

Определяется м-ца потерь с оценками.
![]()
Матрица потерь обрабатывается в несколько циклов. В каждом цикле суммируются строки. Альтернатива с меньшей суммой ставится на 1 место. Соответствующие ей строка и столбец удаляются из матрицы. Переходим к следующему циклу.( A1,A3,A13,A7,A5,A6,A11)
-
Nцикла
Ai
1
2
3
4
5
6
7
A1
3,545
A3
4,295
2,02
A5
6
4,58
3,168
1,75
1,168
A6
7,66
6,25
4,83
3,42
1,5
0,084
A7
9,83
4,416
3
1,584
A11
9,5
7,08
6,66
5,25
3,33
1,916
1,916
A13
5,168
3,75
2,33
Начиная с конца, рассмотри пары альтернатив. Если
 – альтернативы остаются на своих
местах, иначе – меняются местами
– альтернативы остаются на своих
местах, иначе – меняются местами
;0,084<1,96
=> A11
остается на месте;![]() ;
;
![]() , A6
остается на месте;
, A6
остается на месте; ![]() ;
;
![]() => меняем
местами и т.д.
=> меняем
местами и т.д.
![]()
21.1 – Методика сравнительной оценки 2-ух стр-р по степени доминирования
Методика служит для выбора рациональной структуры из 2-х конкурирующих структур на основе матрицы векторных оценок [Kji]. Операции:
Конкурирующие структуры получают название: базовое и новое.
Методом экспертных оценок определяются веса частных показат. Vj, j=1..m
По каждому частному показателю Kj определяется степень доминирования новой структуры над базовой.
Вычисляется обобщенная оценка степени доминирования новой структуры над базовой.
Исходя из обобщенной оценки выбирается рациональная структура.
-
Ki
Напр. экстрем.
Sб
Sн
K1 — масса
K2 — объем
K3 — стоимость
K4 — память
K5 — гибкость
K6 — комфортность
↓
↓
↓
↑
↑
↑
20
0.04
5
384
Отл(0.9)
Уд(0.5)
10
0.08
10
512
Уд(0.5)
Отл(0.9)
Ki
Vj
Степень доминир. Sн над Sб
Структ. Оценка с учетом Vj
K1
K2
K3
K4
K5
K6
2
2
1
3
3
4
2↑
2↓
2↓
1,3↑
1,8↓
1,8↑
(2↑)2
(2↓)2
(2↓)1
(1.3↑)3
(1.8↓)3
(1.8↑)4
Обобщенная оценка степени доминирования S2 над S1: 22⋅1,33⋅1,84/(22⋅21⋅1,83) >1
Если дробь >1, значит новая превосходит базовую (и наоборот)
21.2 – Циклы проектирования и уровни opt систем
-
Общесистемное проектирование
Оценка целесообр. разработки
Выбор структуры системы
Разраб. модели для оценки стр-р
Разр. принцип. постр. матем. обесп.
Разр. принци. аппар. проектир.
-
Проектир. матем. обеспеч.
Опред. и перечень реш-х функц. задач
Разр. сист. ПО
Разр. прикл. ПО
Отладка ПО
Аппаратурное проектиров.
Выбор технич. обесп.
Формир. техн. обесп
Комплексир. ПО
Отладка ПО
С т. зрения содержания рассм. вопросов выдел. общесист. обеспеч., аппар. проектир, матем. обеспеч.
С т. зрения глубины проработки выделяют этапы и стадии.
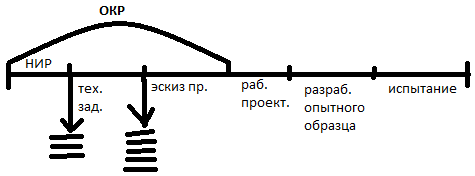
Уровни опт.
Эфф. сист на 90% определ. общ. сист. проектир. 3 уровня оптимизации:
Глобальная – новые идеи или принципы построения систем (70%)
Структурная – поиск рациональн. структ. (20%)
Параметрическая- подбор наилучшей совместимости параметров (10%).
