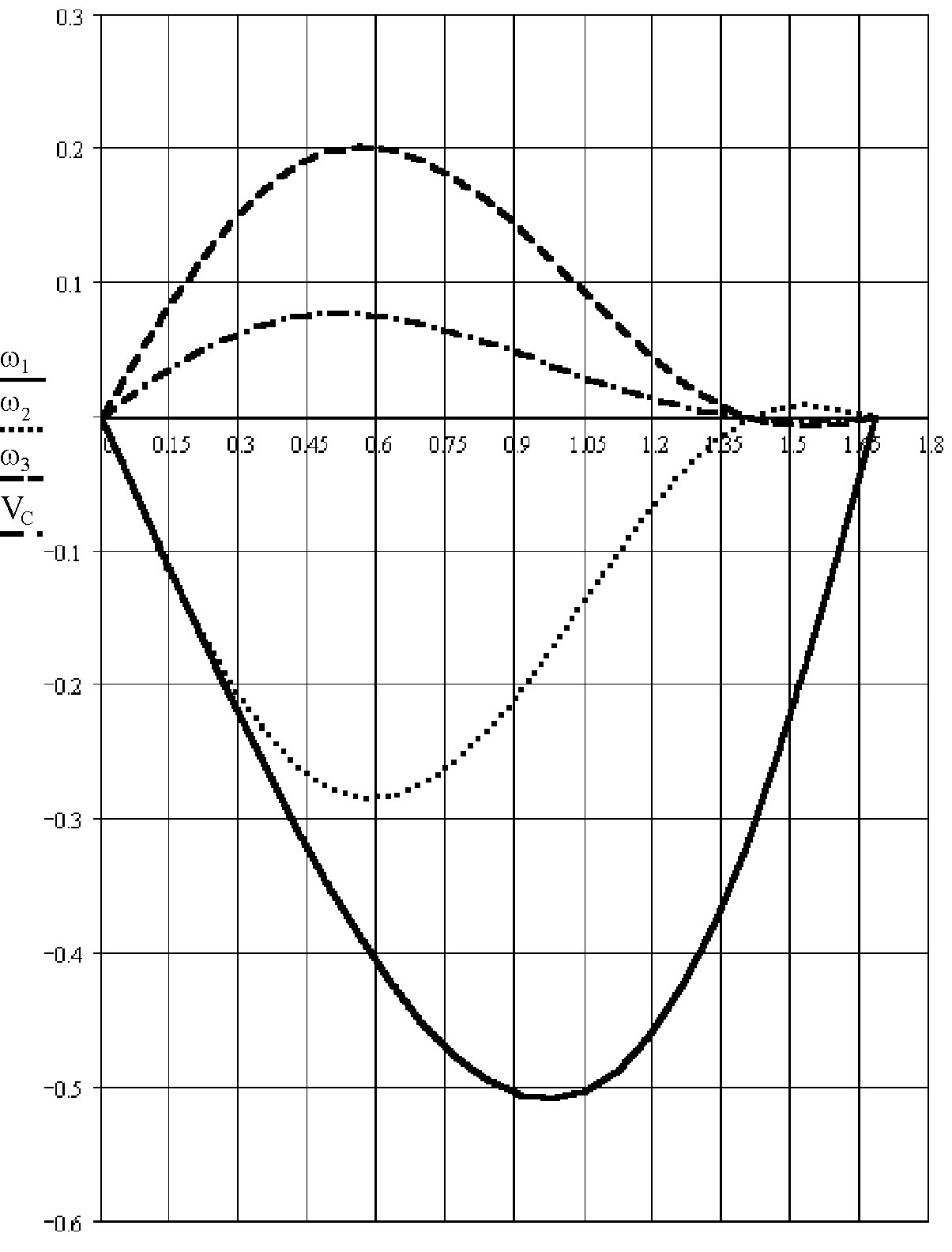
Рис. К4г
Для составления программ на языке Pascal уравнения (91) представим в явном виде относительно 1, 2, 3 и VC:
![]()
![]()
(96)
![]()
![]()
Конечно-разностная схема Эйлера для уравнений (94), (96) приводит к следующим уравнениям, связывающим значения углов и угловых скоростей в начале и конце k-го шага интегрирования:
1 (k + 1) = 1 (k) + 1(k) t,
2 (k + 1) = 2 (k) + 2(k) t,
3 (k + 1) = 3 (k) + 3(k) t.
Учитывая начальные условия 1(0), 2(0), 3(0) и шаг по времени t, организуем цикл по времени с помощью стандартного оператора
repeat
. . . . . .
Тело цикла (формулы (96) для вычислений 1, 2, 3 и VC)
. . . . .
until t > .
На печать с шагом t = /24 = 0,07 c выводятся переменные t, 1, 2, 3, 1, 2, 3 и VC.
Ниже представлена программа и результаты расчета на языке Pascal (табл. К4.3), а также график изменения скоростей в зависимости от времени (рис. К4д).
