

Лекция № 2. Классификация электромагнитных измерительных преобразователей Преобразование параметров магнитного поля в электрический сигнал
В соответствии с принципом действия и исходными уравнениями электромагнитные преобразователи могут быть подразделены на следующие большие группы:
1. Преобразователи масштаба тока и напряжения (измерительные трансформаторы тока и напряжения и индуктивные делители напряжения).
2. Электромеханические преобразователи электрического тока в электромагнитную силу. Эти преобразователи используются в электромеханических приборах: амперметрах, вольтметрах, ваттметрах, частотометрах, фазометрах и в качестве обратных преобразователей датчиков уравновешивающего преобразования.
3.Индукционные преобразователи, основанные на законе электромагнитной индукции е = —dΨ/dt и используемые для измерения индукции постоянного и переменного магнитных полей, а также скорости.
4. Индуктивные и взаимоиндуктивные преобразователи для измерения неэлектрических величин, влияющих на изменение положения отдельных частей преобразователя.
5. Магнитоупругие преобразователи, в которых используется зависимость магнитной проницаемости ферромагнитных материалов от механических напряжений в материале. Применяются для измерения сил и давлений.
6. Магнитомодуляционные преобразователи, в которых используются нелинейные свойства магнитной цепи.
7. Преобразователи, использующие эффект Баркгаузена. Выходной величиной этих преобразователей является ЭДС магнитного шума.
Принцип действия и область применения электромагнитных преобразователей
Электромагнитный (ЭМ) преобразователь представляет собой один или несколько контуров, находящихся в магнитном поле, которое может быть создано как токами, протекающими по контурам, так и внешним источником.
Одноконтурный ЭМ преобразователь характеризуется током i через контур, потокосцеплением Ψ = Li, противо-ЭДС е = - dΨ/dt, энергией электромагнитного поля WM = Ψi/2 = Li2/2, индуктивностью L. Выходной величиной одноконтурного ЭМ преобразователя может быть: индуктивность L, электромагнитная сила Fэм и индуктируемая в контуре ЭДС еинд.
Индуктивность L = ω2 (Re Zм/z2м), где ω — число витков контура; Re ZM и zM — действительная часть и модуль полного магнитного сопротивления
ZM = ∫ dlм/(μSм) пути 1М, по которому замыкается поток; SM — поперечное сечение потока; μ — магнитная проницаемость среды, по которой замыкается поток. Индуктивность преобразователя увеличивается, если в магнитное поле контура вводится ферромагнитный материал.
ЭМ преобразователь с ферромагнитным сердечником показан на рис. 2.1, а, изменение его индуктивности происходит при изменении положения сердечника. Таким образом, входной величиной преобразователя является перемещение. Такой преобразователь называется индуктивным. Изменение индуктивности происходит также при изменении магнитной проницаемости сердечника. Магнитная проницаемость ферромагнитных материалов зависит от значения напряженности магнитного поля в материале. Соответственно индуктивность L зависит от тока, текущего через преобразователь и создающего собственное магнитное поле, и от параметров внешнего магнитного поля. Преобразователи, принцип действия которых основан на использовании зависимости L = f(B) называются магнитомодулщионными. При деформации ферромагнетиков также изменяется их магнитная проницаемость. Этот эффект, называемый магнитоупругим, используется в преобразователях для измерения сил и давлений. Принцип действия магнитоупругого преобразователя показан на рис. 2.1, б.