22.1 - Сверка частных показателей (ЧП)
Все методы сверки можно разбить на 2 класса:
1)сверка
с использование аддит. Преобразований
![]()
![]()
α – СП ЛПР и разброс вект. Оценок по AL
ki – безразл. пронормир. оценки ЧП
Пример:
 t
–коэфф. безразмерн. ф. приведения к
безразмерному виду
t
–коэфф. безразмерн. ф. приведения к
безразмерному виду
2)Сверка с исп. Мультипликативн. Преобраз.

Пример.
Плюсы:Возможность работы с вектором ЧП учитыв. СП ЛПР
Минусы:Субьективность факторов, необходимость привидения к безразмерным оценкам используя квантили
22.2 - СТРУКТУРНАЯ ОПТИМИЗАЦИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ ОБСЛУЖИВАНИЯ
В общем случае под распределенными системами обслуживания понимают совокупность следующих элементов:
- закрепленная территория или зона ответственности;
- множество распределенных обслуживающих объектов {S};
- система сбора информации и заявок от обслуживаемых объектов{Q};
- система управления.
Система моделирования РСО должна обеспечивать выполнение следующих функций : Отображение окружающей среды. На каждом шаге моделирования необходимо задать характеристики каждого элемента пространства A(I,J)=(P1, … Pk). Вычислительная сложность операции определяется только размерностью пространства моделирования N2 и числом параметров k. Отображение объектов обслуживания. Этот этап требует задания параметров элементов {Q}. Сложность операции линейно зависит от количества объектов - источников заявок М и степени детализации их описания Q(I)=(X,Y,P1, … Pr), где X и Y координаты объекта, а Pi его свойства.Отображение обслуживающих объектов. Этот этап требует задания параметров элементов {S}. Сложность операции линейно зависит от количества обслуживающих объектов K и степени детализации их описания S(I)=(X,Y,P1, … Pr), где X и Y координаты объекта, а Pi его свойства. Параллельная реализация этой операции не эффективна. Оценки эффективности системы управления. Результатом моделирования РСО должна стать оценка того, справится ли система с нагрузкой, заданной {Q} в состоянии, заданном {A} и {S}, и если нет, Визуализация результатов моделирования. Вычислительная сложность процесса визуализации зависит от представляемой информации и в общем виде достаточно трудна для оценки. Представленные соображения позволяют предложить следующую структуру системы моделирования РСО:- последовательная подсистема моделирования обслуживающих объектов и заявок, внешней среды;- параллельная подсистема оценки эффективности системы обслуживания; - унифицированная подсистема визуализации результатов моделирования. Такой подход приведет к сокращению сроков разработки и снижению затрат на создание новых систем моделирования РСО. Теоретическая оценка математического ожидания числа бросков F (операций rand), необходимых для заполнения вектора уникальными числами дает следующий результат: При выполнении расчетов вычислительная нагрузка равномерно распределялась между узлами системы, а результат получался редуцированием на ведущем узле. Проведенные эксперименты подтверждают практическую возможность использования многопроцессорных вычислительных систем для выполнения этапа оценки состояния распределенной системы обслуживания.
23.1 - Функция полезности
Пусть заданы критерии K1,…,Kn; X = { x | x = (x1,…,xn) } – множество векторных оценок вариантов по этим критериям. Пусть на X задано R – отношение предпочтения. Числовая функция f : X → R , называется функцией полезности, если она обладает следующим свойством: f(x) ≥ f(y) ⇔ x R y.
Если известна функция полезности, то поиск оптимального варианта сводится к задаче нахождения x* = arg max f(x), x∈X – аргумента максимума функции полезности на множестве X.
Методы построения функции полезности делятся на эвристические и аксиоматические.
К эвристическим методам можно отнести метод главного критерия и метод обобщенного критерия. Метод главного критерия сводится к оптимизации по одному выбранному критерию, при условии, что остальные критерии не больше (или не меньше) приемлемых значений. Метод обобщенного критерия заключается в свёртке набора критериев в числовую функцию, которая и будет являться функцией полезности.
Виды свёрток:
1) аддитивная свёртка: f = α1K1+…+αnKn;
2)
мультипликативная свёртка: f =
exp(α1ln(K1)+…+αnln(Kn)) = = ![]() *…*
*…*![]()
3) приведенная свёртка: f = min(Ki/αi) по всем i=1…n (или f = max(Ki/αi) по
всем i=1…n).
