

Теорема о нормальной корреляции и ее следствия.
Теорема.
Для гауссовских векторов
 оптималь-ная оценка в виде условного
среднего
оптималь-ная оценка в виде условного
среднего
 вектора
вектора
 относительно ξ (по наблюдению ξ) и ее
матрица ошибок
относительно ξ (по наблюдению ξ) и ее
матрица ошибок
 задаются формулами
задаются формулами
 =
= ,
,
 ,
,
 ,
,
 ,
,
 .
.
Доказательство. Образуем вектор
 .
.
 ,то
есть вектор η не коррелирован с вектором
,то
есть вектор η не коррелирован с вектором
 .
В силу гауссовости векторов
и вектор
.
В силу гауссовости векторов
и вектор
 ,
а также η будут гауссовскими.
Некоррелированность для гауссовских
векторов означает их независи-мость.
Значит η и ξ-M[ξ],
а также η и ξ будут независимы и,
следовательно, M[η/ξ]=M[η]
,
а также η будут гауссовскими.
Некоррелированность для гауссовских
векторов означает их независи-мость.
Значит η и ξ-M[ξ],
а также η и ξ будут независимы и,
следовательно, M[η/ξ]=M[η] 0.
0.
Следует,
что
 .
Для доказательства выражения для
матрицы ковариации ошибок рассмотрим
условную ко-вариацию
.
Для доказательства выражения для
матрицы ковариации ошибок рассмотрим
условную ко-вариацию
 .
Поскольку
.
Поскольку
 ,
то, в силу независимости η и ξ.
,
то, в силу независимости η и ξ.

Поскольку
 не зависит от случая, то есть от
наблюденийξ, то
не зависит от случая, то есть от
наблюденийξ, то
 .Теорема
доказана в целом.
.Теорема
доказана в целом.
1.
Если величины
и ξ некоррелированы, то есть
 ,тогда
,тогда
 ,
,
 ,
Наблюдение
за ξ не дает новой информации относительно
значений
.
,
Наблюдение
за ξ не дает новой информации относительно
значений
.
2.
Если величины
и ξ полностью коррелированы, то есть
 ,
,


 ,
то
,
то

 .
Наблюдение
за ξ дает полную информацию о
.
.
Наблюдение
за ξ дает полную информацию о
.
Следствие 1.Пусть и ξ случайные векторы, а G – некоторая совокупность условий. Тогда

 =
=



 .
.
Следствие 2.
Обозначим
векторы
 ,
,
 ,
,
 ,
,
 .
Тогда
с учетом первого следствия
.
Тогда
с учетом первого следствия

