

Лекция №5. Магнитомодуляционные измерительные преобразователи
Магнитомодуляционными называются преобразователи, действие которых основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянном и переменном полях. Модуляция магнитным потоком возможна за счет нелинейных свойств магнитной цепи.
Магнитомодуляционные преобразователи (ММП) широко используются в счетно-решающей технике в качестве логических элементов и запоминающих устройств. В измерительной технике ММП применяются для измерения напряженности постоянного магнитного поля (феррозонды), для преобразования постоянного тока в переменный с уменьшением абсолютного значения тока (измерительные трансформаторы постоянного тока), для преобразования постоянного тока в переменный с увеличением абсолютного значения тока (магнитные усилители), для измерения перемещения объекта, с которым связывается подвижная часть преобразователя, несущая постоянный магнит (магнитомодуляционные преобразователи перемещения).
На рис. 5.1, а представлена упрощенно в виде ломаной линии 1 основная кривая намагничивания В = f (Н) ферромагнитного материала; там же показана кривая 2 магнитной проницаемости μ (Н) = B/H и кривая 3 дифференциальной магнитной проницаемости μд (Н) = dB/dH.
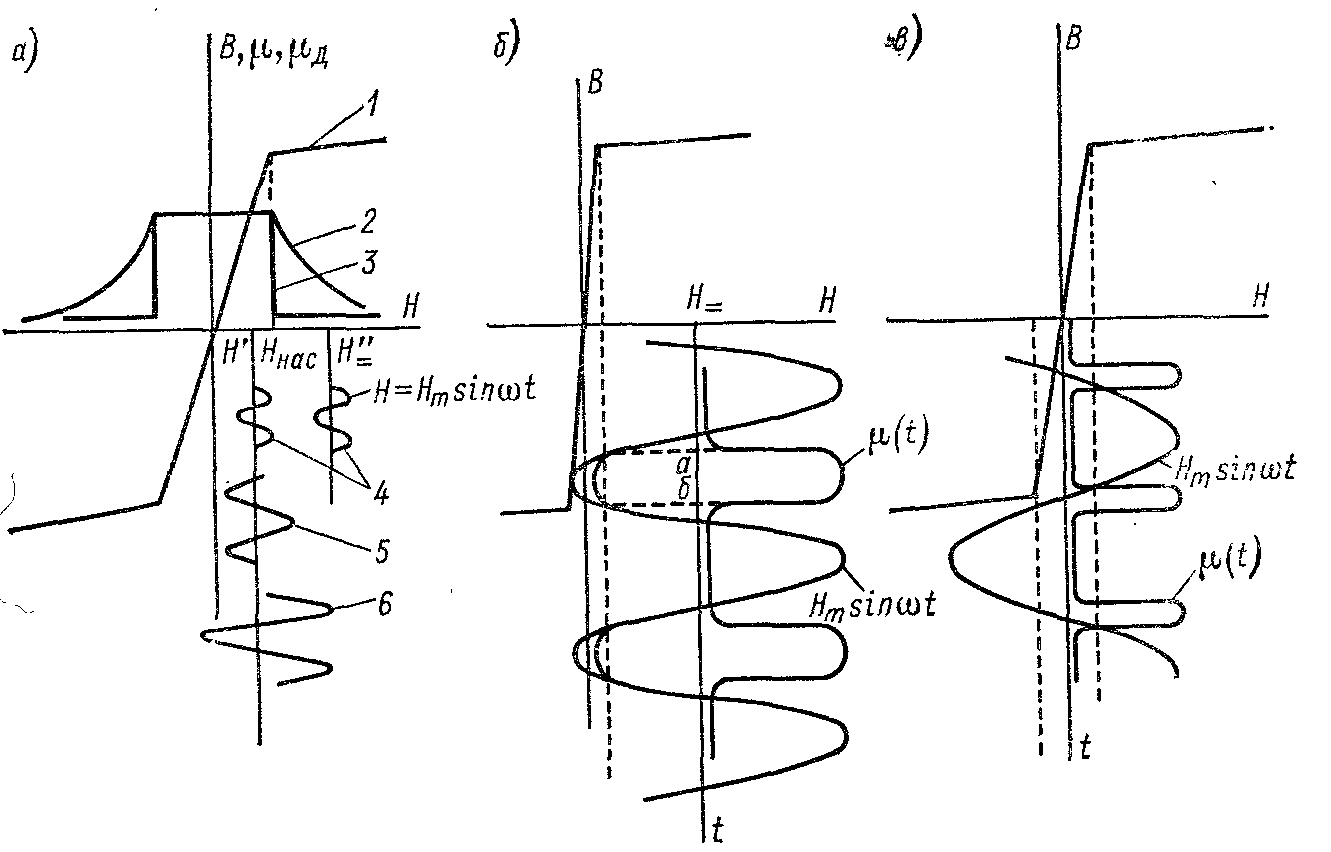
Рис. 5.1
На этом же рисунке даны кривые 4, 5, и 6 напряженностей переменного магнитного поля Н= Нт sin ωt, наложенного на постоянное с напряженностью H_. При этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля H_ может быть как меньше, так и больше напряженности насыщения Hнас.