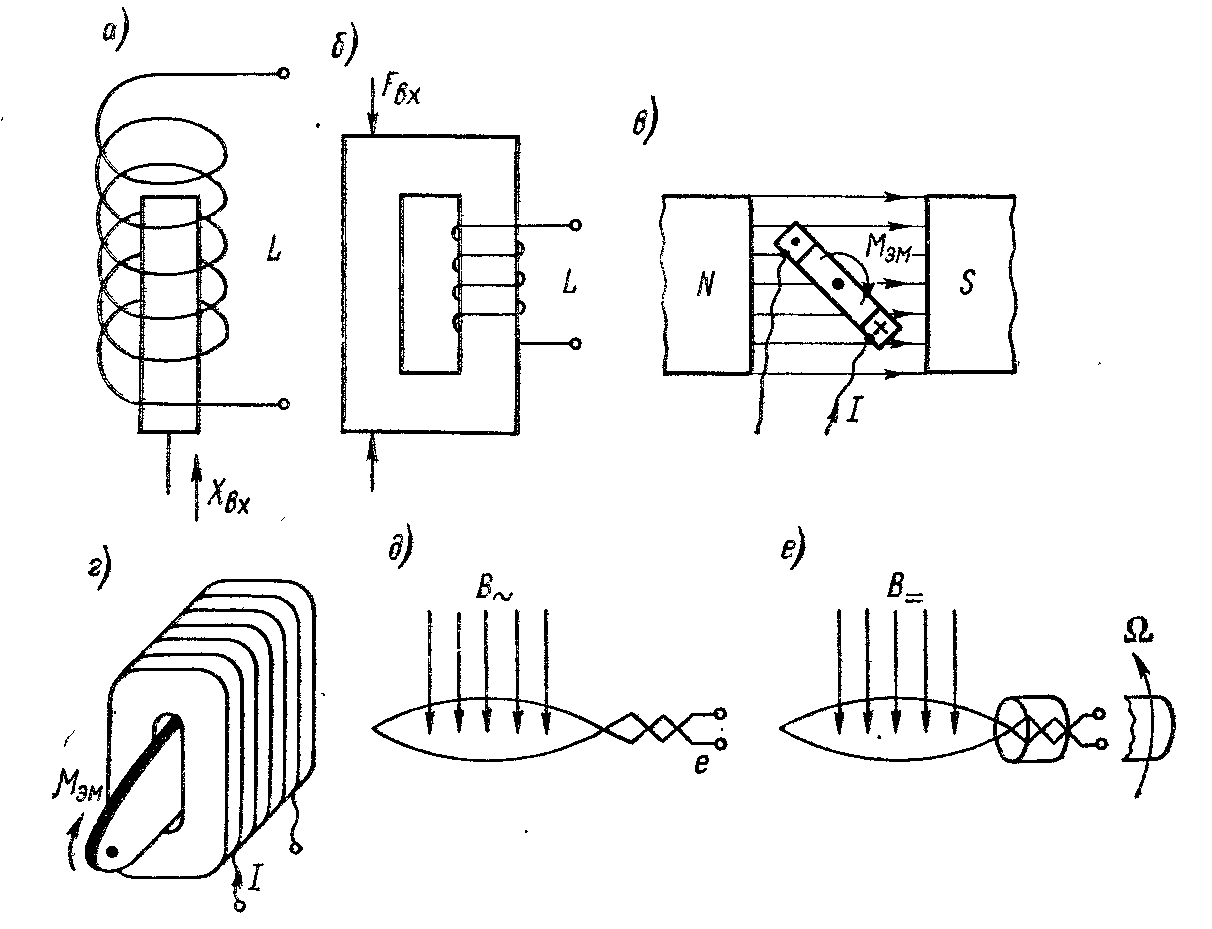
Рис.2.1
Электромагнитная сила действует на контур с током, находящийся во внешнем магнитном поле, стремясь сместить или развернуть его так, чтобы суммарная индукция магнитного поля была максимальной. Эта сила пропорциональна току i и индукции В. Если ток через контур поддерживать постоянным i = const, то по значению электромагнитной силы можно определить индукцию магнитного поля В.
Такие преобразователи иногда применяются для измерения магнитной индукции. Если, используя постоянный магнит, создать магнитное поле с постоянной индукцией В = const, то преобразователь может быть применен для преобразования тока в силу и измерения тока (рис. 2.1, в). Такие преобразователи называются магнитоэлектрическими и широко используются в измерительных механизмах электромеханических приборов.
Ферромагнитный сердечник втягивается в контур с током так, чтобы индуктивность контура была максимальной (рис. 2.1, г). В этом случае электромагнитная сила пропорциональна квадрату тока. Подобные преобразователи используются в электромагнитных измерительных механизмах электромеханических приборов.
