

Магнитометры
Магнитометр - (от греч. magnetis - магнит и... метр), прибор для измерения характеристик магнитного поля и магнитных свойств веществ (магнитных материалов). В зависимости от определяемой величины различают приборы для измерения: напряжённости поля (эрстедметры), направления поля (инклинаторы и деклинаторы), градиента поля (градиентометры), магнитной индукции (тесламетры), магнитного потока (веберметры, или флюксметры), коэрцитивной силы (коэрцитиметры), магнитной проницаемости (мю-метры), магнитной восприимчивости (каппа-метры), магнитного момента.
В более узком смысле магнитометры - приборы для измерения напряжённости, направления и градиента магнитного поля. Шкалы магнитометров градуируются в единицах напряжённости магнитного поля СГС системы единиц (эрстед, мэ, мкэ, гамма = 105 э) и в единицах магнитной индукции СИ (тесла, мктл, нтл).
Самым главным параметром магнитометра является его чувствительность. При этом формализовать этот параметр, сделать его единым для всех магнитометров практически невозможно и не только потому, что магнитометры отличаются принципом действия, но и конструкцией преобразователей и функцией обработки сигнала. Для магнитометров принято чувствительность обозначать величиной магнитной индукции поля, которое способен зарегистрировать прибор. Обычно чувствительность измеряют в нанотеслах (нТл) 1нТл=(1Е-9)Т. Кроме чувствительности для определения качества прибора используют такой параметр, как разрешающая способность, который также измеряется в нанотеслах и определяет ту минимальную разницу индукции, которую возможно зарегистрировать прибором. Для того чтобы представить величину индукции магнитного поля, которое регистрируют современные магнитометры, достаточно вычислить величину магнитного поля, создаваемого проводником с током в 1 мА на расстоянии 0.1м.
Поле Земли составляет величину примерно 35000nT (35µT). Это усредненная величина – в различных точках земного шара она меняется в диапазоне 35000nT (35µT) – 60000nT (60µT). Таким образом, задача поиска ферромагнитных предметов состоит в том, чтобы на фоне природного поля Земли обнаружить приращение поля, обусловленное искажениями от ферромагнитных предметов. * Bmax = 70µT Hmax=55.7A/m Bmin = 20µT Hmin=15.9A/m
Существует несколько физических принципов и основанных на них типов магнитометрических приборов, позволяющих фиксировать минимальные изменения магнитного поля Земли или искажения, вносимые ферромагнитными объектами. Современные магнитометры обладают чувствительностью от 0.01nT до 1nT, в зависимости от принципа действия и класса решаемых задач.
Разновидности магнитометров.
Феррозондовый.
Магнитоиндуктивные.
На эффекте Холла.
Магниторезисторные.
Феррозонд
Феррозондовый преобразователь магнитного поля, или феррозонд, предназначен для измерения и индикации постоянных и медленно меняющихся магнитных полей и их градиентов. Действие феррозонда основано на изменении магнитного состояния ферромагнетика под воздействием двух магнитных полей разных частот. На рис. 14 схематически показаны некоторые варианты конструкций феррозондов.

