

9.1.2. Фазовые дальномерные рсдн
Принцип действия
фазовой дальномерной системы.
Предположим, что ОС (одна из которых
показана на рис. 9.2) непрерывно излучают
навигационный сигнал в виде немодулированных
колебаний частоты
![]() .
Источником сигнала служит высокостабильный
эталонный генератор ЭГ, а требуемая
мощность обеспечивается усилителем
УМ. Принятый потребителем П сигнал
поступает на УРЧ, а с него – на измеритель
фаз ИФ. В качестве опорных используются
колебания, вырабатываемые генератором
ОГ. Сигнал ОГ должен быть когерентным
с излучаемым ОС навигационным сигналом.
Предположим далее, что фазовая скорость
распространения радиоволн постоянная,
а доплеровский сдвиг частоты отсутствует.
.
Источником сигнала служит высокостабильный
эталонный генератор ЭГ, а требуемая
мощность обеспечивается усилителем
УМ. Принятый потребителем П сигнал
поступает на УРЧ, а с него – на измеритель
фаз ИФ. В качестве опорных используются
колебания, вырабатываемые генератором
ОГ. Сигнал ОГ должен быть когерентным
с излучаемым ОС навигационным сигналом.
Предположим далее, что фазовая скорость
распространения радиоволн постоянная,
а доплеровский сдвиг частоты отсутствует.
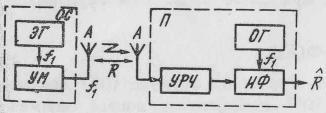
Рис. 9.2. Структурная схема аппаратуры опорной станции и потребителя фазовой дальномерной системы
Тогда в некоторый
момент
![]() на ИФ поступает сигнал ОС
на ИФ поступает сигнал ОС
![]() , (9.6)
, (9.6)
где
![]() – начальная фаза;
– начальная фаза;![]() – сдвиг сигнала по фазе в цепях приемника,
а
– сдвиг сигнала по фазе в цепях приемника,
а![]() .
Фаза
.
Фаза![]() навигационного сигнала в ИФ сравнивается
с фазой
навигационного сигнала в ИФ сравнивается
с фазой![]() опорного сигнала
опорного сигнала
![]() . (9.7)
. (9.7)
Измеренная разность фаз
![]() . (9.8)
. (9.8)
Информация о
дальности
![]() до ОС заключена в первой составляющей
до ОС заключена в первой составляющей![]() .
Остальные составляющие должны быть
известны и учтены при измерении. При
выполнении этого требования
.
Остальные составляющие должны быть
известны и учтены при измерении. При
выполнении этого требования![]() и основное уравнение фазового дальномера
принимает вид
и основное уравнение фазового дальномера
принимает вид
![]() . (9.9)
. (9.9)
Для уменьшения
погрешности определения дальности
![]() при заданном значении погрешности
при заданном значении погрешности![]() необходимо уменьшать масштабный
коэффициент, т.е. работать на возможно
более высоких несущих частотах. Однако
при больших
необходимо уменьшать масштабный
коэффициент, т.е. работать на возможно
более высоких несущих частотах. Однако
при больших![]() возникает многозначность отсчета фазы,
когда
возникает многозначность отсчета фазы,
когда
![]() , (9.10)
, (9.10)
где
![]() – неизвестное целое число, а
– неизвестное целое число, а![]() – показания измерителя фаз (рис. 9.3).
– показания измерителя фаз (рис. 9.3).
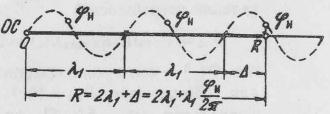
Рис. 9.3. Связь дальности и измеряемого фазового сдвига в фазовой дальномерной системе
Разрешение
многозначности.
Определение
![]() основано в фазовых РСДН на многошкальном
методе, при котором формируется грубая
шкала на разностной частоте и используется
однозначная, но не очень точная, информация
о местоположении от системы счисления
координат потребителя.
основано в фазовых РСДН на многошкальном
методе, при котором формируется грубая
шкала на разностной частоте и используется
однозначная, но не очень точная, информация
о местоположении от системы счисления
координат потребителя.
Система счисления
находит положение точки П (рис. 9.4,а) с
СКП
![]() .
Положение точки П в зоне неопределенности
системы счисления, равной
.
Положение точки П в зоне неопределенности
системы счисления, равной![]() ,
уточняется по результатам измерений
фазы на разностной частоте
,
уточняется по результатам измерений
фазы на разностной частоте![]() ,
где
,
где![]() и
и![]() – близкие к друг другу частоты опорных
станций. Если измерить фазы навигационных
сигналов с частотами
– близкие к друг другу частоты опорных
станций. Если измерить фазы навигационных
сигналов с частотами![]() и
и![]() и образовать разность
и образовать разность![]() и
и![]() ,
то
,
то
![]() . (9.11)
. (9.11)
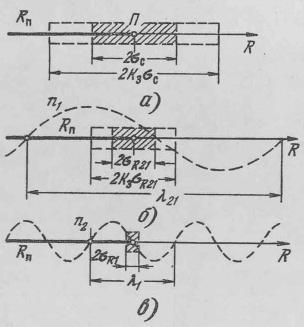
Рис. 9.4. Диаграммы измерения дальности потребителя на грубой (а), средней (б) и
точной (в) шкалах
Формирование
![]() равносильно измерению фазы на низкой
частоте
равносильно измерению фазы на низкой
частоте![]() ,
на которой интервал однозначного
измерения фазы
,
на которой интервал однозначного
измерения фазы![]() ,
а СКП измерения
,
а СКП измерения![]() .