Индуктированная ЭДС еинд возникает в контуре, находящемся во внешнем магнитном поле, при изменении потокосцепления. Для преобразователя, взаимосвязь которого с внешним магнитным полем характеризуется некоторым обобщенным параметром k при однородном внешнем магнитном поле с индукцией В, потокосцепление Ψ = kB и индуктируемая в контуре ЭДС еинд = —dΨ/dt = — (k∂B/∂t + B∂k/∂t). При неподвижном контуре (∂k/∂t = 0) ЭДС будет индуктироваться только в переменном магнитном поле. Для контура без сердечника при В = Вт sin ωt ЭДС е = ωSωBmcos ωt, где ω — число витков и S — площадь контура. Преобразователь, представляющий собой неподвижную катушку (рис. 2.1, д), может быть использован для измерения переменной магнитной индукции. В постоянном магнитном поле ЭДС индуктируется только в движущемся контуре, и для измерения индукции В контуру задают принудительное движение, например вращение с постоянной скоростью, как показано на рис. 2.1, е. Можно использовать преобразователь и для решения обратной задачи — определения по значению выходной ЭДС скорости при движении контура в поле с известной индукцией BN. Преобразователи, выходной величиной которых является ЭДС еинд, называются индукционными.
ЭМ преобразователи строятся таким образом, чтобы выделить зависимость между входной величиной и одной из перечисленных выходных величин, однако учитывать в большинстве преобразователей приходится проявление всех взаимосвязей. Так, на сердечник преобразователя (рис. 2.1, а) действует электромагнитная сила, которая может вызвать дополнительное перемещение сердечника, т. е. помеху, искажающую входную величину. На контур, в котором наводится ЭДС еинд (рис. 2.1, д), если он замкнут на конечное сопротивление и по нему протекает ток, действует сила, стремящаяся определенным образом ориентировать его относительно поля. Поворот контура под действием этой силы вызовет изменение индуктируемой ЭДС.
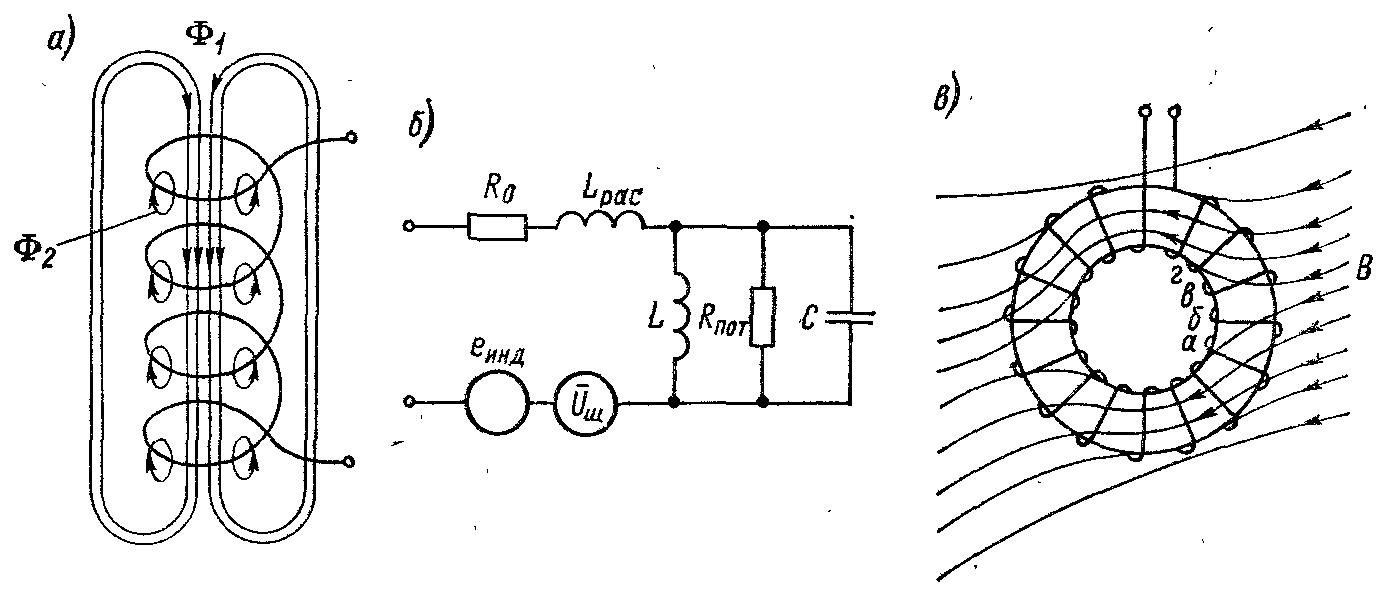 Рис.2.2
Рис.2.2
Эквивалентная схема одноконтурного ЭМ преобразователя. Преобразователь с контуром в виде обмотки, содержащей ω витков, показан на рис. 2.2, а. Основной поток Ф1 контура пронизывает всю обмотку и сцепляется со всеми витками. Однако некоторая часть потока Ф2, называемая потоком рассеяния, замыкается, не пронизывая ряд витков. Соответственно полная индуктивность контура имеет две составляющие: основную индуктивность L=ω2/ZM и индуктивность рассеяния Lpac = ω/Z'M, где ZM и Z'М — магнитные сопротивления основного потока и потока рассеяния. Если в обмотку преобразователя введем ферромагнитный сердечник, в котором концентрируется магнитный поток, то доля потоков рассеяния в общем потоке уменьшается и отношение L/Lpac увеличивается. Наименьшую индуктивность рассеяния имеет обмотка, выполненная на тороидальном сердечнике.
