

5.9. Перспективы развития спинс.
Кроме
намеченных в разделе 5.1 направлений
развития системы, а именно создание
конструктора сетей с графическим
интерфейсом, расширение языка спецификации
сетей и др., необходима доработка и
разработка нейросетевых реализаций БЗ
и БПР, разработка методов создания
реальных приложений по полученным с
помощью СПИНС спецификациям сетей.
Привлекательным является также создание
трехмерного визуализатора БЗ. Визуализация
БЗ основана на введении топологии в
конечном пространстве образов базы
знаний
(определение 4.5) посредством отображения
F
и Y
в R,
таким образом, области в B отобразятся
в области в
![]() .
.
Если
образ
![]() ,
,
![]() сформирован, то он отображается точкой
цвета, соответствующего сформировавшейся
оценке образа
сформирован, то он отображается точкой
цвета, соответствующего сформировавшейся
оценке образа
![]() .
При этом в пространстве обозначатся
некоторые цветные области (рис. 5.9.1),
иллюстрирующие закон управления.
.
При этом в пространстве обозначатся
некоторые цветные области (рис. 5.9.1),
иллюстрирующие закон управления.
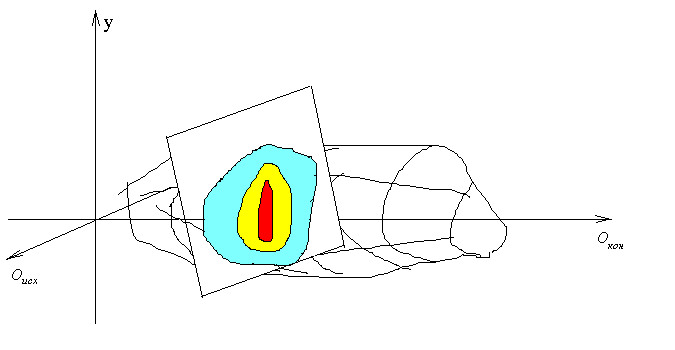
Рис. 5.9.1.
Заключение.
Основные результаты дипломной работы состоят в следующем:
Разработана концепция и реализовано ядро программной системы СПИНС для построения и исследования нейросетевой реализации прототипов управляющих систем, построенных по методу автономного адаптивного управления, созданного в отделе имитационных систем Института Системного Программирования РАН.
Доработаны аппарат формирования и распознавания образов, алгоритм заполнения базы знаний управляющей системы и алгоритм принятия решений.
Данные алгоритмы протестированы с помощью СПИНС на модельных примерах. Показано, что УС ААУ в рассмотренных примерах находит способ управления предъявленным объектом (средой) и осуществляет управление в соответствии с целевыми функциями.
Благодарности.
Автор выражает благодарность научному руководителю д. ф.-м. н. Александру Аркадьевичу Жданову за ценную поддержку и помощь в данной работе и член.-корр. РАН Виктору Петровичу Иванникову, под руководством которого были приобретены знания и опыт объектно-ориентированного программирования, в частности освоены объектные шаблоны (design patterns), использованные при разработке СПИНС.