

6.3. Классификация дисс по виду излучаемого сигнала
Используются различные режимы работы ДИСС, различающиеся видом модуляции излучаемых колебаний:
– непрерывные немодулированные колебания (непрерывный режим);
– непрерывные частотно-модулированные колебания (режим частотной модуляции – ЧМ);
– непрерывно-импульсные колебания со скважностью два (непрерывно-импульсный режим);
– импульсные колебания со скважностью более двух (импульсный режим).
По способу выделения доплеровского спектра ДИСС подразделяются на когерентные и автокогерентные. В когерентных ДИСС отраженный сигнал сравнивают по частоте с сигналом передатчика. В результате их взаимодействия выделяется доплеровский сдвиг. В автокогерентных ДИСС для выделения доплеровского спектра взаимодействуют между собой сигналы, отраженные от двух различных участков поверхности (сигналы, полученные и принятые по двум различным лучам).
Первые три из названных режимов работы являются когерентными, импульсный режим – автокогерентным. На воздушных судах гражданской авиации применяют только когерентные ДИСС, с непрерывным режимом генерации и излучения, либо без модуляции, либо с частотой модуляцией.
6.4. Доплеровский измеритель дисс-013
Доплеровский
измеритель ДИСС-013 предназначен для
непрерывного автоматического измерения
путевой скорости и угла сноса. Информация
о
![]() и
и![]() поступает на собственный индикатор, в
навигационный вычислитель и в систему
автоматического управления САУ и
используется для самолетовождения по
заданному маршруту над любым видом
подстилающей поверхности независимо
от оптической видимости. Устанавливают
ДИСС на самолетах ТУ-134, ТУ-154, ИЛ-62.
поступает на собственный индикатор, в
навигационный вычислитель и в систему
автоматического управления САУ и
используется для самолетовождения по
заданному маршруту над любым видом
подстилающей поверхности независимо
от оптической видимости. Устанавливают
ДИСС на самолетах ТУ-134, ТУ-154, ИЛ-62.
Эксплуатационно-техническая характеристика
Диапазон измеряемых путевых скоростей 180–1300
То же углов сноса, угловые градусы ±
Рабочий диапазон высот, м 10–15000
Погрешность измерения путевых скоростей
(2![]() ),
% 0,4
),
% 0,4
Погрешность измерения угла сноса, угловые минуты 20
Частота передатчика, МГц 8800
Масса 27,5
Доплеровский измеритель ДИСС-013, блок связи и навигационный вычислитель образуют доплеровскую систему навигации. В зависимости от типа навигационного вычислителя и блоков связи на самолетах устанавливаются следующие доплеровские системы навигации;
ДИСС-013-134 предназначен для самолетов ТУ-134, ТУ-134А, Ту-134Б с навигационным вычислителем АНУ-1К
ДИСС-013-154 – для самолетов ТУ-154, ТУ-154А, ТУ-154Б с навигационным вычислителем НВУ-Б3;
ДИСС-013-С1 – для самолетов ИЛ-62, ИЛ-62М.
6.5. Бортовой навигационный комплекс самолета ил-62
БНК-62 является сложной системой, объединяющей разнообразное навигационное и радионавигационное оборудование самолета ИЛ-62.
БНК предназначен для решения задач навигации при полетах по воздушным трассам и вне трасс в любых физико-географических условиях в любое время суток и года. Совместно с бортовой системой управления БНК обеспечивает автоматическое управление полетом самолета в горизонтальной плоскости по маршруту от аэродрома вылета до аэродрома посадки.
БНК обеспечивает:
– непрерывное
определение места самолета (МС) методом
счисления пути в главных (![]() )
и частных (
)
и частных (![]() )
ортодромических системах координат в
пределах: по оси
)
ортодромических системах координат в
пределах: по оси![]() от –9000 до +1000 км; по осям
от –9000 до +1000 км; по осям![]() от –600 до +600 км. (В главной ортодромической
системе координат главная ортодромия
проходит через исходный и конечный
пункт маршрута. В частных ортодромических
системах координат начало координат
совмещается с промежуточных пунктом
маршрута, находящимся в конце каждого
этапа маршрута.) БНК имеет основной и
вспомогательный режимы счисления. В
основном режиме счисление выполняется
по данным ТКС (точной курсовой системы),
СВС (системы воздушных сигналов) и
запомненным или вводимым параметрам
ветра;
от –600 до +600 км. (В главной ортодромической
системе координат главная ортодромия
проходит через исходный и конечный
пункт маршрута. В частных ортодромических
системах координат начало координат
совмещается с промежуточных пунктом
маршрута, находящимся в конце каждого
этапа маршрута.) БНК имеет основной и
вспомогательный режимы счисления. В
основном режиме счисление выполняется
по данным ТКС (точной курсовой системы),
СВС (системы воздушных сигналов) и
запомненным или вводимым параметрам
ветра;
– автоматизированное управление заходом на посадку по заданной схеме и полетом по прямоугольному маршруту при повторном заходе на посадку;
– полет по кратчайшему расстоянию в любую запрограммированную точку маршрута;
– автоматическую коррекцию счисленных координат самолета по данным радиотехнических систем ближней навигации (РСБН, VOR, DME).