Program Mаnipul
const dt=1.68/24;
Var
om1, om2, om3, Vc, f1, f2, f3, t, K1, K2: REAL;
F, S: Text;
Begin
t := 0; f1 := 0.5; f2 := 0.3; f3 := 1.0;
Assign(F, 'S41.dat');
Assign(S, 'S42.dat');
ReWrite(F);
ReWrite(S);
Repeat
K1 := sin(f1)*cos(f2) - cos(f1)*(sin(f2) - 1);
om1 := 0.6428*sin(1.87*t)*(sin(f2) - 1)/K1;
K2 := - K1;
om2 := 0.9*sin(1.87*t)*sin(f1)/K2;
om3 := 0.5625*sin(1.87*t)*sin(f1)/(K1*sin(f3));
Vc := 0.45*sin(1.87*t)*sin(f1)*cos(f3)/(K1*sin(f3));
Writeln(F, t:8:3, f1:8:3, f2:8:3, f3:8:3, om1:10:4, om2:10:4, om3:10:4, Vc:10:4);
Writeln(S, t:8:3, om1:8:3, om2:10:3, om3:10:3, Vc:12:3);
t := t + dt;
f1 := f1 + om1*dt;
f2 := f2 + om2*dt;
f3 := f3 + om3*dt;
Until t >= 1.68 + 0.15;
End.
Таблица К4.3
Результаты расчета
t |
1 |
2 |
3 |
1 |
2 |
3 |
VC |
0.0000 |
0.5000 |
0.3000 |
1.0000 |
0.0000 |
0.0000 |
0.0000 |
0.0000 |
0.0700 |
0.4981 |
0.2981 |
1.0014 |
–0.0529 |
–0.0548 |
0.0407 |
0.0175 |
0.1400 |
0.4926 |
0.2924 |
1.0057 |
–0.1055 |
–0.1074 |
0.0795 |
0.0341 |
0.2100 |
0.4834 |
0.2831 |
1.0125 |
–0.1572 |
–0.1557 |
0.1147 |
0.0486 |
0.2800 |
0.4706 |
0.2707 |
1.0216 |
–0.2078 |
–0.1979 |
0.1450 |
0.0606 |
0.3500 |
0.4544 |
0.2556 |
1.0326 |
–0.2566 |
–0.2327 |
0.1694 |
0.0694 |
0.4200 |
0.4348 |
0.2383 |
1.0452 |
–0.3030 |
–0.2589 |
0.1871 |
0.0751 |
0.4900 |
0.4120 |
0.2196 |
1.0587 |
–0.3465 |
–0.2761 |
0.1980 |
0.0776 |
0.5600 |
0.3863 |
0.1999 |
1.0727 |
–0.3863 |
–0.2841 |
0.2021 |
0.0772 |
0.6300 |
0.3580 |
0.1800 |
1.0868 |
–0.4218 |
–0.2830 |
0.1998 |
0.0744 |
0.7000 |
0.3274 |
0.1605 |
1.1006 |
–0.4521 |
–0.2735 |
0.1917 |
0.0695 |
0.7700 |
0.2948 |
0.1419 |
1.1135 |
–0.4767 |
–0.2563 |
0.1785 |
0.0631 |
0.8400 |
0.2608 |
0.1247 |
1.1255 |
–0.4947 |
–0.2326 |
0.1611 |
0.0555 |
0.9100 |
0.2258 |
0.1094 |
1.1360 |
–0.5055 |
–0.2038 |
0.1404 |
0.0473 |
0.9800 |
0.1902 |
0.0963 |
1.1451 |
–0.5083 |
–0.1713 |
0.1175 |
0.0388 |
1.0500 |
0.1548 |
0.0855 |
1.1525 |
–0.5025 |
–0.1369 |
0.0936 |
0.0304 |
1.1200 |
0.1201 |
0.0771 |
1.1582 |
–0.4872 |
–0.1025 |
0.0699 |
0.0224 |
1.1900 |
0.0868 |
0.0711 |
1.1623 |
–0.4619 |
–0.0700 |
0.0477 |
0.0152 |
1.2600 |
0.0557 |
0.0673 |
1.1649 |
–0.4258 |
–0.0413 |
0.0281 |
0.0089 |
1.3300 |
0.0275 |
0.0652 |
1.1663 |
–0.3786 |
–0.0181 |
0.0123 |
0.0039 |
1.4000 |
0.0029 |
0.0646 |
1.1667 |
–0.3203 |
–0.0016 |
0.0011 |
0.0003 |
1.4700 |
–0.0171 |
0.0648 |
1.1666 |
–0.2514 |
0.0075 |
–0.0051 |
–0.0016 |
1.5400 |
–0.0320 |
0.0654 |
1.1661 |
–0.1734 |
0.0097 |
–0.0066 |
–0.0021 |
1.6100 |
–0.0412 |
0.0660 |
1.1657 |
–0.0885 |
0.0064 |
–0.0043 |
–0.0014 |
1.6800 |
–0.0443 |
0.0663 |
1.1656 |
0.0000 |
0.0000 |
0.0000 |
0.0000 |
Рис. К4д
Оценим полученные результаты, сравнив их со значениями скоростей, вычисленными для какого-либо момента времени с помощью мгновенных центров скоростей.