Аксиоматические методы построения функции полезности – это формальные методы, основанные на том, что формулируются специальные предположения (аксиомы) о свойствах предпочтения, выполнение которых гарантирует существование функции полезности конкретного вида. Обычно, при использовании таких методов функцию полезности строят в аддитивном виде: f = λ1f1+…+λnfn как сумму функций полезности по каждому критерию с некоторыми весовыми коэффициентами λ1,…,λn.
23.2 - Методы компромиссов
X-вектор решений
![]() – сов-сть показателей
– сов-сть показателей
![]() – част. Показ.
– част. Показ.
![]() – веса частн. Показ.
– веса частн. Показ.
Принципы(группы):
Принцип равномерности
Принцип равенства – Альт., у которой все показатели имеют одинаковое отклонение от оптим., лучшая.
Принцип квазиравенства – Та альт. лучше, у которой пронорм. безразмерн. показ. равны между собой с учетом допуска.
Принцип максимина – Та альт. лучше, у кот. миним. знач. безразм. показат. больше.
Принцип справедливой уступки
Принцип абсолютной уступки – Лучше та альт., у кот. сумма приращений матор. ≥суммы минир. показат.
Принцип относит. уступки - Наилучшей считается такая альт., при которой суммарный относительный уровень снижения одного или нескольких критериев не превосходит относительного суммарного уровня повышения по остальным критериям.
Принцип выделения 1 оптимизир. показат. – Выбир. та альт., у кот. главный показатель имеет оптим. значение, а остальные в пределах нормы.
26.1 - Критерии Вальда, Сэвиджа
Критерий Вальда (или критерий «максимина») предполагает, что из всех возможных вариантов «матрицы решений» выбирается та альтернатива, которая из всех самых неблагоприятных ситуаций развития события (минимизирующих значение эффективности) имеет наибольшее из минимальных значений (т.е. значение эффективности, лучшее из всех худших или максимальное из всех минимальных).
Критерием Вальда (критерием «максимина») руководствуется при выборе рисковых решений в условиях неопределенности, как правило, субъект, не склонный к риску или рассматривающий возможные ситуации как пессимист.
Критерий Сэвиджа (критерий потерь от «минимакса») предполагает, что из всех возможных вариантов «матрицы решений» выбирается та альтернатива, которая минимизирует размеры максимальных потерь по каждому из возможных решений. При использовании этого критерия «матрица решения» преобразуется в «матрицу потерь» (один из вариантов «матрицы риска»), в которой вместо значений эффективности проставляются размеры потерь при различных вариантах развития событий.
Критерий Сэвиджа используется при выборе рисковых решений в условиях неопределенности, как правило, субъектами, не склонными к риску.
25.1 – Метод ELECTRE.(анализ бинарных отношений между вариантами решений).
1.Рассмотрим 7 альтернатив:
А1,А2,А3,А4,А5,А6,А7,А8;{K}-{K1,K2,K3,K4};K1-производительность;; К2-живучесть;К3-модульность;К4-реализуемость.
2.С помощью СП ЛПР определяем веса ИП. W1=0,25;W2=0,33;W3=0,29;W4=0,13;
3.Формируем матрицу альтернатив в виде лингвистических переменных:
|
А1 |
А2 |
А3 |
А5 |
А6 |
А7 |
А8 |
K1 |
Отл. |
Хор. |
Уд. |
Пл. |
Пл. |
Уд. |
Отл. |
K2 |
Отл. |
Хор. |
Уд. |
Пл. |
Пл. |
Уд. |
Отл. |
K3 |
Отл. |
Пл. |
Отл. |
Хор. |
Отл. |
Отл. |
Пл. |
K4 |
Отл. |
Пл. |
Отл. |
Уд. |
Отл. |
Отл. |
Уд. |
4.С помощью шкалы Карингтола переходим к численным оценкам:
|
А1 |
А2 |
А3 |
А5 |
А6 |
А7 |
А8 |
K1 |
0,9. |
0,72 |
0,5 |
0,25 |
0,29 |
0,5 |
0,1 |
K2 |
0,9 |
0,72 |
0,5 |
0,25 |
0,29 |
0,5 |
0,1 |
K3 |
0,1 |
0,25 |
0,1 |
0,72 |
0,9 |
0,9 |
0,29 |
K4 |
0,1 |
0,25 |
0,3 |
0,5 |
0,9 |
0,9 |
0,9 |
5.Каждой паре альтернатив ставится в соответствие индекс согласия Сik,несогласия dik.
