

41. Синтез двухконтурных каскадных систем регулирования с использованием метода модального оптимума.
Вопрос: Можно ли опираясь на знания синтезировать систему с дифференциатором? Ответ:

Вопрос: в силу каких причин приходится использовать многоконтурные системы регулирования?
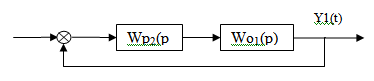
Ответ: объекты регулирования (ОР) могут включать звенья запаздывания и иметь существующую инерционность. Для качественного управления такими объектами одноконтурных систем уже недостаточно. Возникает необходимость введения так называемых дополнительных информационных каналов в промежуточных точках объекта управления. В рассм. схеме таким дополнительным каналом является величина Y1(t).
Если имеется возможность, то датчик, измеряющий дополнительную регулируемую величину Y1 устанавливают ближе ко входу объекта.
Синтез многоконтурных систем начинается с внутреннего контура.
Wвнутр(p)=1/(2(σвн)2p2+2σвнp+1)
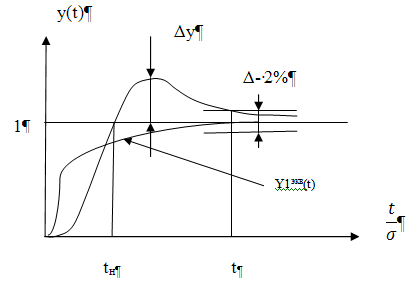
Tн = 4,7 σвн
Tp = 8,4 σвн
Wвнутрэкв(p)=1/(σвнэквp+1), σвнэкв=2σвн

Wo2(p)=Ko2/((To21p+1)Пi=2n(To2ip+1))
Предположим, что σвнэкв > To21p. Такую σ компенсировать нельзя.
Реально датчик, измеряющий регулирующую величину, располагается в обратной связи системы.
Xзд(t) Y1(t)

При синтезе системы, датчик относят к объекту регулирования.

Примечание: когда выполняется моделирование системы, то датчик возвращается на обратное место.
Вопрос: для управления какими объектами используется подобная система регулирования? Ответ: с запаздыванием и существенной инерционностью.
42. Модификация метода модального оптимума.
Знаем, что метод модального оптимума приводит к получению стандартной передаточной функции замкнутой системы, которая зависит от σ – сумма малых постоянных времени.

ξ связан с одним из прямых показателей качества, а именно с перерегулированием.

Попытаемся ввести коэффициент дэмпфирования в формулу для расчёта коэффициента усиления ПИ или ПИД регулятора. Если удастся, то получим возможность варьируя коэффициент ξ получать любое перерегулирование.





43. Синтез систем с дифференцированием сигнала из промежуточной точки на основе метода модального оптимума и упредителя Смита.
Схема с упредителем Смита:


 (p)*
(p)*

Вкл. упредителем Смита в схему дает: запаздывание как бы выноситься за контур регулирования т синтез рег-р можно с исп. Методов синтеза для объектов без запаздывания. Обоснуем это утверждения на основе формулы Мейсона:

Ф=1- …
…
n=1
 =
= (p)*
(p)*
n=3
 =
= (p)*
(p)*
 =
=
= *
*
Ф=
1+ (
*
(
* *
)=1+
*
)=1+
= эта функция соответствует след структурной
схеме:
эта функция соответствует след структурной
схеме:
(p)
 (p)*
=
(p)*
= *
* (
(



 ;
;

44. Синтез систем регулирования методом симметричного оптимума. Критерий оптимизации. Базовая передаточная функция. Вывод условий оптимизации.
Кр= (T1 )/4Ko๙- лин. Оптимум
Обьект управления кроме инерционных звеньев первого порядка может вкл. и интегрирующие звенья. В этом случае использование модального оптимума уже нельзя.
В методе симметричного оптимума исп. Такой же критерий как и в методе мод. оптимума
Опр. АЧХ замкнутой системы



Выведем аналит. выраж. для АЧХ з.с. в соответствии с базовой перед. ф-цией

Условия оптимизации
 ;
;
 если эти условия выполняются, то хотя
бы на о-ой частоте график АЧХ з.с. равен
1
если эти условия выполняются, то хотя
бы на о-ой частоте график АЧХ з.с. равен
1
45. Синтез систем регулирования методом симметричного оптимума. Выбор типа регулятора и параметров его настройки, когда объект включает одно интегрирующее звено и n инерционных звеньев с соизмеримыми постоянными времени.
 ;
;

В
этом
случае целесообразно использовать ПИД
регулятор:
 ;
;


 и
подставим в
и
подставим в

 ;
;
y(t)


2% 




 =>
=>

Компенсировать
большую инерционность
 можно
можно


Большое перерегулирование обусловлено тем, что числитель обладает дифференцирующими свойствами (упреждением).
46. Синтез систем регулирования методом симметричного оптимума. Выбор типа регулятора и параметров его настройки, когда объект включает одно интегрирующее звено и n инерционных звеньев одно из которых имеет существенно большую постоянную времени.
(начало смотри вопрос 45)
Выбор типа регулятора и параметров его настройки, когда объект включает одно интегрирующее звено и n инерционных звеньев одно из которых имеет существенно большую постоянную времени.


Компенсировать
большую инерционность T1
можно за счёт соответственно выбора
постоянной дифференцирования
 .
.

Отметим, что полученная передаточная функция разомкнутой системы имеет тот же вид, что и в предыдущем случае, если применить условие оптимума, то получим те же Кр Ти. В итоге получим стандартный вид передаточной функции. (смотри вопрос 45)
Отметим, что перерегулирование >43% в реальных системах, за редким исключением недопустимо.