

Раздел 3. Навигационные элементы
План раздела:
3.1. Навигационные системы координат;
3.1.1. Местные навигационные системы координат;
3.1.2. Глобальные системы координат;
3.2. Линии и поверхности положения. Линии пути;
3.3. Карты и картографические проекции;
3.3.1. Классификация и назначение авиационных карт;
3.3.2. Сущность картографических проекций и их классификация;
3.4. Курс и курсовые углы;
3.5. Навигационный треугольник скоростей.
3.1. Навигационные системы координат
В зависимости от масштабов перемещений системы отсчета могут быть местными, глобальными и космическими.
3.1.1. Местные навигационные системы координат
Местные системы координат (СК) используются в качестве систем отсчета при сравнительно небольших перемещениях, когда кривизной Земли можно пренебречь. По своей форме они могут быть:
– декартовы прямоугольные координаты;
– цилиндрические;
– сферические.
По ориентации осей местные СК можно разделить на:
– горизонтальные сферические;
– произвольные в азимуте;
– произвольные в пространстве.
В
горизонтальной
сферической СК
за основную плоскость отсчета принята
горизонтальная, перпендикулярная к
линии отвеса. Положения ЛА (точка М) в
этой СК определяется сферическими
координатами; высотой
![]() ,
азимутом
,
азимутом![]() и длиной радиуса-вектора
и длиной радиуса-вектора![]() (рис. 3.1).
(рис. 3.1).
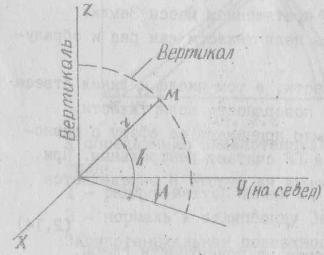
Рис. 3.1. Горизонтальная сферическая система координат
Высота
отсчитывается как угол
![]() между горизонтальной плоскостью и
направлением радиуса-вектора
между горизонтальной плоскостью и
направлением радиуса-вектора![]() (положительное направление отсчета –
вверх на горизонтальной плоскостью,
отрицательное – вниз). Азимут
(положительное направление отсчета –
вверх на горизонтальной плоскостью,
отрицательное – вниз). Азимут![]() отсчитывается в горизонтальной плоскости
от северного направления географического
меридиана по часовой стрелке до
горизонтальной проекции радиус-вектора.
Вертикальная плоскость, проходящая
через радиус-вектор, называется
вертикалом. Данная СК удобна для
использования при полетах в районе
аэродрома.
отсчитывается в горизонтальной плоскости
от северного направления географического
меридиана по часовой стрелке до
горизонтальной проекции радиус-вектора.
Вертикальная плоскость, проходящая
через радиус-вектор, называется
вертикалом. Данная СК удобна для
использования при полетах в районе
аэродрома.
В горизонтальной цилиндрической (полярной) положение ЛА определяется в плоскости горизонта полярным (азимутальным) углом, радиусом-вектором и высотой над поверхностью Земли. Использование этой СК в навигационной системе счисления пути позволяет весьма просто осуществлять управление объектом из любой точки пространства непосредственно к заданной цели.
Произвольная
в азимуте горизонтальная СК располагается
в точке старта или финиша таким образом,
чтобы одна из осей (например,
![]() )
была направлена в горизонтальной
плоскости, например, по предполагаемой
линии пути, а другая (
)
была направлена в горизонтальной
плоскости, например, по предполагаемой
линии пути, а другая (![]() )
– по вертикали.
)
– по вертикали.
СК с произвольной ориентацией осей может быть ориентирована относительно земного пространства таким образом, чтобы наиболее полно удовлетворять какой-либо конкретной навигационной задаче.
Местные СК находят широкое применение при счислении пути на небольшие расстояния порядка десятков и сотен километров, при управлении объектами в период взлета или посадки, при определении местонахождения относительно ориентиров, целей и промежуточных пунктов маршрута и т.п.
3.1.2. Глобальные системы координат
Глобальные СК жестко связаны с Землей и используются для навигации, охватывающей всю земную поверхность и околоземное пространство. Наиболее распространенными СК являются географическая (геодезическая), геоцентрическая (нормально сферическая) и ортодромическая (рис. 3.2).