Однако при введении ферромагнетика появляются зависящие от частоты потери мощности на перемагничивание магнитопровода. Эти потери учитываются сопротивлением Rпот, включенным параллельно индуктивности L. Кроме того, в эквивалентной схеме должны быть учтены также межвитковые емкости; в области частот до 103— 104 Гц они учитываются в виде сосредоточенной емкости.
Эквивалентная схема преобразователя, в которой учтены сопротивление обмотки постоянному току Ro, основная индуктивность L, индуктивность рассеяния Lpac, емкость С и сопротивление потерь Rпот, приведена на рис. 2.2, б. В ней учтены также источники ЭДС еинд и Uш, которые характерны для ЭМ преобразователей. ЭДС еинд индуктируется в контуре, находящемся во внешнем магнитном поле. Эта ЭДС может быть информативной, как в индукционном преобразователе, но может являться и помехой. Для того чтобы уменьшить ту составляющую еинд, которая является помехой, преобразователи экранируются от внешнего магнитного поля, соединительные провода подводятся таким образом, чтобы не образовывать дополнительных контуров (см. рис. 2.1, д). Преобразователи, находящиеся в магнитных полях, защищаются от механических помех (вибрации, акустические воздействия), вызывающих колебания частей преобразователя и наведение ЭДС.
Уменьшить составляющую помехи е'инд можно, применяя в преобразователях симметричные магнитные цепи и симметричные обмотки. В качестве примера на рис. 2.2, в показана магнитная цепь в виде тороидального сердечника. При равномерной обмотке для каждого витка есть симметрично расположенный по отношению к магнитному потоку, пронизывающему тор, парный виток (например, витки б и в или а и г). ЭДС, наводимые в «парных» витках, компенсируют друг друга, и суммарная ЭДС е'инд при идеальной симметрии равна нулю.
В высокочувствительных ЭМ преобразователях с ферромагнитным сердечником иногда приходится считаться с напряжением шума, обусловленным в области средних частот главным образом эффектом Баркгаузена, т. е. импульсами ЭДС, вызываемыми скачкообразными смещениями доменных границ при перемагничивании ферромагнетика. Эффект Баркгаузена используется также при построении ряда преобразователей. Известно, что ферромагнетики состоят из большого числа элементарных областей (доменов), объем которых для разных типов ферромагнетиков составляет 10-3 — 10-6 мм3. Векторы намагниченности доменов ориентированы таким образом, что при отсутствии внешнего магнитного поля намагниченность образца в целом равна нулю. При наложении внешнего магнитного поля элементарные области перемагничиваются. Переориентация доменов может происходить скачками, при этом в витках обмотки индуктируются импульсы ЭДС е = -∆Ф/τ где ∆Ф — приращение магнитного потока, вызванное скачком Баркгаузена; τ — длительность скачка. Длительность скачков Баркгаузена составляет для разных материалов 10-3 — 10-7 с.