Для магнитной цепи ММП характерны три различных режима работы: а) Hm~ и H_ меньше Hнас; б) H_ ≥ Hнас, Hm~ ≥ H_; в) Hm~ > Hнас, H_ < Hm~. В первом режиме, показанном на рис. 5.1, а, магнитное сопротивление переменному потоку зависит от величины H_ и при Hm~< H_ может быть определено дифференциальной магнитной проницаемостью μд. При сравнимых величинах Hm~ и H_ для анализа работы магнитной цепи используются характеристики двойного намагничивания Вт = f (Hm, В=), приводимые ниже на рис. 5.2.
Во втором режиме (рис. 5.1, б) модулирующим является постоянное поле, сердечник находится в режиме насыщения и выходит из него лишь в те полупериоды переменного напряжения, когда напряженность H~, направлена навстречу Н_ и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения. Таким образом, для переменного магнитного поля сердечник работает в ключевом режиме, включаясь на отрезке времени aб, когда Н_ + H~ ≈ 0. Всю остальную часть периода магнитная проницаемость сердечника, показанная на рис. 5.1, б кривой μ (t), мала; обмотка, по которой проходит переменный ток, имеет малую индуктивность L = w2/ZM = μw2S/lM, и лишь на участке аб магнитная проницаемость и индуктивность резко возрастают.
В третьем режиме модулирующим является переменное поле. Для постоянного магнитного поля сердечник работает в ключевом режиме,
включаясь дважды за каждый период, когда напряженность переменного поля находится в диапазоне, ограниченном штриховыми прямыми (рис. 5.1, в). Действительно, в ту часть периода, когда H~ < Hнас, магнитная проницаемость сердечника велика и он является для постоянного потока нормальным ферромагнетиком с магнитной проницаемостью μ=(103÷105) μ 0, а в ту часть периода, когда H~ > Hнас, магнитная проницаемость сердечника падает до значения ) μ = (10÷1) μ0 и он как бы отсутствует для постоянного магнитного поля. Кривая μ = f (t) также показана на рис. 5.1, в.
