

3. Принцип максимума л. С. Понтрягина
3.1. Неклассическое вариационное исчисление
Классическое вариационное исчисление формировалось и развивалось в рамках аналитической динамики, электродинамики, термодинамики и других научных направлений физики в период с 18-го века и до первой половины 20-го века. Все вариационные методы и принципы были созданы для решения проблем физики и естественно не были ориентированы для решения вариационных задач современной техники.
Еще раз напомним основные положения классического вариационного исчисления. Вариации функционалов считались непрерывными и линейными. Переменные, входящие в функционал или в уравнения объекта управления, ограничений не имели.
Однако во многих практических задачах эти условия не соблюдаются. Известно, что управляющие воздействия, которые входят в функционалы, могут быть кусочно-непрерывными, т.е. претерпевать разрывы первого рода. Например, релейные элементы вырабатывают кусочно-непрерывные сигналы управления. Поэтому нарушаются условия непрерывности. Кроме того, на координаты и управления практически всегда накладываются ограничения.
Преодолеть эти условия с помощью классического вариационного исчисления более простыми способами не удается.
Во второй половине 20-го века были сформулированы вариационные принципы управления: принцип максимума Л. С. Понтрягина и принцип оптимальности Р. Беллмана. В них заложены фундаментальные положения математической теории оптимального управления. С этого времени начинает формироваться неклассическое вариационное исчисление [8, 11]. В рамках развития принципа максимума и принципа относительности в 90-х годах прошлого века был создан принцип конечно-временных вариаций оптимального быстродействия и метод варьирования свободных функционалов [2].
Вариационные принципы управления, как и вариационные принципы механики, играют важную роль в понимании процессов в природе и технике. Они имеют большую эвристическую ценность, обладают глубоким идейным смыслом, дают пути к единообразной трактовке различных физических процессов и общие подходы к их исследованию. Вариационные методы решения ряда теоретических и прикладных задач оказываются наиболее эффективными в качественном и, в ряде случаев, в количественном отношениях.
3.2. Постановка основной задачи принципа максимума
Принцип максимума позволяет находить оптимальное управление при наличии ограничений и выполнять оптимальный синтез систем управления. Изложение принципа максимума встречает большие трудности. Его доказательство базируется на функциональном анализе и теории множеств. Поэтому основные положения принципа приводятся способом геометрического толкования.
Рассмотрим объект управления в векторной форме:
![]() (3.1)
(3.1)
или в скалярной форме:
![]() (3.2)
(3.2)
и критерий оптимальности:
 (3.3)
(3.3)
Кроме того, заданы
начальное состояние
![]() объекта
и конечное положение
объекта
и конечное положение
![]() .
.
Требуется так
выбрать вектор управления
![]() ,
чтобы объект был переведен из
в
за минимальное время.
,
чтобы объект был переведен из
в
за минимальное время.
В начальном варианте принцип максимума был сформулирован как принцип оптимальности по быстродействию. В дальнейшем этот принцип получил более широкую трактовку, включая минимизацию расхода энергии на управление.
В выражениях
(3.1÷3.3) обозначено:
![]()
вектор состояния объекта;
вектор управления;
вектор состояния объекта;
вектор управления;
![]()
координаты состояния объекта (например,
угол поворота вала двигателя, скорость
вращения вала и т.д.);
координаты состояния объекта (например,
угол поворота вала двигателя, скорость
вращения вала и т.д.);
![]()
скалярные величины управления
(управляющего воздействия);
скалярные величины управления
(управляющего воздействия);
![]() и
и
![]()
временные пределы интегрирования;
временные пределы интегрирования;
![]()
время перевода объекта из начального
состояния в конечное положение.
время перевода объекта из начального
состояния в конечное положение.
В принципе максимума вводится новая координата [5, 11]
 (3.4)
(3.4)
или
![]() (3.5)
(3.5)
Соответственно движение системы (3.2) с учетом (3.5) рассматривается в (n+1)-мерном пространстве.
![]() ,
,
![]()
или в векторной форме
![]() .
.
Причем в начальной
точке при
![]() ,
,
![]() ,
а в конечной точке при
,
а в конечной точке при
![]() ,
,
![]() .
.
Допустим, применено
управление
![]() .
Тогда
.
Тогда
![]() будет решением уравнения при известных
начальных условиях.
будет решением уравнения при известных
начальных условиях.
Представим это решение графически в трехмерном пространстве (рис. 3.1).
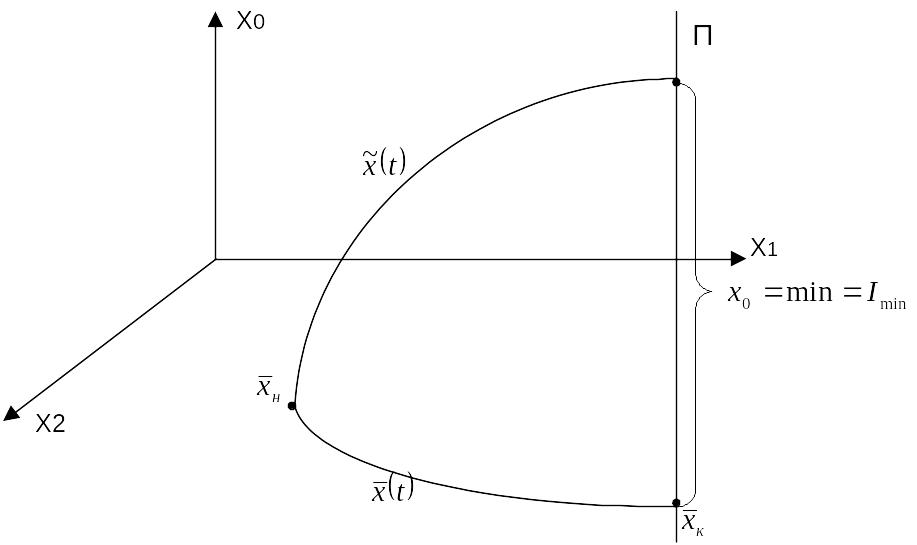
Рис.3.1 График движения траектории объекта с учетом x0.
Через точку
![]() проводят прямую П,
параллельную оси x0.
Тогда траектория
проводят прямую П,
параллельную оси x0.
Тогда траектория
![]()
это траектория в плоскости x1x2,
а
это траектория в плоскости x1x2,
а
![]() является кривой функционала с учетом
является кривой функционала с учетом
![]() .
То есть, мы рассматриваем движение
объекта в плоскости, а с учетом
в трехмерном пространстве.
.
То есть, мы рассматриваем движение
объекта в плоскости, а с учетом
в трехмерном пространстве.
Тогда основная задача отыскания оптимальных управлений может быть сформулирована следующим образом.
В фазовом пространстве X даны две точки и . Среди всех допустимых управлений U=U(t), переводящих объект из положения в положение , найти такое, для которого функционал (3.4) принимает наименьшее возможное значение.
Управление U(t), дающее решение поставленной задачи, называется оптимальным управлением, а соответствующая траектория х(t) – оптимальной траекторией.