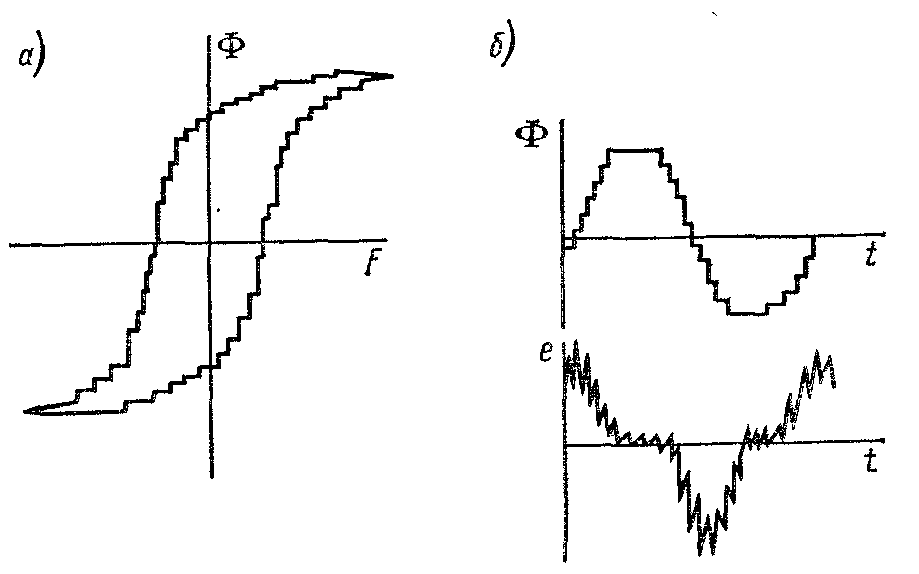
Рис.2.3
На рис. 2.3, а показан гистерезисный цикл со скачками Баркгаузена (масштаб скачков сильно увеличен, и они характеризуют процесс лишь с качественной стороны), на рис.2.3,б изображена кривая магнитного потока Ф=f(t) и кривая ЭДС е=φ(t). Ступеньки на кривой намагничивания неодинаковы по величине и меняют свое положение от цикла к циклу перемагничивания, магнитный шум является случайным процессом. Верхняя граница распределения f2 определяется длительностью скачков Баркгаузена и составляет 102— 106 Гц, в ферритах f2 может достигать 107 Гц. Нижняя граница f1 зависит от частоты перемагничивания f0 и составляет не менее f1 =3f0
ЭДС, вызываемая магнитным шумом, включается в эквивалентную схему ЭМ преобразователя (рис. 2.2, б). Однако, как правило, ЭДС Uш оказывается значительно меньше других помех, в частности еинд; поэтому с наличием Uш приходится считаться только в высокочувствительных преобразователях магнитных величин (феррозонды), в магнитных и параметрических усилителях.
Двухконтурный ЭМ преобразователь схематично показан на рис. 2.4. Преобразователи, содержащие два или несколько контуров, называют трансформаторными или взаимоиндуктивными. Если пропустить переменный ток через контур 1, то в контуре 2 будет индуктироваться ЭДС, зависящая от угла α между плоскостями контуров и максимальная при совпадении этих плоскостей (рис. 8-4, а). Поток, с которым сцепляется контур 2 при прохождении тока по контуру 1, равен Ψ2 = М12i1 где М12 = ω1 ω2 Re ZM/zM — взаимоиндуктивность контуров; ω1 и ω2 - числа витков контуров; ZM — магнитное сопротивление пути, по которому замыкается поток между контурами.