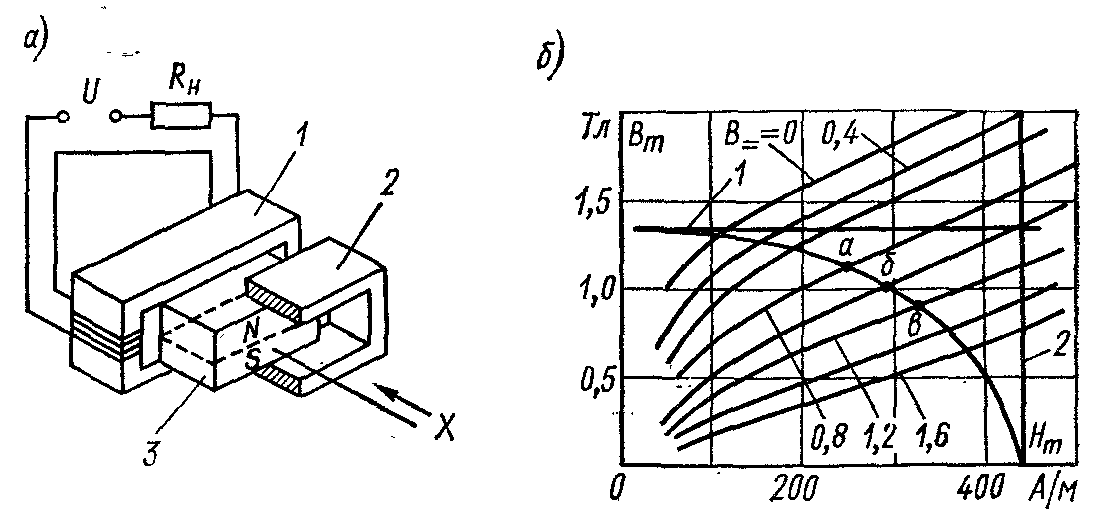
Рис. 5.2
Магнитомодуляционные преобразователи перемещения. Принцип действия преобразователя показан на рис. 5.2, а. Между двумя сердечниками 1и 2 из листовой стали расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и, следовательно, в каждом из сердечников действуют одинаковые индукции постоянного подмагничивания, равные В = О,5σФ_/(2Sсерд), где Ф_ — поток магнита; σ — коэффициент рассеяния и Sсерд — площадь сечения сердечника. На сердечник 1 намотана обмотка с числом витков w, а сердечник 2 служит магнитным шунтом. Обмотка через резистор подключена к источнику переменного тока 50 Гц. При перемещении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает. Магнитное сопротивление переменному потоку возрастает, индуктивность обмотки падает, ток й падение напряжения на резисторе Rн увеличиваются. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной — падение напряжения на резисторе Rн. Характеристики двойного подмагничивания для листовой стали приведены на рис. 5.2,б.
В том случае, если сердечник 1 находится по переменному потоку в режиме заданной индукции, т. е. R = RH + Rw = 0 (Rw — активное сопротивление обмотки) и все напряжение питания уравновешивается противо-ЭДС обмотки, напряженность в материале и, следовательно, определяющий ее ток характеризуются при изменении В_ точками пересечения прямой 1 с семейством приведенных характеристик. Если сердечник 1 находится в режиме заданной напряженности, т. е. RH >>ωL и ток через обмотку не зависит от изменения ее противо-ЭДС, то переменная индукция в сердечнике и связанная с ней противо-ЭДС определяются точками пересечения прямой 2 с семейством характеристик. В реальном случае нагрузочная кривая описывается уравнением эллипса
![]() (5.1)
(5.1)
где B’m = √2U/(ωwSсерд); H'm = √2 Iw/lсерд = √2 Uw/( lсерд R); B'm — амплитудное значение индукции в режиме заданного напряжения; H'm — амплитудное значение напряженности в режиме заданного тока; U — действующее напряжение питания; w — число витков обмотки; ω— частота; Sсерд и lсерд — площадь поперечного сечения сердечника и длина магнитной линии по сердечнику.
Измерительные трансформаторы постоянного тока (ИТПТ) применяются для измерения больших постоянных токов, а также токов и напряжений в высоковольтных цепях постоянного тока.
ИТПТ (рис. 5.3, а) состоит из двух одинаковых замкнутых ферромагнитных сердечников из магнитомягкого материала с прямоугольной кривой намагничивания, которые имеют общую первичную обмотку с числом витков w1 = 1, представляющую собой шину, по которой проходит измеряемый постоянный ток, и отдельные вторичные обмотки с числом витков w2, равномерно намотанные на свои сердечники. Вторичные обмотки включаются последовательно-встречно к вспомогательному источнику переменного тока, а протекающий по ним ток i2 обычно выпрямляется и измеряется магнитоэлектрическим амперметром.