Сik=(значёк суммы, где j€k )Wj Сik€[0,1]
Сik опр. Степень превосходства i-ой А над К-ой.
К-подмножество ИП, по кот. I-ая А превосходит или не уступает К-ой.
Сik |
А1 |
А2 |
А3 |
А5 |
А6 |
А7 |
А8 |
А1 |
////////////// |
0,58 |
1 |
0,58 |
0,58 |
0,58 |
0,58 |
А2 |
0,42 |
////////////// |
1 |
0,58 |
0,58 |
0,58 |
0,58 |
А3 |
0,45 |
0 |
////////////// |
0,58 |
0,58 |
0,58 |
0,58 |
А5 |
0,41 |
0,42 |
0,42 |
////////////// |
0,58 |
0 |
1 |
А6 |
0,42 |
0,42 |
0,42 |
1 |
////////////// |
0,42 |
1 |
А7 |
0,42 |
0,42 |
1 |
1 |
1 |
////////////// |
1 |
А8 |
0,42 |
0,42 |
0,42 |
0,13 |
0 |
0 |
////////////// |
С12=W1+W2
C13=W1+W2+W3+W4 и т.д.
Сik |
А1 |
А2 |
А3 |
А5 |
А6 |
А7 |
А8 |
А1 |
////////////// |
0,19 |
0 |
0,62 |
0,8 |
0,8 |
0,4 |
А2 |
0,18 |
////////////// |
0 |
0,43 |
0,61 |
0,61 |
0,21 |
А3 |
0,4 |
0,22 |
////////////// |
0,62 |
0,8 |
0, 8 |
0,4 |
А5 |
0,61 |
0,43 |
0,21 |
////////////// |
0,4 |
0,4 |
0 |
А6 |
0,61 |
0,43 |
0,21 |
0 |
////////////// |
0,21 |
0 |
А7 |
0,4 |
0,22 |
0 |
0 |
0 |
////////////// |
0 |
А8 |
0,8 |
0,63 |
0,4 |
0,45 |
0,61 |
0,61 |
////////////// |
Dik-несогласие в превосходстве i-ой над К-ой
К-подмножество ИП, по кот. i-ая А не превосходит К-ую.
D12=max{(0,9-0,72),(0,9-0,72)<(0,1-0,29),(0,1-0,29)}
D15=max{(0,1-0,72),(0,1-0,5)}
6.Опр. подмножество рационального решения критического выбора.
26.2 - Классификация проблем по степени их структуризации
Согласно классификации, предложенной Саймоном и Ньюэллом, все множество проблем в зависимости от глубины их познания подразделяется на 3 класса:
хорошо структурированные или количественно выраженные проблемы, которые поддаются математической формализации и решаются с использованием формальных методов;
неструктуризованные или качественно выраженные проблемы, которые описываются лишь на содержательном уровне и решаются с использованием неформальных процедур;
слабоструктуризованные (смешанные проблемы), которые содержат количественные и качественные проблемы, причем качественные, малоизвестные и неопределенные стороны проблем имеют тенденцию доменирования.
Аспекты проблем:
цель или ряд целей;
альтернативы достижения целей;
ресурсы, расходуемые на реализацию альтернатив;
модель или ряд моделей;
критерий выбора предпочтительной альтернативы.
Степень структуризации проблемы определяется тем, на сколько хорошо выделены и осознаны указанные элементы проблем.
Характерно, что одна и та же проблема может занимать различное место в таблице классификации. В процессе все более глубокого изучения, осмысления и анализа проблема может превратиться из неструктуризованной в слабоструктуризованную, а затем из слабоструктуризованной в структуризованную. При этом выбор метода решения проблемы определяется ее местом в таблице классификаций.