 .
.
Оценка
является линейной и ее можно представить
в виде
 – некоторые известные коэффициенты.
Тогда
– некоторые известные коэффициенты.
Тогда
 .
Данное
следствие носит название леммы об
ортогональном проецировании и
свидетельствуют о том, что ошибка
оценивания ортогональна в статистическом
смысле любому из наблюдений.
.
Данное
следствие носит название леммы об
ортогональном проецировании и
свидетельствуют о том, что ошибка
оценивания ортогональна в статистическом
смысле любому из наблюдений.
Контрольно-измерительный материал № 4
Классификация систем управления. Основ-ные этапы синтеза сложных систем управления.
Классификация СУ может осуществляться различным образом. Прежде всего, она осуществля-ется по задачам или целям управления. В СУ ре-шаются обычно задачи четырех типов (стаби-лизация, выполнение программы, слежение, оптимизация).
Задача стабилизации объекта управления состоит в поддержании его выходных параметров (состояний) вблизи некоторых заранее известных значений, несмотря на действие помех и различного рода возмущений.
Задача выполнения программы возникает в случаях, когда значения управляемых величин должны изменяться во времени по заранее заданному закону, который не может быть изменен в процессе движения и фактически не зависит от состояния объекта.
Задача слежения при управлении объектами соответствующего типа состоит в установлении как можно более точного соответствия между текущим состоянием управляемой системы и состоянием другой системы.
Задача оптимизации состоит в том, чтобы наилучшим образом в смысле заданного критерия достичь поставленной цели при реальных условиях и ограничениях. Понятие оптимальности каждый раз конкретизируется.
По степени участия человека в процессе управления системы управления делятся на два больших класса: системы автоматического управления (САУ) и автоматизированные системы управления (АСУ).
Основные задачи, решаемые САУ, относятся к задачам стабилизации, выполнения программы.
В АСУ в контур управления включен человек, на которого возлагаются функции принятия важных решений и ответственность за принятые решения. \
Классификация СУ и, прежде всего, АСУ проводится также и по особенностям структуры их построения следующим образом.
По числу уровней иерархии системы делятся на многоуровневые и одноуровневые. Многоуровневые СУ могут быть однородными и неоднородными.
По принципам управления и подчиненности системы делятся на централизованные, децентрализованные и смешанные.
По возможности изменения структуры во времени различают системы с жесткой (фиксированной) структурой и системы с переменной (адаптивной) структурой.
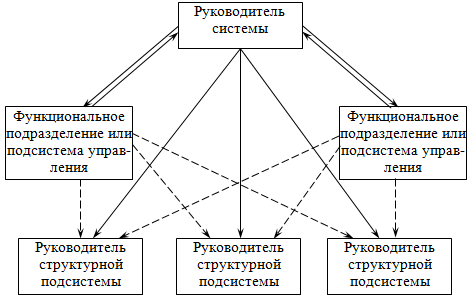
По принципам разбиения элементов системы на подсистемы классифицируют структуру систем, в которых элементы объединяются по функциональному и (или) объектному принципам. В организационных СУ при этом различают линейную, функциональную и линейно-штабную структуры управления.
Важнейшим принципом классификации систем управления является их разделение на простые и сложные. Формализация процессов и синтез управления в простой системе осуществляются на основе существующей методологии теории автоматического управления (регулирования).
Создание сложной СУ предусматривает рассмотрение нескольких этапов ее построения. Факторы сложности объекта управления:
отсутствие законченного математического описания;
стохастический характер поведения;
развивающийся характер поведения;
негативность к управлению;
невоиспроизводимость в эксперименте
Особенности процесса создания сложной СУ часто приводят к тому, что цель управления таким объектом в полной мере никогда не достигается
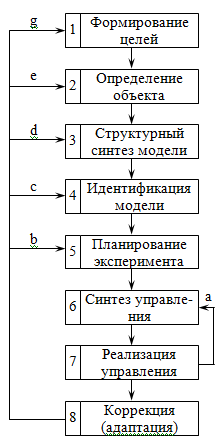
Формирование целей управления. Определение совокупности целей явля-ется
 наименее формали-зуемым этапом. Оно
базиру-ется на реализации различ-ного
рода методов систем-ного анализа и
эвристичес-ких приемах для определе-ния
целевых функций и по-казателей качества
управле-ния.
наименее формали-зуемым этапом. Оно
базиру-ется на реализации различ-ного
рода методов систем-ного анализа и
эвристичес-ких приемах для определе-ния
целевых функций и по-казателей качества
управле-ния.Определение объекта. Этот этап связан с выделе-нием той части среды, состояние которой субъект может изменить в выгодном для себя направлении.
Структурный синтез модели. Модель F, связывающая входы X и U с выходом объекта Y, определяется структурой W и параметрами H F=(W,H). Этап структурного синтеза модели включает: определение внешней структуры; декомпозицию модели; определение внутренней структуры.
Синтез внешней структуры сводится к содержательному определению входов X и U и выхода Y без учета внутренней структуры.
Декомпозиция модели заключается в том, чтобы на основе априорных сведений об объекте, упростить задачу синтеза структуры модели путем выделения основных функциональных действий или функциональных подсистем, определяющих поведение объекта.
Идентификация параметров модели. Этот этап состоит в определении числовых характеристик H в режиме нормального функционирования объекта.
Планирование эксперимента. Данный этап направлен на осуществление синтеза плана эксперимента, позволяющего с максимальной эффективностью определить искомые характеристики модели объекта управления.
Синтез управления. На этом этапе принимается решение о том, каково должно быть управление U*, чтобы достичь заданной цели управления Z*.
Реализация оптимального управления или отработка оптимального решения U*, полученного на предыдущем этапе. Реализовав управление и убедившись, что цель управления не достигнута, возвращаются к одному из предыдущих этапов. В случае, когда цель управления достигнута, необходимость обращения к предыдущему этапу вызывается изменением только состояния среды X.
Коррекция (адаптация). Специфика управления сложной системой состоит в том, что вследствие наличия помех и нестационарности информация, полученная на предыдущих этапах, только приближенно отражает состояние системы в текущий момент времени. Это вызывает необходимость коррекции ранее полученных результатов. Коррекция может затрагивать различные этапы, вплоть до изменения целей управления.