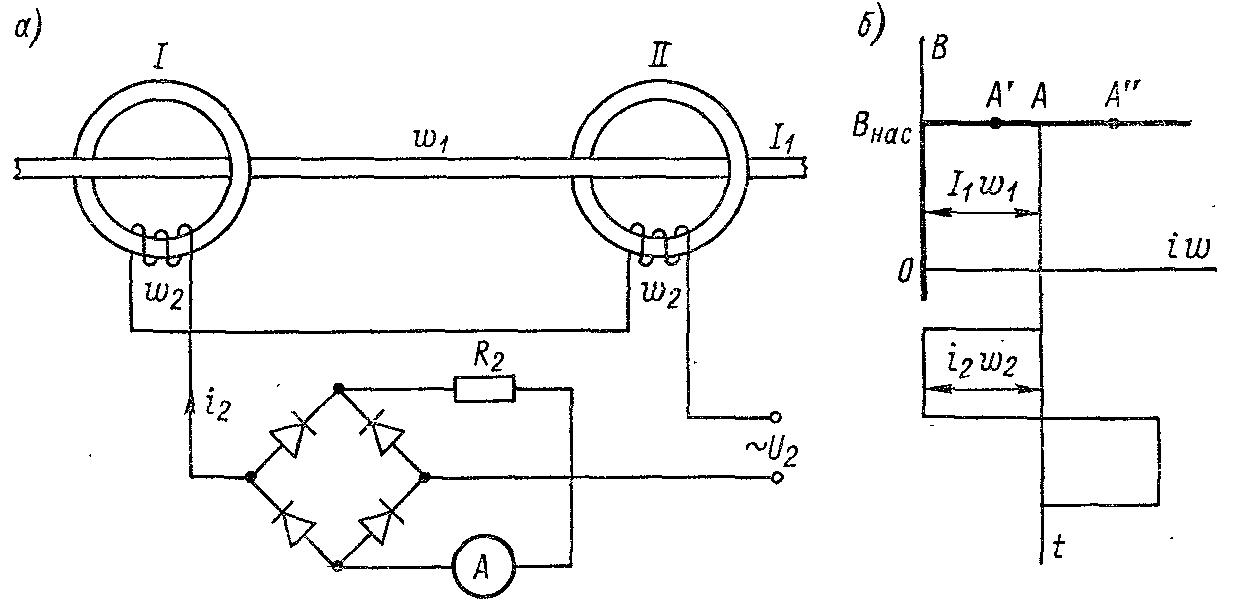
Рис. 5.3
Магнитная цепь ИТПТ работает в режиме насыщения по постоянному магнитному потоку и выходит из этого режима, только когда
напряженность встречно направленного переменного магнитного поля компенсирует напряженность постоянного магнитного поля (рис.5.1,в).
На рис. 5.3, б изображена идеализированная прямоугольная кривая намагничивания сердечников и показаны МДС, действующие в сердечниках. Под действием МДС I1w1 оба сердечника насыщаются. Току I1 соответствует начальная рабочая точка А на участке насыщения кривой намагничивания. Если ток I1 увеличивается, точка А смещается вправо (А"); при уменьшении I1 точка А смещается влево (A'). Ось времени для переменной МДС i2w2 совмещена с вертикальной линией, проходящей через точку А.
Рассмотрим полупериод тока, когда в сердечнике I первичная I1w1 и вторичная i2w2 МДС вычитаются, а в сердечнике II — суммируются. При суммировании МДС индукция в сердечнике остается неизменной, равной индукции насыщения Внас. При вычитании МДС индукция остается неизменной, лишь пока i2w2 < I1w1. При равенстве МДС происходит изменение индукции и в обмотке сердечника I индуктируется ЭДС, встречная приложенному напряжению и уравновешивающая его. Таким образом, во вторичной обмотке ток не может превысить значения i2 = I1w1/w2. Если допустить, что активные сопротивления полуобмоток, надетых на сердечники I и II, равны нулю, то ток независимо от значения приложенного напряжения мгновенно возрастает до значения i2 = l1w1/w2, при котором «включается» противо-ЭДС, и кривая вторичного тока, как и показано на рис. 5.3, б, имеет прямоугольную форму. В следующий полупериод вследствие встречного включения вторичных обмоток вычитание МДС происходит в сердечнике II, в обмотке которого индуктируется ЭДС, уравновешивающая приложенное напряжение.