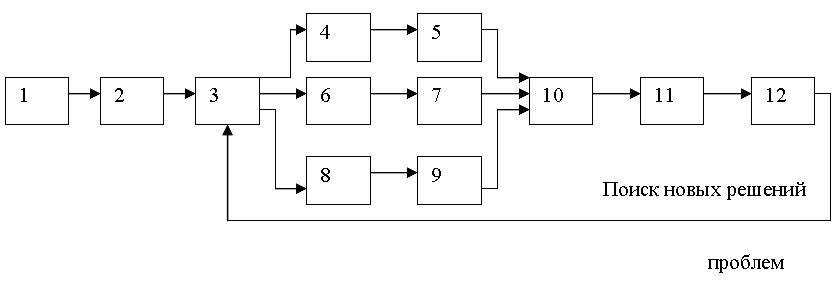
выявление проблемы;
постановка проблемы;
решение проблемы;
неструктуризованная проблема (может решаться с помощью эвристических методов);
методы экспертных оценок;6)слабо структуризованная проблема;7) методы системного анализа; 8)хорошо структуризованная проблема; 9)методы исследования операций;10)принятие решения;11)реализация решения;12)оценка решения.
27.1 – Критерии Гурвица, Лапласа
Критерий Гурвица: решение принимается с учетом того, что возможны как благоприятные, так и неблагоприятные внешние условия. При использовании этого критерия требуется указать «коэффициент пессимизма» a - число (в диапозоне от 0 до 1), представляюцее собой субъективную оценку возможности неблагоприятных внешних условий. Если есть основания предполагать, что внешние условия будут неблагоприятными, то a→1. Если неблагоприятные внешние условия маловероятны, то a→0. Оценки альтернатив находятся по формуле:
Для матрицы выигрышей: ГЕ=maxi[a*minj Eij + (1-a)*maxj Eij]
Для матрицы рисков: Гr=mini[a*maxj Rij + (1-a)*minj Rij].
Критерий Лапласа: применяется, если можно предполагать, что все варианты внешних условий равновероятны.
L=max
i(1/m)![]()
27.2 – Эффективность проектируемых систем
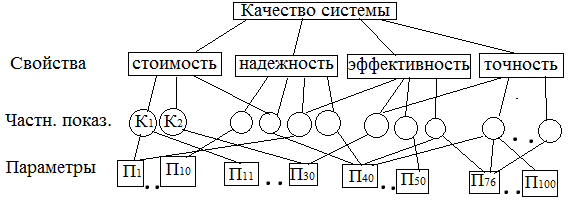
Показатели определяют параметры системы. Качество системы – совокупность свойств, определяющих индивидуальность системы, полезность для пользователей, возможность её использования по назначению.
Эффективность – свойство целенаправленной деятельности.
Эффект – положительный результат действия системы.
С точки зрения оценки эффективности все оценки делятся на 2 класса:
Системы длительного действия;
Системы кратковременного действия.
28.1 - Ранжирование структур с использованием функции штрафа
Исходной
является матрица ||Kij||.
Функция штрафа ![]() ,
где
,
где ![]() – вес j-ого
показателя.
– вес j-ого
показателя.
Исходя
из разброса вектора оценки ![]() – безразмерная оценка
– безразмерная оценка ![]()
Этапы методики:
|| || ->

Вычислим оценку
 ;
;
 ,
где
,
где 
Формируется матрица взвешенных оценок ||
 ||
||
![]() ,
,
![]() ,
,
Для всех стр-р определяется комплексная оценка
Ранжирование стр-р в порядке возрастания штрафа
28.2 – Ранжирование структур с использованием функции штрафа
Методика служит для ранжирования структур по их предпочтительности на основе матрицы векторных оценок [Kji].
Для комплексной оценки структур используется функция штрафа.
qi = ϑj/pji → min(i = 1,n),
где ϑj — веса частных критериев, исходя из разброса векторных оценок, pji — безразмерные векторные оценки, направленные к максимуму.