Входящее в (9.10) неизвестное число
.
Входящее в (9.10) неизвестное число![]() определяется как
определяется как![]() ,
где
,
где![]() – дальность, найденная по системе
счисления.
– дальность, найденная по системе
счисления.
Для сопряжения
шкалы, формируемой системой счисления
с более точной шкалой (рис. 9.4,б),
организованной на частоте
![]() ,
т.е. для предотвращения потери информации
о дальности
,
т.е. для предотвращения потери информации
о дальности![]() (о числе
(о числе![]() )
при переходе на более точную (но
неоднозначную) шкалу, необходимо
выполнить условие
)
при переходе на более точную (но
неоднозначную) шкалу, необходимо
выполнить условие
![]() , (9.12)
, (9.12)
где
![]() – погрешность системы счисления, а
– погрешность системы счисления, а![]() – коэффициент запаса. Коэффициент
запаса должен лежать в пределах 4,4…5,3.
По найденному
– коэффициент запаса. Коэффициент
запаса должен лежать в пределах 4,4…5,3.
По найденному![]() можно найти значение разностной частоты
можно найти значение разностной частоты![]() .
.
Затем дальность
уточняют по точной шкале (рис. 9.4,в),
формируемой на несущей шкале
![]() .
При этом условие сопряжения шкал
принимает вид
.
При этом условие сопряжения шкал
принимает вид![]() ,
где
,
где![]() – интервал однозначного измерения
дальности на частоте
– интервал однозначного измерения
дальности на частоте![]() .
Если это условие не выполняется, то
используется промежуточная шкала на
разностной частоте
.
Если это условие не выполняется, то
используется промежуточная шкала на
разностной частоте![]() ,
где
,
где![]() – дополнительная несущая частота ОС
(
– дополнительная несущая частота ОС
(![]() ).
).
Принцип действия
дальномерного варианта систем типа
Omega.
Стандартная система Omega
состоит из восьми ОС (![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() и
и![]() ),
рабочая зона которых перекрывает
практически всю поверхность Земли.
Дальность действия ОС составляет 9…10
тыс. км. Каждая из ОС в известный момент
времени начинает передачу сигналов на
частотах 10,2; 11,3 и 13,6 кГц. Частота
),
рабочая зона которых перекрывает
практически всю поверхность Земли.
Дальность действия ОС составляет 9…10
тыс. км. Каждая из ОС в известный момент
времени начинает передачу сигналов на
частотах 10,2; 11,3 и 13,6 кГц. Частота![]() =10,2
кГц служит для точного определения
местоположения (
=10,2
кГц служит для точного определения
местоположения (![]() км).
На разностных частотах
км).
На разностных частотах![]() кГц и
кГц и![]() кГц устраняется многозначность отсчета
(
кГц устраняется многозначность отсчета
(![]() км
и
км
и![]() км).
км).
В аппаратуре
потребителя (рис. 9.5) поочередно принимаемые
навигационные сигналы ОС поступают с
антенно-фидерного устройства АФУ на
три идентичных, но настроенных на разные
частоты канала К1…К3 (на схеме раскрыт
только канал К1). После усиления в УРЧ,
амплитудного ограничения и узкополосной
фильтрации навигационный сигнал подается
на измеритель фаз ИФ, где его фаза
сравнивается с фазой опорного сигнала,
вырабатываемого генератором ОГ. Генератор
ОГ служит для получения всех частот и
синхросигналов, необходимых для работы
аппаратуры потребителя, и строится на
основе рубидиевого стандарта частоты
(в квазидальномерной аппаратуре может
использоваться генератор с кварцевой
стабилизацией). Результаты измерения
разности фаз сигналов всех ОС относительно
опорного сигнала поступают в ЭВМ
(специализированный процессор), которая
выдает на индикатор И и внешние системы
ВС результат расчета местоположения
потребителя. В ЭВМ производится также
счисление пути по информации о скорости
![]() и курсе
и курсе![]() потребителя, а полученные данные
используются вместе с вычисленными
разностями фаз
потребителя, а полученные данные
используются вместе с вычисленными
разностями фаз![]() и
и![]() для разрешения многозначности. В ЭВМ
могут включаться и отдельные элементы
ИФ. В блоке памяти ЭВМ хранятся данные
о координатах всех ОС и поправки на
непостоянство фазовой скорости
распространения радиоволн.
для разрешения многозначности. В ЭВМ
могут включаться и отдельные элементы
ИФ. В блоке памяти ЭВМ хранятся данные
о координатах всех ОС и поправки на
непостоянство фазовой скорости
распространения радиоволн.
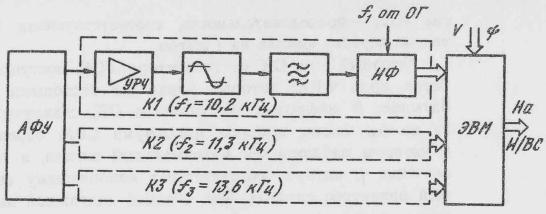
Рис. 9.5. Структурная схема аппаратуры потребителя системы «Omega»