Как видно из принципа действия ИТПТ, никакой трансформации энергии не происходит, а имеет место уравновешивание МДС. Среднее значение выпрямленного тока I2ср, протекающего через амперметр, определяется из равенства МДС: I2ср = I1w1/w2.
Форма вторичного тока не зависит от формы и частоты вспомогательного напряжения, а также от его значения, если оно выбрано таким образом, чтобы изменение магнитной индукции ΔВ в сердечниках было меньше двойного значения индукции насыщения Внас. Последнее эквивалентно условию Вт < Внас, где Вт — амплитуда переменной индукции в сердечниках при I1 = 0, определяемая из выражения Вт = √2 U2/(4πfw2Scерд), где Scepд, — площадь сечения сердечника; U2 — действующее напряжение вспомогательного источника.
Если ΔВ > 2Bнас, может произойти повторное насыщение работающего сердечника в нижней части цикла перемагничивания и оба сердечника окажутся в состоянии насыщения. При этом вторичный ток перестает зависеть от измеряемого первичного тока и ограничивается только сопротивлением вторичных обмоток. Обычно U2 выбирают из условия Вт = (0,9 ÷0,75) Внас.
Погрешности ИТПТ с последовательным соединением вторичных обмоток главным образом обусловлены отличием реальной петли перемагничивания сердечников от идеальной прямоугольной петли и в меньшей степени конечным значением сопротивления вторичной цепи ИТПТ.
Для работы в низковольтных цепях до 1000 В в СССР выпускаются ИТПТ с номинальным первичным током 5; 7,5; 10; 15; 25 и 35 кА, с основной погрешностью 0,5%. Номинальный вторичный ток 5 А. Для измерения постоянных токов в высоковольтных цепях выпускаются ИТПТ с номинальным первичным током 1; 2 и 4 кА. Известны также ИТПТ с пределами измерений до 100 кА и разъемным магнитопроводом, что дает возможность производить их монтаж без разрыва цепи измеряемого тока.
Феррозонды. Феррозондами называют чувствительные к воздействию внешних полей устройства, содержащие ферромагнитные сердечники и охватывающие их обмотки, в одну из которых подают переменный ток, а с другой снимают ЭДС, по которой и судят об измеряемом значении поля.
Феррозонды относятся к индукционным преобразователям активного типа. Происходящие в них процессы преобразования всегда связаны с существованием, по крайней мере, двух магнитных полей: измеряемого (обычно постоянного или медленно изменяющегося) поля Нх и вспомогательного переменного поля Н~, создаваемого переменным током. Взаимодействие этих полей в объеме двух ферромагнитных сердечников в конечном счете и приводит к появлению в другой (измерительной) обмотке ЭДС, несущей информацию об измеряемом поле.
На рис. 5.4 изображена схема дифференциального феррозонда, состоящего из двух ферромагнитных источников 1 и 2 из железоникелевого сплава, на каждом из которых имеется модулирующая обмотка с числом витков w1. Обмотки питаются от источника переменного тока. Обмотки включены последовательно, но встречно, так что создаваемые или переменные магнитные потоки сдвинуты на 1800. Оба сердечника с модулирующими обмотками охватывает измерительная обмотка с числом витков w2. При идентичности сердечников вследствие встречного включения модулирующих обмоток в измерительной обмотке не будет индуктироваться ЭДС. Напряженность переменного магнитного поля H1m = (3÷5) Hнас. Таким образом, материал сердечников работает в режиме, соответствующем рис. 5.1, в. Магнитная проницаемость обоих сердечников изменяется одинаково и, как видно из рис. 5.1, в, в два раза за период возрастает до максимального значения.