Приведенный критерий имеет смысл штрафа за возрастание разброса векторных оценок и снижения их значения, т.е. лучшей является та структура, которой соответствует меньший штраф. Методика скаляризации векторных оценок включает следующие процедуры:
Матрица векторных оценок Kji приводится к безразмерному виду (см. предыдущую методику — ф-лы для pji):
pji = Kji/max(Kji) для Kj → max, i∈1,n
pji = min(Kji)/Kji для Kj → min, i∈1,n
Находятся веса частных критериев
ϑj = Zj/∑Zj, j = 1,m
здесь Zj = [(1/n)⋅(∑[Sji - Sji^])]/Sji^
Sji^ = ∑pji/pji
Формируется матрица взвешенных оценок. Вычисляем оценки
eji = ϑj/pji (j =1,m, i = 1,n)
Для всех структур строятся комплексные оценки
qi = ∑lji, i = 1,n
Выполняется ранжирование структур, причем структуры располагаются в порядке возрастания штрафа на основе комплексных оценок qi.
29.1 - Общая задача линейного программирования
Линейное программирование рассматривает задачи с линейной математической моделью. Это задачи, в которых требуется найти такие значения переменных X1, X2,...,Xn, при которых некоторая линейная функция от этих переменных принимает максимальное или минимальное значение:
E = C1X1 + C2X2 + ... + CnXn → max / min (1.1)
при выполнении ограничений на переменные X1, X2,...,Xn, заданных линейными
уравнениями или неравенствами:
а11х11 + а12х12 +…+ а1nxn, < b1
ak1x1 + ak2x2 +…+ aknxn > bk (1.2)
am1x1 + am2x2 +…+ amnxn = bm
х = (х1,х2…,хn)
х1,х2…,хn > 0
Функция (1.1) называется целевой функцией, а ограничения (1.2) – системой ограничений задачи.
Если по условию задачи требуется найти такие значения переменных
X1, X2,...,Xn, при которых целевая функция (1.1) будет иметь максимальное значение, то говорят, что целевая функция подлежит максимизации (или направлена на макс). Если требуется, чтобы целевая функция принимала минимальное значение, то говорят, что она подлежит минимизации (направлена на min).
Если система (1.2) состоит из уравнений и неравенств это общая задача лин. прогр(ОЗЛП).Если система (1.2) состоит из одних неравенств, то это наз. стандартной задачей ЛП. Если система (1.2) состоит только из уравнений- это наз. канонической (основной задачей).
Приведение задачи к ОЗЛП сопряжено с увеличением числе переменных и уравнений.
Любые значения переменных X1,X2,...,Xn, удовлетворяющие ограничениям
задачи (1.2), называются допустимыми решениями (независимо от того, какое значение при этом принимает целевая функция). Большинство задач имеет бесконечно много допустимых решений. Все множество допустимых решений представляет собой область допустимых решений (ОДР).
Допустимые значения переменных X1,X2,...,Xn, при которых целевая функция принимает максимальное или минимальное значение (в зависимости от постановки задачи), представляют собой оптимальное решение.
Для определения начального решения k-m переменных принимаются равными нулю. Тогда в системе из m равенств остается m переменных (неизвестных); в этом
случае их значения можно определить однозначно. Эти значения используются в качестве начального решения задачи. Переменные, значения которых принимаются равными нулю, называются небазисными, остальные – базисными. Количество базисных переменных (переменных, составляющих базис), всегда равно количеству ограничений (m).