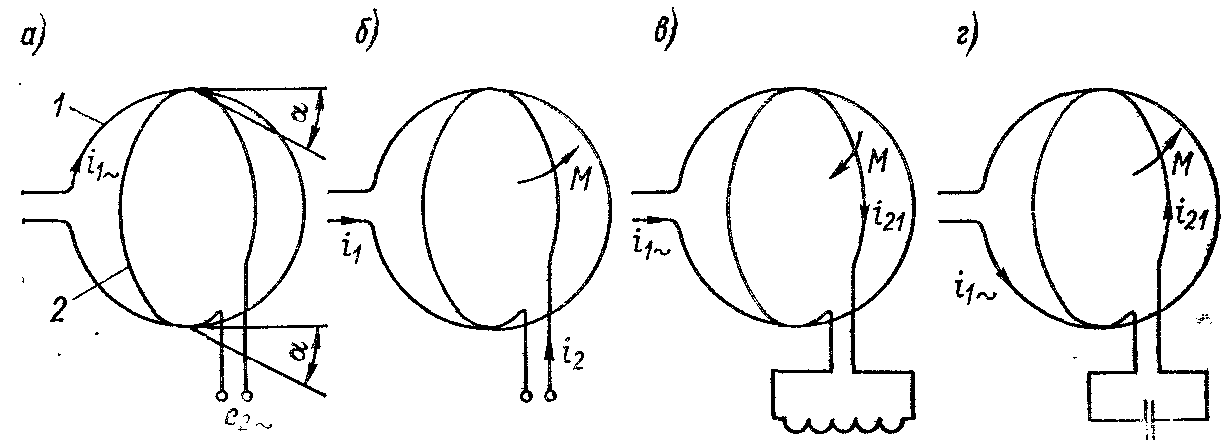
Рис. 2.4
При пропускании токов i1 и i 2 через оба контура между ними возникает механический электромагнитный момент М, стремящийся развернуть их так, чтобы магнитное поле было максимальным, т. е. чтобы плоскости контуров совпали (рис. 2.4, б). При этом если токи i1 и i2 переменные, то в образовании момента могут участвовать не только токи, создаваемые внешними источниками, но и токи i12 и i21, наводимые в каждом из контуров потоком соседнего контура. При чисто активном сопротивлении контура момент равен нулю, так как между наводящим потоком и наведенным током фазовый сдвиг составляет 90°. Если же контур замкнуть на индуктивное или емкостное сопротивление, то развиваемый момент будет максимальным и контур будет стремиться развернуться так, как показано на рис. 2.4, в и г.
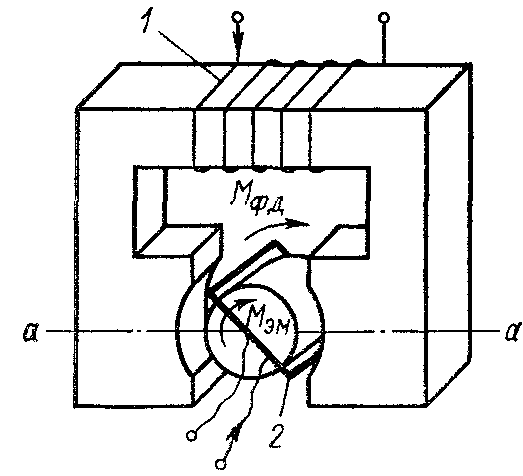
Рис. 2.5
Для того чтобы усилить электромагнитное поле и сконцентрировать его в определенной области, применяют ферромагнитные магнитопроводы. Пример двухконтурного преобразователя с ферромагнитным сердечником показан на рис. 2.5. Если через обмотку 1 проходит переменный ток, то в рамке 2 наводится ЭДС, зависящая от угла поворота рамки и максимальная, когда плоскость рамки перпендикулярна линии а — а. Если ток пропустить и через рамку 2, то на рамку будет воздействовать момент Мфд, стремящийся повернуть ее так, чтобы магнитное поле рамки совпало с магнитным полем обмотки. На короткозамкнутую рамку также воздействует момент Минд, вызываемый индуктированным в рамке током. Кроме того, между обмотками и ферромагнитным магнитопроводом действует электромагнитная сила или момент, стремящиеся расположить их так, чтобы магнитный поток, создаваемый соответствующей обмоткой, был максимальным. В примере на рис. 2.5 обмотка 1 оптимальным образом расположена относительно магнитопровода, поэтому между ней и. магнитопроводом такая сила не возникает; рамка 2 должна быть развернута так, чтобы ее плоскость была перпендикулярна линии а — а. Однако момент Мэм, направление которого показано на рис. 2.5, очень мал по значению, так как изменение магнитного поля рамки 2 мало зависит от ее поворота относительно магнитопровода.