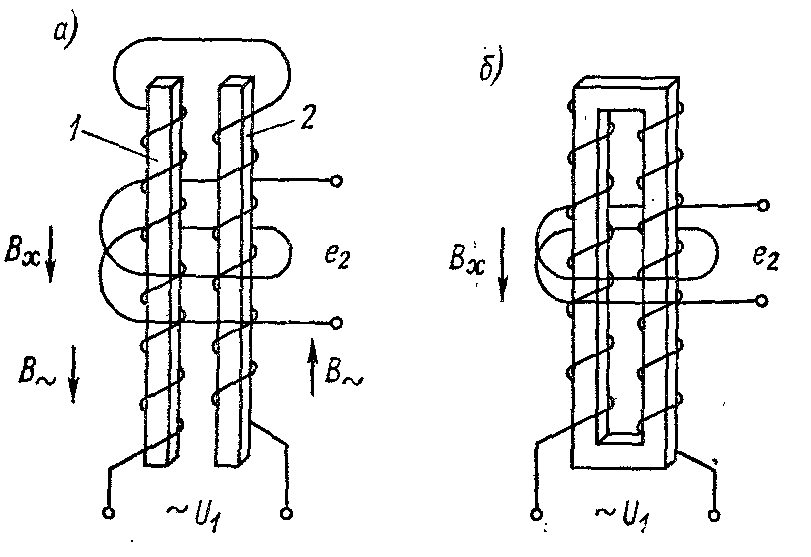
Рис. 5.4
Если феррозонд поместить в постоянное магнитное поле с индукцией Bx, то условно можно считать, что в это поле дважды за период вносится концентратор поля и возникающие импульсы индукции наводят ЭДС в измерительной обмотке.
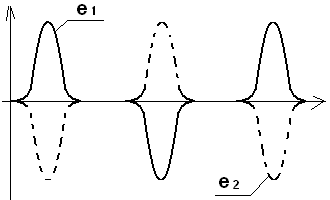
На рис. 5.5 показаны кривые, поясняющие работу четногармонического феррозонда. μ*д периодически изменяется от максимального (при H1m<Hнас) до минимального (при H1m>Hнас) значения. Проницаемость сердечников меняется с удвоенной частотой, в результате чего в измерительной обмотке возникает ЭДС удвоенной частоты, пропорциональная индукции Bx и скорости изменения μ*д. При изменении полярности Bx выходная ЭДС изменяет фазу на 1800.
Обычно в качестве информативного параметра используется амплитуда второй гармоники выходной ЭДС.
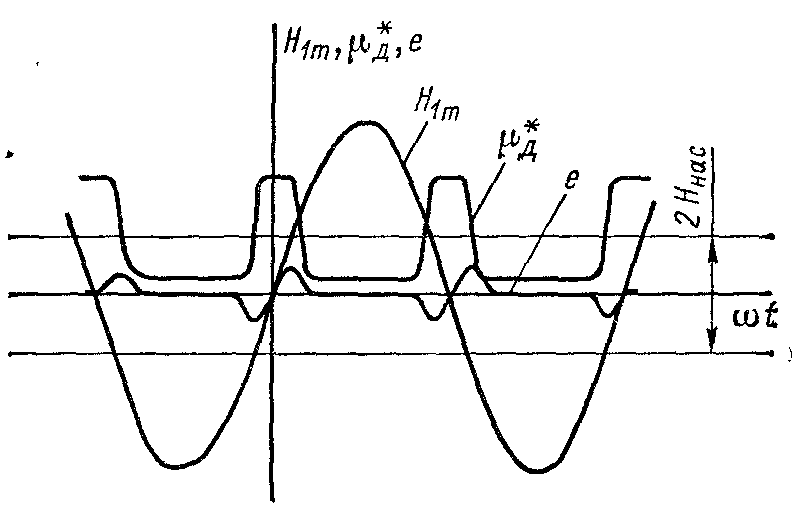
Рис. 5.5
Наиболее широкое применение получили феррозонды с продольным возбуждением с разомкнутой (рис. 5.4,а) или замкнутой (рис. 5.4,б) магнитной цепью.