|
|
|
|
|
а – географическая (геодезическая) СК |
б – геоцентрическая (нормально сферическая) СК |
в – ортодромическая СК |
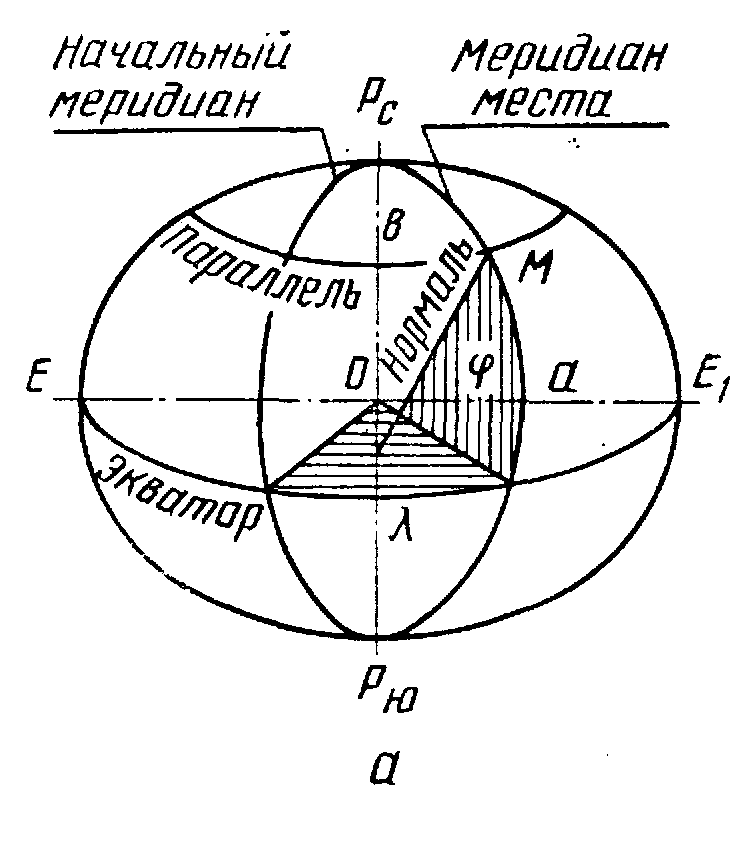
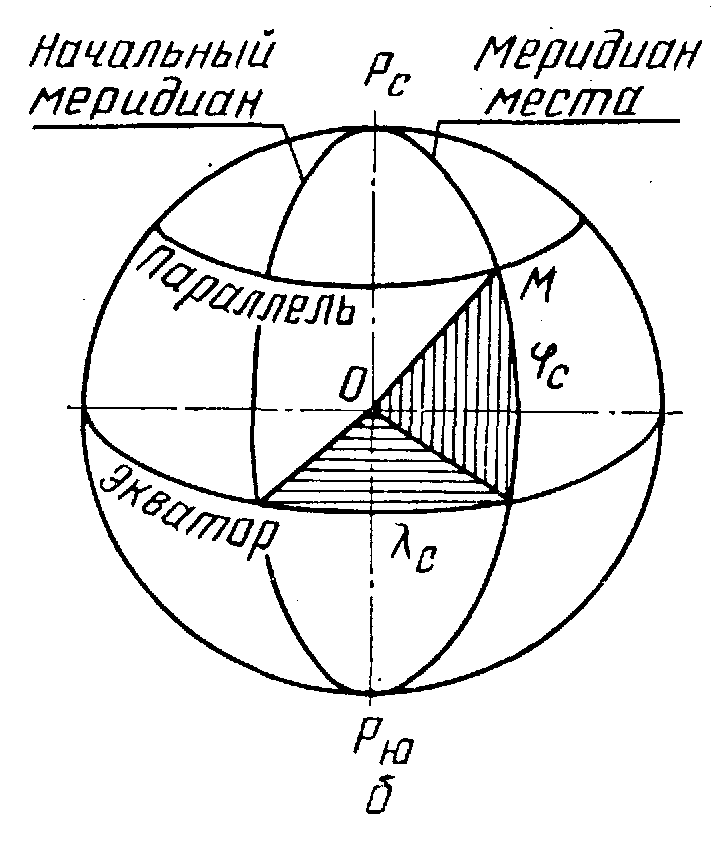
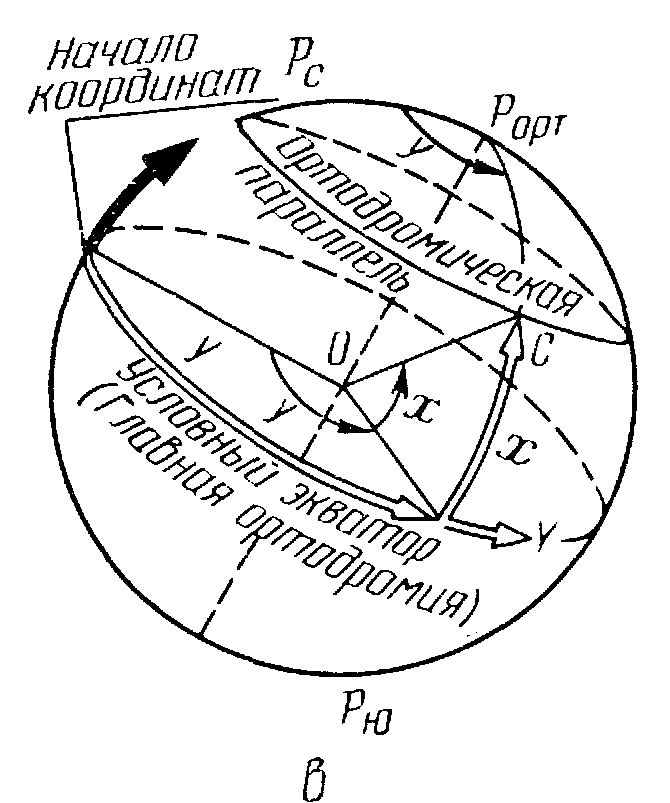
Рис. 3.2. Глобальные системы координат
В
географической
СК (рис. 3.2,а) используется земной геоид
и за основную плоскость отсчета принята
плоскость экватора. Географическая
(геодезическая) широта
![]() определяется как угол между плоскостью
экватора и отвесной линией (эта линия
не проходит через центр Земли). Долгота
определяется как угол между плоскостью
экватора и отвесной линией (эта линия
не проходит через центр Земли). Долгота![]() определяется как двугранный угол между
плоскостью, образованной Гринвичским
меридианом и меридианом, проходящим
через точку М местонахождения ЛА.
определяется как двугранный угол между
плоскостью, образованной Гринвичским
меридианом и меридианом, проходящим
через точку М местонахождения ЛА.
Геоцентрическая
СК отличается от географической способом
отсчета широты. В геоцентрической СК
Земля принимается за шар, а отсчет
геоцентрической широты
![]() производится между плоскостью экватора
и направлением радиус-вектора
производится между плоскостью экватора
и направлением радиус-вектора![]() .
Способ отсчета геоцентрической долготы
.
Способ отсчета геоцентрической долготы![]() совпадает со способом отсчета
географической долготы.
совпадает со способом отсчета
географической долготы.
Переход от географической СК к геоцентрической осуществляется с помощью соотношения
![]() ,
,
![]() . (3.1)
. (3.1)
В
ортодромической
СК за основную плоскость отсчета
принимают плоскость большого круга
(ортодромию), а форму Земли – сферической.
По существу эта СК по способу определения
места ЛА аналогична геоцентрической,
но отличается тем, что ее экватор и ось
полюсов
![]() повернуты относительно земного экватора
на определенный угол. Положение
ортодромической системы относительно
географической или геоцентрической
задается двумя координатами полюса