Например, при t = 0,7 с из табл. K4.2 имеем: 1 = 0,339 рад = 19,42°, 2 = 0,167 рад = 10,08°, 3 = 1,09 рад = 62,45°, VA = 0,435 м/с.
Вычертим в масштабе схему механизма для выписанных углов (рис. К4е) и покажем на ней положение мгновенных центров скоростей.
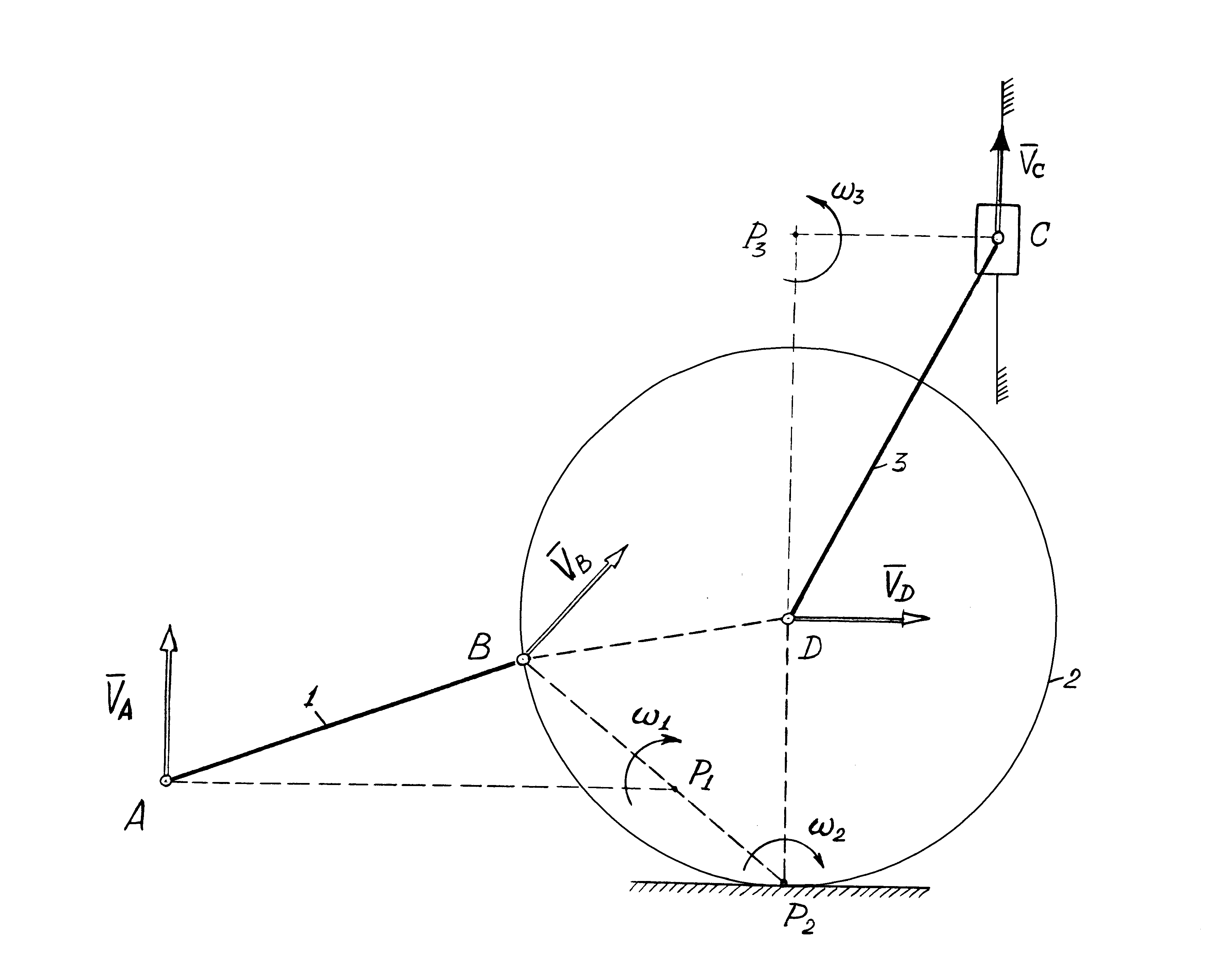
Рис. К4е
Угловая скорость звена 1
![]()
Скорость точки В
VB = 1 BP1 = 0,46270,37 = 0,1712 м/с.
Угловая скорость колеса (звена 2)
![]()
Скорость точки D
VD = 2 DP2 = 0,26340,5 = 0,1371 м/с.
Угловая скорость звена 3
![]()
Скорость точки С
VC = 3 CP3 = 0,18290,38 = 0,0695 м/с.
Полученные результаты практически совпадают с результатами расчета на ЭВМ.