ЭДС, наводимую в измерительной обмотке, можно найти на основе закона электромагнитной индукции:
где W2 – число витков измерительной обмотки;
Ф = B*S – магнитный поток в сердечниках;
S – суммарная площадь поперечного сечения сердечников феррозонда.
Два частных случаев:
α = 0;
 :
с взаимно параллельными полями
:
с взаимно параллельными полямиα = 900;
 :
с взаимно перпендикулярными полями
:
с взаимно перпендикулярными полями
1. Будем считать зависимость В (Н) линейной, т.е. В = аН.
Тогда

 - после аппроксимации
- после аппроксимации




Отсюда видно, что нелинейность зависимости B(H) является принципиальным фактором, ответственным за появление ЭДС.
2. Рассмотрим теперь работу феррозонда с взаимно перпендикулярными полями
После аппроксимации получим:



Н~ может быть представлено в виде двух полей от независимых источников.
 ,
,
где Н2 – напряженность постоянного (неизмеренного) поля

e ~ ω, следовательно, можно осуществить модуляцию.
Режим 1: Hm<<H2

Режим 2: Hm>>H2 и H2=0

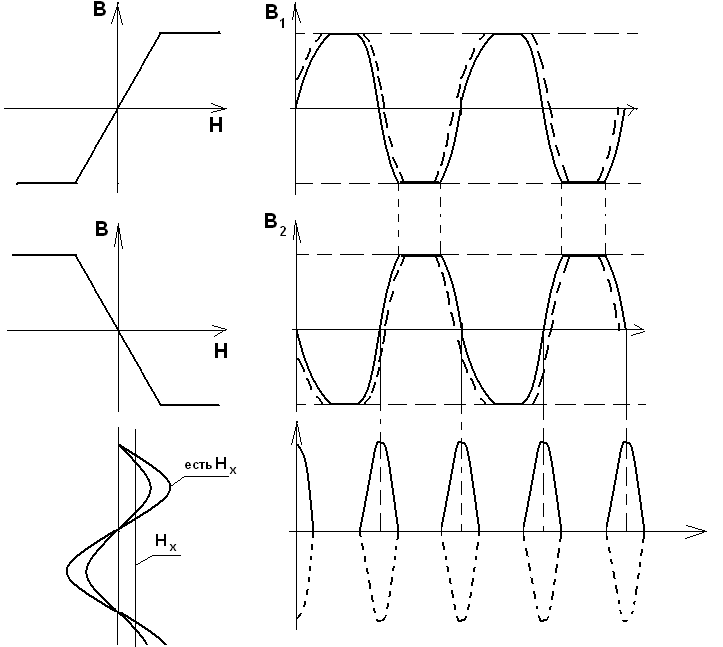
Рис. 5.6
На следующем рисунке представлен графический дифференциал от первого сердечника
HX ≠0
Рис. 5.7
Структурные схемы магнитометров с использованием феррозондов
Магнитометры постоянных полей(«схема второй гармоники»)
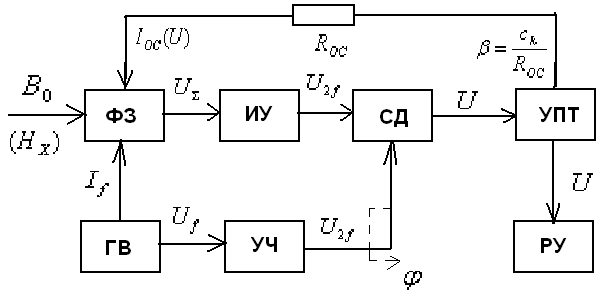
Рис. 5.8
В схеме реализован известный прием модуляции, усиления и демодуляции слабых постоянных или медленно изменяющихся (инфранизкочастотных) сигналов. Роль модулятора выполняет феррозонд, вырабатывающий модулированный сигнал на несущей частоте 2f . Этот сигнал и подлежит усилению. С целью улучшения отношения сигнала 2f от нечетных гармоник помехи (напряжение небаланса) используют избирательное усиление. Роль демодулятора выполняет синхронный детектор СД (его работа синхронизована с работой модулятора ФЗ). Детектор и модулятор питаются от одного генератора возбуждения ГВ.