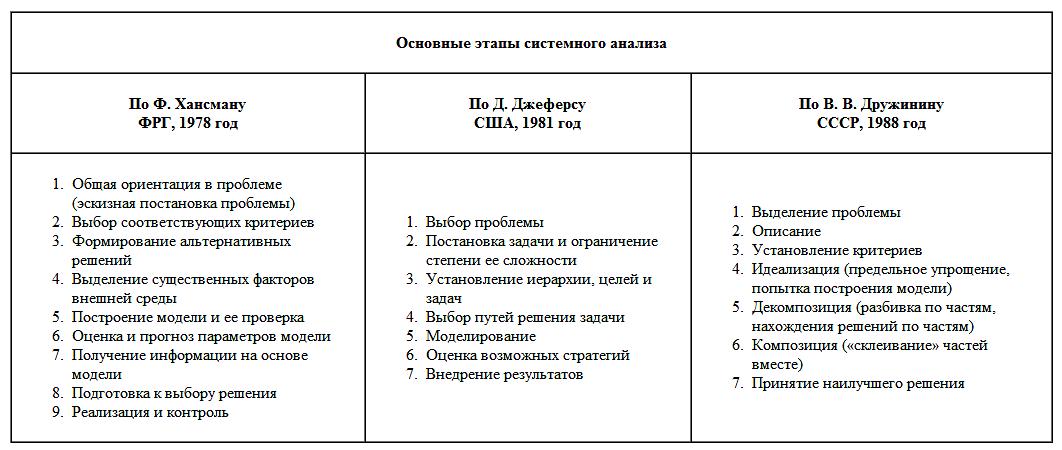
29.2 - Основные этапы системного анализа
СА предусматривает: разработку системного метода решения проблемы, т.е. логически и процедурно организованную последовательность операций, направленных на выбор предпочтительной альтернативы решения. СА реализуется практически в несколько этапов, однако в отношении их числа и содержании пока еще нет единства, т.к. Э большое разнообразие прикладных проблем.
Приведем таблицу, которая иллюстрирует основные закономерности СА з-х различных научных школ
В научный инструментарий СА входят следующие методы:
метод сценариев (пытаются дать описание системы)
метод дерева целей (есть конечная цель, она разбивается на подцели, подцели на проблемы и т.д., т.е. декомпозиция до задач, которые мы можем решить)
метод морфологического анализа (для изобретений)
методы экспертных оценок
вероятностно-статистические методы (теория МО, игр и т.д.)
кибернетические методы (объект в виде черного ящика)
методы ИО (скалярная opt)
методы векторной оптимизации
методы имитационного моделирования (например, GPSS)
сетевые методы
матричные методы
методы экономического анализа и др.
В процессе СА на разных его уровнях применяются различные методы, в которых эвристика сочетается с формализмом. СА выполняет роль методологического каркаса, объединяющего все необходимые методы, исследовательские приемы, мероприятия и ресурсы для решения проблем.
30.1 - Основная задача линейного программирования
Линейное программирование рассматривает задачи с линейной математической моделью. Дана система уравнений:
а11х11 + а12х12 +…+ а1nxn, < b1
ak1x1 + ak2x2 +…+ aknxn > bk (1)
am1x1 + am2x2 +…+ amnxn = bm
И имеется линейная целевая функция:
F= C1X1 + C2X2 + ... + CnXn → max / min (2)
Необходимо найти такое решение Х= (х1,х2…,хn), где х1,х2…,хn > 0 (3), которое удовлетворяло бы системе (1) и обеспечивало бы оптимум(экстремум min или max) уравнения (2).
Основная задача ЛП – это задача нахождения оптимального решения уравнения (2) при удовлетворении условиям системы (1) и неравенства (3).
Для решения общей и стандартной ЗЛП, их приводят к ОЗЛП, что сопряжено с увеличением числа переменных и уравнений.
Любые значения переменных X1,X2,...,Xn, удовлетворяющие системе(1), называются допустимыми решениями (независимо от того, какое значение при этом принимает целевая функция). Большинство задач имеет бесконечно много допустимых решений. Все множество допустимых решений представляет собой область допустимых решений (ОДР).
30.2 - Классификация задач принятия решений
Наиболее общими и существенными признаками классификации задач принятия решений являются:
1. Степень определенности информации.
• Задачи принятия решений в условиях определенности.
• Задачи принятия решений в условиях вероятностной определенности (в условиях риска).
• Задачи принятия решений в условиях неопределенности.
2. Использование эксперимента для получения информации.
• Задачи принятия решений по априорным данным.
• Задачи принятия решений по апостериорным данным.
3. Количество целей.
• Одноцелевые задачи принятия решений.
• Многоцелевые задачи принятия решений.
4. Количество лиц, принимающих решение.
• Индивидуальные задачи принятия решений.
• Групповые задачи принятия решений.
5. Содержание решений.
• Экономические задачи принятия решений.
• Политические задачи принятия решений.
• Военные задачи принятия решений.
• Другие виды.
6. Значимость и длительность действия решений.
• Долговременные задачи принятия решений.
• Среднесрочные задачи принятия решений.
• Краткосрочные задачи принятия решений.