

3.4.1. Задача оптимального управления линейными стационарными объектами
Рассмотрим объект управления, движение которого описывается системой линейных дифференциальных уравнений с постоянными коэффициентами:
![]() ,
(i=1,2,…,n) (3.16)
,
(i=1,2,…,n) (3.16)
В векторной форме система уравнений (3.16) запишется:
![]() , (3.17)
, (3.17)
где![]()
![]()
n-мерный
вектор координат состояния;
n-мерный
вектор координат состояния;
![]()
r-мерный вектор управления;
 матрица
размера n×n;
матрица
размера n×n;
 матрица размерности
n×r.
матрица размерности
n×r.
Для системы (3.17) будем полагать, что она полностью управляемая по отношению к каждой из компонент U1(t), U2(t),…, Ur(t) вектора управления U(t). Такие системы называются нормальными. Для того чтобы линейная система с постоянными коэффициентами вида (3.19) была нормальной, необходимо и достаточно, чтобы все матрицы:
![]() ,
(j=1,2,…,r) (3.18)
,
(j=1,2,…,r) (3.18)
были не вырождены. Здесь Bj – j-тый столбец матрицы В.
Каждая нормальная матрица является полностью управляемой.
Функция Гамильтона Н для рассматриваемой задачи (3.16) будет представлена в виде:

или в векторной форме:
![]()
Сопряженная система уравнений для вспомогательных переменных будет
![]() (3.19)
(3.19)
Согласно принципа
максимума оптимальное управление должно
доставлять максимум функции Н.
Рассматривая выражение (3.18) мы видим,
что от управления U
зависит только второе слагаемое, поэтому
оптимальное управление должно
максимизировать слагаемое
![]() ,
имеем:
,
имеем:
![]()
Каждая составляющая
![]() вектора управления U
изменяется независимо от остальных.
Поэтому выражение (3.19) достигает
максимума, если
вектора управления U
изменяется независимо от остальных.
Поэтому выражение (3.19) достигает
максимума, если
![]() принимает
значения:
принимает
значения:
![]() ,
(к=1,2,…,r) (3.20)
,
(к=1,2,…,r) (3.20)
Таким образом,
оптимальное управление будет
кусочно-постоянной функцией времени
со значениями, принадлежащими вершинам
r-мерного
куба. Каждая составляющая
![]() есть
кусочно-постоянная функция, принимающая
значение ±1
в зависимости от знака
есть
кусочно-постоянная функция, принимающая
значение ±1
в зависимости от знака
![]() .
.
Если система
(3.16) нормальна, то соотношение (3.20)
однозначно определяют для каждого
ненулевого вектора
управляющие функции
![]() ,
причем эти функции имеют на отрезке
[0;tn-1]
конечное число переключений (рис. 3.10).
,
причем эти функции имеют на отрезке
[0;tn-1]
конечное число переключений (рис. 3.10).
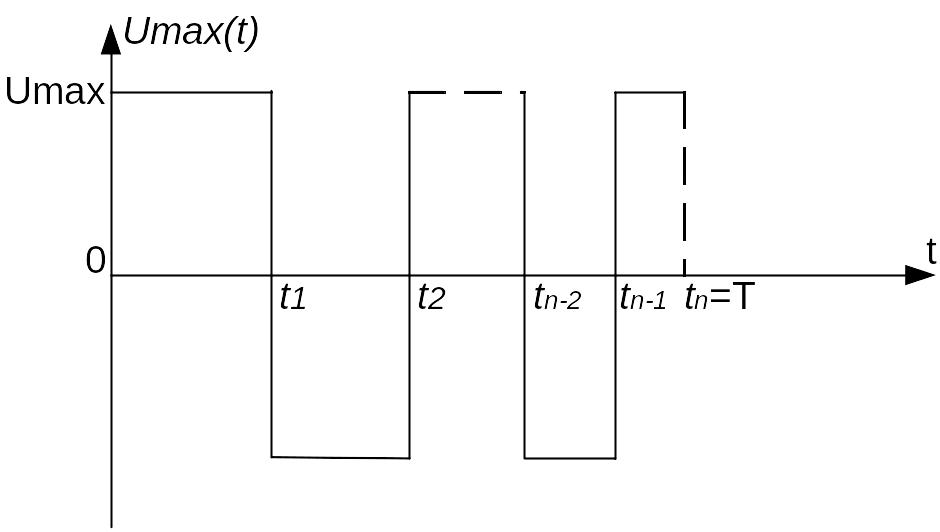
Рис. 3.10. Кусочно-постоянная функция управления Umax(t) для общего случая.
Выражение (3.20) является законом оптимального управления с кусочно-постоянной функцией, с числом переключения (n-1), где n – порядок объекта управления (3.16). В момент времени t=tn управляющее воздействие Umax(t) выключается. Следовательно, общий интервал управления включает в себя n – интервалов.
3.4.2. Теорема об n – интервалах
В общем случае число переключений оптимального управления конечно.
Моменты переключения и число их зависит от многих факторов:
от вектора состояния объекта в начальной x0 и конечной xk точках;
от параметров, характеризующих объект управления, т.е. от постоянного времени объекта и коэффициента передачи;
от вектора возмущающих воздействий (помех) и других факторов.
Мы будем рассматривать случаи, когда все характеристические числа матрицы А действительны, область управления представляет собой r-мерный куб и отсутствуют возмущающие воздействия.
Теорема 3.1. Если характеристические числа матрицы А – действительные числа и область управления U представляет собой r-мерный куб, то каждое из управлений кусочно-постоянно и имеет не более (n-1) переключений, где n- порядок системы.
Теорема об (n-1)- переключениях (об n – интервалах) справедлива только для линейных объектов с действительными корнями. Теорему еще называют теоремой о числе переключений.