

10.4. Аппаратура потребителей срнс
Рассмотрим основные функции аппаратуры потребителей.
Выбор спутников. Созвездие из четырех рабочих спутников выбирается по критерии минимума геометрического фактора на основании хранящегося в памяти аппаратуры альманаха и грубых данных о местоположении от системы счисления пути или другой навигационной системы.
Поиск сигналов. После выбора спутников в аппаратуре потребителя вырабатываются опорные коды, аналогичные по структуре дальномерным кодам тех НИСЗ, прием сигналов которых ожидается потребителем. Поиск этих сигналов основан на нахождении максимума корреляционной функции принятого и опорного кодов.
Измерение
дальности.
Информация о дальности до НИСЗ извлекается
из задержки принимаемого кода, например
кода
![]() ,
относительно опорного кода. При слежении
за
,
относительно опорного кода. При слежении
за![]() -м
спутником управляемый генератор кода
УГК (рис. 10.8,а) в момент
-м
спутником управляемый генератор кода
УГК (рис. 10.8,а) в момент![]() ,
соответствующий моменту излучения
сигнала НИСЗ, формирует код
,
соответствующий моменту излучения
сигнала НИСЗ, формирует код![]() ,
тактовая частота которого задается
опорным генератором ОГ. Этот код подается
на коррелятор Кор, куда с приемника Прм
поступает также принятый сигнал НИСЗ.
Сигнал ошибки с выхода коррелятора
пропорционален сдвигу
,
тактовая частота которого задается
опорным генератором ОГ. Этот код подается
на коррелятор Кор, куда с приемника Прм
поступает также принятый сигнал НИСЗ.
Сигнал ошибки с выхода коррелятора
пропорционален сдвигу![]() подаваемых на Кор кодов и после усреднения
в фильтре используется для измерения
временного
положения формируемого в УГК кода.
Процесс продолжается до совпадения
кодов по времени (
подаваемых на Кор кодов и после усреднения
в фильтре используется для измерения
временного
положения формируемого в УГК кода.
Процесс продолжается до совпадения
кодов по времени (![]() ),
после чего измеритель времени ИВ
определяет сдвиг опорного кода
),
после чего измеритель времени ИВ
определяет сдвиг опорного кода![]() ,
используя для этого число
,
используя для этого число![]() элементов кода, на которое потребовалось
сдвинуть опорный код.
элементов кода, на которое потребовалось
сдвинуть опорный код.
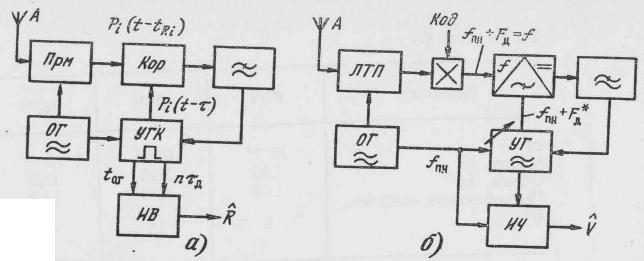
Рис. 10.8. Структурные схемы измерителей дальности (а) и скорости (б) аппаратуры потребителя СРНС
Измерение
скорости. Информация о скорости,
содержащаяся в доплеровском сдвиге
частоты
![]() ,
извлекается с помощью системы ФАПЧ или
АПЧ (рис. 10.8,б). После замыкания цепи
слежения за кодом принятый сигнал с
линейного тракта приемника ЛТП
демодулируется при умножении на
соответствующий данному НИСЗ код и
поступает на дискриминатор следящей
системы. Опорный сигнал с частотой
,
извлекается с помощью системы ФАПЧ или
АПЧ (рис. 10.8,б). После замыкания цепи
слежения за кодом принятый сигнал с
линейного тракта приемника ЛТП
демодулируется при умножении на
соответствующий данному НИСЗ код и
поступает на дискриминатор следящей
системы. Опорный сигнал с частотой![]() формируется управляемым генератором
УГ. Сигнал ошибки фильтруется и управляет
частотой УГ. В установившемся режиме
частота
формируется управляемым генератором
УГ. Сигнал ошибки фильтруется и управляет
частотой УГ. В установившемся режиме
частота![]() ,
и ее значение с выхода измерителя частоты
ИЧ используется как мера скорости.
,
и ее значение с выхода измерителя частоты
ИЧ используется как мера скорости.
10.5. Точность СРНС
Суммарная погрешность СРНС зависит от того, насколько точно известно местоположение спутников в момент измерения; от непостоянства скорости распространения радиоволн; нестабильности бортовых эталонов времени; числа используемых для определения дальности спутников (избыточная информация позволяет повысить точность); уровня помех и от некоторых других факторов.
Неточность информации о местоположении спутников. Координаты спутников передаются в виде эфемерид бортовой аппаратурой НИСЗ по данным, периодически получаемым от наземного комплекса управления. Современный уровень техники позволяет смоделировать факторы, возмущающие движение спутника по орбите (прецессионное движение оси Земли, давление солнечного света и др.), с очень высокой точностью. Поэтому погрешности, вызываемые перечисленными причинами, не превышают несколько метров. Такого же порядка и погрешность, обусловленная неточностью модели земного шара и измерения высоты потребителя.
Непостоянство скорости распространения радиоволн. Изменение этой скорости при распространении в ионосфере и тропосфере приводит к погрешности измерения (погрешность рефракции). Знание природы этих погрешностей позволяет с помощью коррекции снизить их значение до нескольких метров. Остаточная погрешность является следствием приближенности расчетных формул и неточности сведений о параметрах атмосферы.
Точность пассивных дальномерных систем. Дополнительным источником погрешностей в таких системах является недостаточная стабильность частоты бортового генератора потребителя. В последние годы разработаны рубидиевые стандарты частоты, имеющие приемлемые для потребителя массогабаритные характеристики.
Оценка точности СРНС. Моделирование и экспериментальная проверка показывают, что при использовании точного кода средние квадратические погрешности имеют следующие предельные значения (в метрах):
Неточность прогноза параметров НИСЗ 3,9
Неполный учет ионосферной задержки 2,3
Неполный учет тропосферной задержки 2,0
Многолучевой характер распространения 1,2
Погрешность бортового оборудования 1,5
При этом эквивалентная общая погрешность измерения дальности около 6 м, а результирующая погрешность местоопределения примерно 18 м (при геометрическом факторе, равным 3). Погрешности при грубом коде приблизительно на порядок больше. Средняя квадратическая погрешность измерения составляющих скорости 0,1 м/с, а времени – 10 нс.
10.6. Дифференциальный режим
Спутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10–15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м – в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приёмника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приёмник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта.
В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.
В качестве широкозонных стоит отметить такие системы, как американская WAAS, европейская EGNOS и японская MSAS. Эти системы используют геостационарные спутники для передачи поправок всем потребителям, находящимся в зоне их покрытия.
Региональные системы предназначены для навигационного обеспечения отдельных участков земной поверхности. Обычно региональные системы используют в крупных городах, на транспортных магистралях и судоходных реках, в портах и по берегу морей и океанов. Диаметр рабочей зоны региональной системы обычно составляет от 500 до 2000 км. Она может иметь в своём составе одну или несколько опорных станций.
Локальные системы имеют максимальный радиус действия от 50 до 220 км. Они включают обычно одну базовую станцию. Локальные системы обычно разделяют по способу их применения: морские, авиационные и геодезические локальные дифференциальные станции.