Энергия электромагнитного поля определяется формулой
![]() (2.1)
(2.1)
Учитывая, как показано выше, что в преобразователе могут действовать, кроме потоков самоиндукции ΨL = ikLk, потоки взаимоиндукции ΨM = ipMkp и потоки внешнего поля Ψkвнеш, а токи в каждом из контуров, кроме составляющей тока от внешнего источника ik0, могут содержать еще и ток ikΨ, наведенный потоком Ψ, выражение для энергии первого контура можно представить состоящим из нескольких членов:
 (2.2)
(2.2)
Электромагнитная сила, действующая на первый контур, в соответствии с выражением энергии может иметь четыре составляющие fмэ, fэм, fэд и fинд, называемые соответственно магнитоэлектрической, электромагнитной, электродинамической и индукционной:
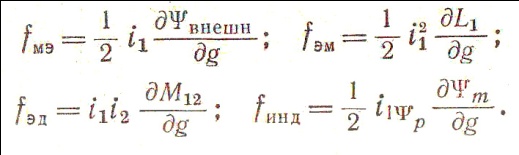 (2.3)
(2.3)
Характер изменения соответствующих сил во времени при синусоидальном входном токе показан на рис. 2.6, а — д. Из рисунка видно, что при постоянном потоке Ψвнеш сила fмэ пропорциональна мгновенному току, сила fэм имеет постоянную составляющую, пропорциональную квадрату действующего тока, Fэм= 1/2I2∂L/∂g и переменную составляющую, являющуюся второй гармоникой. Сила fэд имеет постоянную составляющую Fэд = I1 I2 cos (I1 ^ I2) ∂M12/∂g, пропорциональную произведению токов и косинусу угла между их векторами, и переменную составляющую, также зависящую от угла сдвига между токами. На рис. 2.6, г показан характер силы fэд, если токи имеют разную частоту.
Характер силы fинд зависит от сдвига между током в контуре и взаимодействующим с ним потоком Ψm. Сила fинд также имеет постоянную и переменную составляющие, особенностью которых является зависимость от частоты потока ΨP, наводящего ток в контуре, так как чем выше частота, тем больше ток i1Ψp=(∂ Ψp /∂l)* (1/Z1 ).