ортодромии
повернуты относительно земного экватора
на определенный угол. Положение
ортодромической системы относительно
географической или геоцентрической
задается двумя координатами полюса
ортодромии![]() .
Местонахождение ЛА определяется
ортодромической широтой
.
Местонахождение ЛА определяется
ортодромической широтой![]() ,
долготой
,
долготой![]() ,
геоцентрическим радиусом-вектором
,
геоцентрическим радиусом-вектором![]() и геоцентрической широтой и долготой
полюса ортодромии
и геоцентрической широтой и долготой
полюса ортодромии![]() ,
,![]() .
Ортодромическая система координат
удобна тем, что она позволяет осуществить
навигацию от места старта до финиша по
кратчайшему расстоянию – ортодромии.
Для этого экватор ортодромической СК
надо совместить с дугой большого круга,
проходящего через точки старта и финиша
на земной сфере.
.
Ортодромическая система координат
удобна тем, что она позволяет осуществить
навигацию от места старта до финиша по
кратчайшему расстоянию – ортодромии.
Для этого экватор ортодромической СК
надо совместить с дугой большого круга,
проходящего через точки старта и финиша
на земной сфере.
При навигации ряда объектов применяются цилиндрические и прямоугольные декартовы СК, начало которых совмещено с центром Земли. Ориентация их координатных осей может совпадать с основными географическими направлениями (экватор, ось полюсов Земли, Гринвичский меридиан) или быть произвольной, подчиненной задачам навигации. Если навигация осуществляется не относительно Земли, а относительно какой-либо другой планеты или небесного тела, то в этом случае удобно применять аналогичные СК, связанные с этими небесными телами.
При использовании астрономических датчиков навигационной информации используются астрономические СК, основными из которых являются экваториальная и горизонтальная системы координат. Они тоже относятся к сферическим СК.
Кроме них, существует идеализированная СК – инерциальная. Она характеризуется поступательным, равномерным, и прямолинейным движением относительно звездного пространства.