Погрешность (2![]() )
определения МС не превышает 2% пройденного
пути при условии коррекции МС по данным
РСБН не реже, чем через 400 км.
)
определения МС не превышает 2% пройденного
пути при условии коррекции МС по данным
РСБН не реже, чем через 400 км.
Состав оборудования БНК и его взаимосвязи иллюстрируются рис. 6.8.
Навигационный вычислитель (НВ) выполняет все операции, необходимые для решения навигационных задач, в частности:
– программирование планируемого полета путем задания координат ППМ (промежуточных пунктов маршрута), точек предпосадочного маневра (ТПМ) и ОЗПУ (ортодромического заданного путевого угла) частных ортодромий;
– вычисление
составляющих вектора
![]() по упрощенным алгоритмам (6.9), т.е. без
учета влияния крена и тангажа;
по упрощенным алгоритмам (6.9), т.е. без
учета влияния крена и тангажа;
– счисление пути по алгоритмам (6.1);
– взаимопреобразование частных и главных ортодромических координат;
– автоматическую коррекцию счисленных координат по данным РСБН;
– формирование и выдачу в систему автоматического управления самолетом САУ 1Т сигналов для автоматизированного самолетовождения в горизонтальной плоскости.
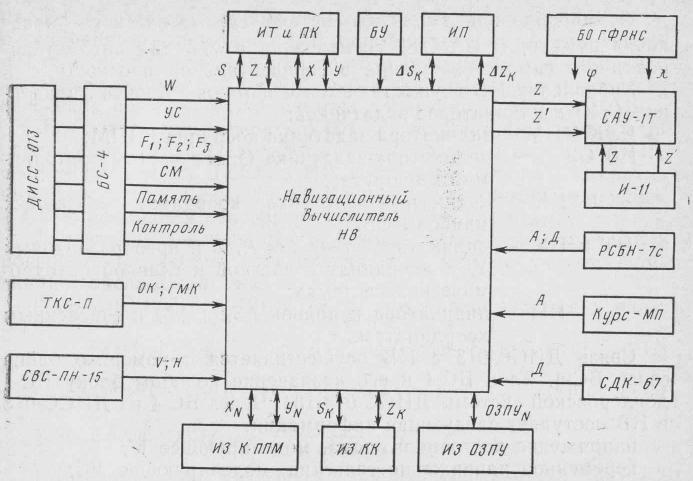
Рис. 6.8. Структурная схема БНК самолета ИЛ-62
Управление НВ осуществляется с помощью блоков управления (БУ) и индикаторов задатчиков:
ИЗК ППМ – индикатора-задатчика координат ППМ;
ИЗ ОЗПУ – индикатора-задатчика ОЗПУ частных ортодромий маршрута;
ИЗКК – индикатора-задатчика координат наземных маяков РСБН;
ИТ и ПК – индикатора
текущих
![]() и преобразованных
и преобразованных![]() координат в частной и главной
ортодромических системах;
координат в частной и главной
ортодромических системах;
ИП – индикатора
поправок
![]() и
и![]() к счисленным координатам.
к счисленным координатам.
Связь ДИСС-013 с НВ осуществляется с помощью блока связи БС-4. Через БС-4 из ДИСС-013 в НВ поступает следующая информация:
– напряжение
постоянного тока, моделирующее
![]() ;
;
– переменное
напряжение сельсина, моделирующее
![]() ;
;
– импульсы
напряжения с частотами слежения
![]() ;
;
– сигнал СУША–МОРЕ;
– сигнал ПАМЯТЬ;
– сигнал КОНТРОЛЬ.
На структурной
схеме БНК показаны инерциальная
навигационная система И-11 (ИНС) и бортовое
оборудование глобальной фазовой
радионавигационной системы БО ГФРНС.
С помощью ИНС осуществляется счисление
пути, и ее сигналы могут использоваться
в САУ вместе с управляющими сигналами
НВ. БО ГФРНС непрерывно выдает
географические координаты
![]() и
и![]() места самолета с погрешностью (2
места самолета с погрешностью (2![]() )
8 км. Эти данные используются для ручной
коррекции счисления пути при полетах
над протяженными водными поверхностями
или по любым другим трассам, не обеспеченным
РСБН.
)
8 км. Эти данные используются для ручной
коррекции счисления пути при полетах
над протяженными водными поверхностями
или по любым другим трассам, не обеспеченным
РСБН.