Дальнейшее усиление демодулированного сигнала осуществляется с помощью усилителей постоянного тока УПТ. При этом сигнал доводится до такого уровня, при котором осуществляется надежная регистрация выходного напряжения или тока с помощью регистрирующего устройства РУ.
С целью стабилизации полного коэффициента усиления канал магнитометра охватывается отрицательной обратной связью ОС «по полю», которую реализуют за счет подачи части выходного тока канала через резистор обратной связи ROC в компенсационную обмотку феррозонда ФЗ.
УЧ – умножитель частоты.
Ск – постоянная катушки компенсации.
Синхронный детектор СД в отличие от обычных детекторов является не только демодулятором, но и устройством фазовой и частотной селекции сигнала.
Можно отфильтровать не только нечетную гармонику, но и четную, если они квадратичные (сдвинуты на 900 от опорного напряжения). Для этого ставят фазовращатель.
Магнитометры переменных полей
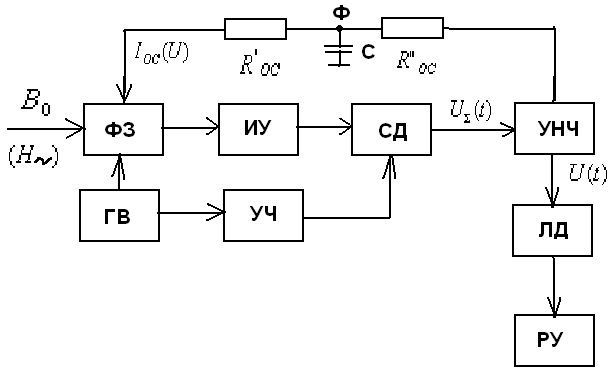
Рис. 5.9
Отличие состоит в том, что теперь часть канала охвачена частотно-зависимой отрицательной обратной связью «по полу», а взамен УПТ включен избирательный усилитель низкой частоты УНЧ и линейный детектор ЛД.
Градиентометр (дифференциальный магнитометр)
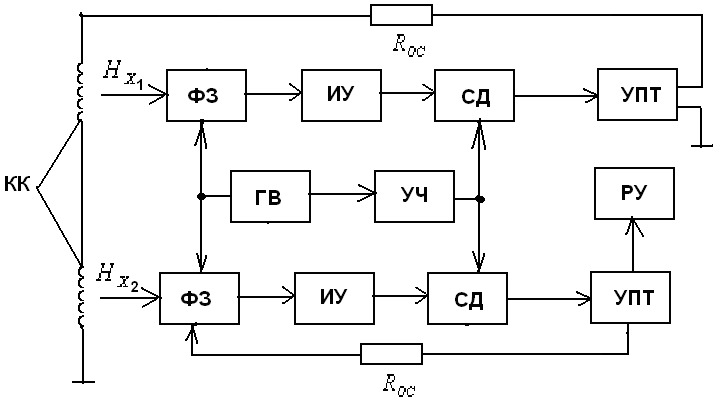
Рис. 5.10
Используя два феррозонда, можно создать прибор для измерения разности индукций магнитного поля в двух точках пространства.
 или
или

Если расстояние между магнитными центрами феррозондов (база) сравнительно велико, то прибор называют дифференциальным магнитометром, если же база мала – магнитным градиентометром.
Для градиентометра
 или
или

где l – длина,
i и j – индексы направлений вдоль соответствующих осей координат.
Если величина Н велика, то измеряют просто разницу в 2-х точках пространства.