Рис. 14 Конструкции ферозондов.
В простейшем варианте феррозонд состоит из ферромагнитного сердечника находящихся на нем двух катушек:
катушки возбуждения, питаемой переменным током
и измерительной (сигнальной) катушки.
Сердечник феррозонда выполняется из материалов с высокой магнитной проницаемостью. На катушку возбуждения от специального генератора подается переменное напряжение с частотой от 1 до 300 кГц (в зависимости от уровня параметров и назначения прибора). В отсутствие измеряемого магнитного поля сердечник под действием переменного магнитного поля Н, создаваемого током в катушке возбуждения, перемагничивается по симметричному циклу.Изменение магнитного поля, вызванное перемагничиванием сердечника по симметричной кривой, индуцирует в сигнальной катушке ЭДС, изменяющуюся по гармоническому закону. Если одновременно на сердечник действует измеряемое постоянное или медленно меняющееся магнитное поле Но, то кривая перемагничивания меняет свои размеры и форму и становится несимметричной. При этом изменяется величина и гармонический состав ЭДС в сигнальной катушке. В частности, появляются четные гармонические составляющие ЭДС, величина которых пропорциональна напряженности измеряемого поля и которые отсутствуют при симметричном цикле перемагничивания.
Феррозонды подразделяются на:
стержневые одноэлементные (рис. 14, а)
дифференциальные с разомкнутым сердечником (рис.14, б)
дифференциальные с замкнутым (кольцевым) сердечником (рис.14, в).
Магнитоиндуктивные датчики.
Фирмой Precision Navigation Inc. (США) разработан усовершенствованный вариант феррорезонансного датчика, который получил наименование магнитоиндуктивного датчика - Magneto-Inductive (MI) sensors. Датчик представляет собой микроминиатюрную катушку индуктивности с ферромагнитным сердечником. Катушка содержит всего одну обмотку и регистрирует магнитное поле в направлении только одной из осей.
 Рис.
15. Магнитоиндуктивный
датчик:
а
- упрощенная
схема
включения,
б
- выходная
характеристика
Рис.
15. Магнитоиндуктивный
датчик:
а
- упрощенная
схема
включения,
б
- выходная
характеристика
На рис. приведены упрощенная схема включения MI и выходная характеристика датчика. Схема представляет собой релаксационный LR-генератор, в котором MI датчик выполняет роль основного элемента. Изменение напряженности воздействующего магнитного поля приводит к изменению частоты генератора. Датчики предназначены для использования в составе электронных компасов. В этом случае выходной сигнал генератора обрабатывается ИС микропроцессора.
Датчики магнитного поля на основе эффекта Холла
Датчики магнитного поля на основе эффекта Холла обладают хорошей
линейностью выходного сигнала и высокой чувствительностью к магнитным полям,
приложенным перпендикулярно, вне зависимости от их плоскости.
Конструктивно датчики Холла (рис. 1) состоят из чувствительного элемента
Холла, стабилизатора питания, схемы усиления сигнала и выходного каскада [1].
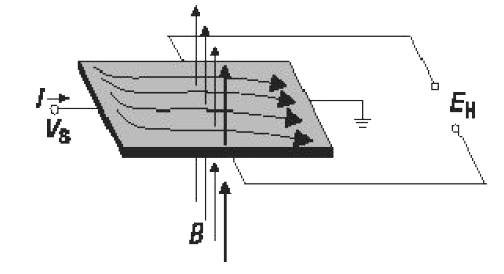
Рис. 16. Принцип действия чувствительного элемента Холла
Магниторезистивные датчики
Магниторезистивные датчики отличаются высокой чувствительностью и
позволяют измерять самые малые изменения магнитного поля. Они применяются в
магнитометрии для решения различных задач: определения угла поворота, положения
объекта относительно магнитного поля земли, измерения частоты вращения зубчатых
колес и др.
Принцип работы магниторезистивных датчиков (рис. 3) основан на изменении
направления намагниченности внутренних доменов слоя пермаллоя (NiFe) под
воздействием внешнего магнитного поля. В зависимости от угла между направлением
тока и вектором намагниченности изменяется сопротивление пермаллоевой пленки.
Под углом 90° оно минимально, угол 0° соответствует максимальному значению
сопротивления.

Рис. 17. Изменение свойств пермаллоя во внешнем магнитном поле
Конструкция магниторезистивных датчиков Honeywell состоит из четырех
пермаллоевых слоев, которые организованы в мостовую схему. Кроме того, на плату
датчика добавлены две катушки: SET/RESET и OFFSET. Катушка SET/RESET создает
легкую ось, которая необходима для поддержания высокой чувствительности датчика,
катушка OFFSET предназначена для компенсации воздействия паразитных магнитных
полей (созданных, например, каким-либо ферромагнитным объектом или
металлическими предметами) [1].
Датчики позволяют измерять самые слабые магнитные поля (от 30 мкГаусс) с
последующим их преобразованием в выходное напряжение. В конструкции датчика
могут быть объединены несколько мостовых схем, образуя, таким образом, двух- и
трехосевые сенсоры.
Таблица 2. Основные параметры наиболее распространенных преобразователей магнитного поля, используемых для регистрации магнитного поля Земли.
№ п/п |
Тип преобразователя магнитного поля |
Минима-льное разрешение мкТл |
Число одновре-менно регистри-рующих составляющих МП |
Динами-ческий диапазон мкТл |
Потребля-емая мощность млВт |
Достоинства, недостатки, особенности применения |
1 |
Элемент Холла высокой чувствитель-ности |
1-10 |
1-3 |
±100 |
10-50 |
Компактность, высокая надежность, широкий динамический диапазон. Удовлетворительная магнитная чувствительность. Малая постоянная времени. Хорошая ориентационная характеристика. Хорошее сопряжение с электроникой. Широкий диапазон рабочих температур: от -260 до +150 С. Высокая стоимость |
2 |
Специализированный тонкопленочный магниторезистор |
0,4-0,85 |
1-2 |
±(0,2-1) |
30-90 |
Компактность и высокая надежность. Высокая магнитная чувствительность. Интегральная технология, совмещенная с компенсационной и модулирующей катушками. Малая постоянная времени. Хорошая ориентационная характеристика. Хорошее сопряжение с электроникой. Диапазон рабочих температур: от -40 до +85 С. Ограниченный динамический диапазон. Сравнительно низкая стоимость |
3 |
Магнитоиндукционный датчик |
0,01-0,02 |
1 |
±(1-200) |
1-5 |
Компактность и высокая надежность. Высокая магнитная чувствительность. Малая постоянная времени. Хорошее сопряжение с электроникой. Хорошая ориентационная характеристика. Диапазон рабочих температур: от -20 до +70 С. Ограниченный динамический диапазон. Низкая стоимость |
4 |
Ферозонд |
0,0001-0,01 |
1 |
±0,1 |
5-50 |
Очень высокая магнитная чувствительность. Удовлетворительная ориентационная характеристика. Большие размеры. Ограниченный динамический диапазон. Невысокая механическая прочность, невозможность работы в условиях вибраций и тряски. Значительная инерционность. Сложность сопряжения с электроникой. Диапазон рабочих температур: от -10 до +70 С. Значительная трудоемкость и высокая стоимость |