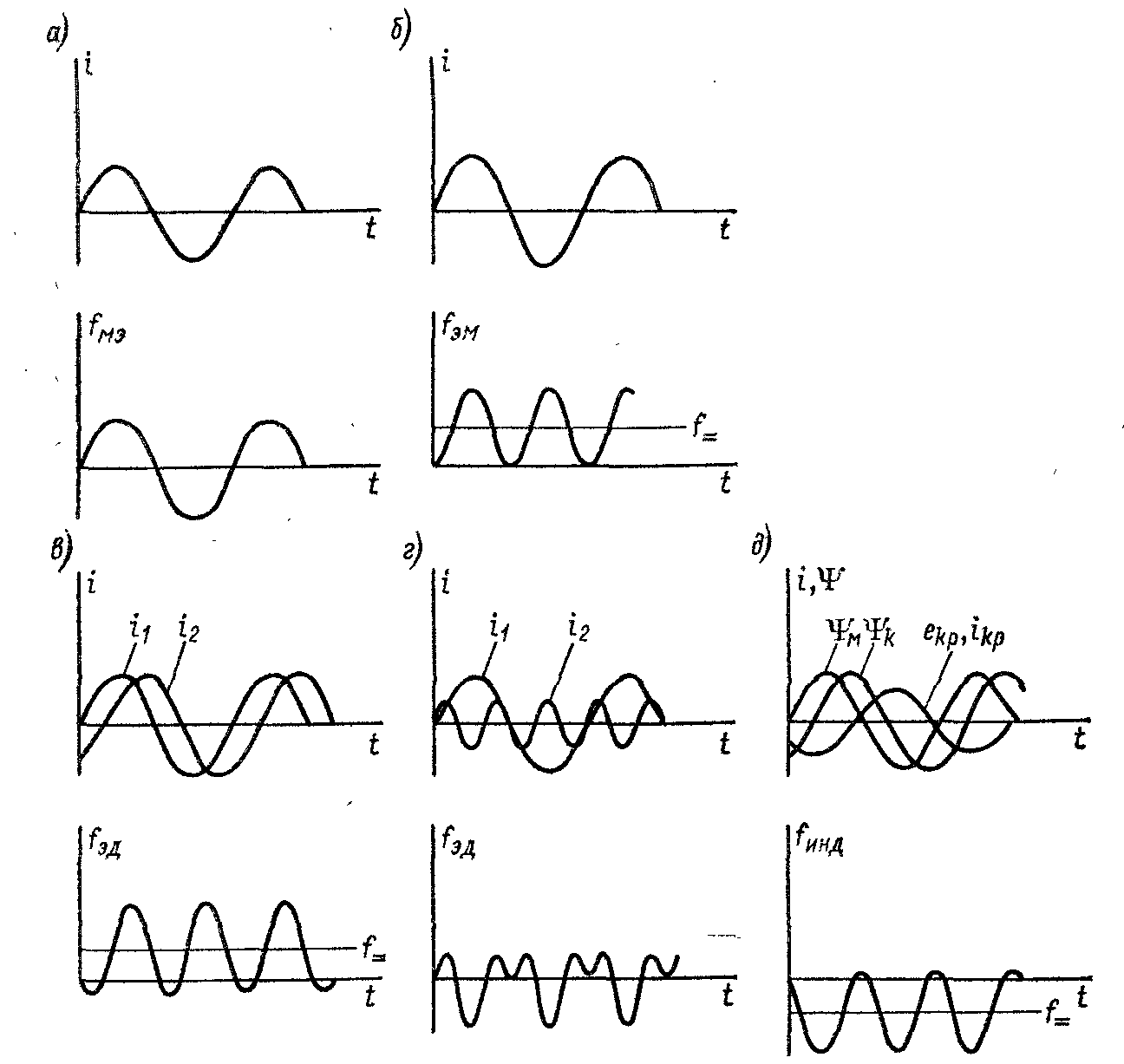 Рис.
2.6
Рис.
2.6
Погрешности
Суммарная погрешность прибора может быть выражена в виде абсолютной погрешности ∆B0i или в виде приведенной относительной погрешности δ = B0i / Bпред.
Большое практическое значение для минимизации суммарной погрешности при проектировании прибора, изготовлении и настройке имеет влияние ее мультипликативных и аддитивных составляющих.
Мультипликативными составляющими погрешности называют такие составляющие, которые максимально или иначе зависят от значения и направления вектора измеряемого поля B0.
Аддитивными составляющими погрешности называют такие составляющие, которые не зависят от вектора B0.
Разделяют их потому, что существуют способы их минимизации.
Уравнение преобразования для магнитометра постоянных полей имеет вид:
 (2.4)
(2.4)
где U – выходное напряжение, поступающее на РУ;
S – коэффициент преобразования;
В0 – значение (модуль) вектора измеряемого поля;
α – угол между вектором измеряемого поля В0 и магнитной осью феррозонда.
U0 – напряжение, характеризующее смещенный нуль (сдвиг) и шум канала.
При
 суммарная погрешность по входу составляет:
суммарная погрешность по входу составляет:
 (2.5)
(2.5)
 ,причем
ψij и
U0 малы.
,причем
ψij и
U0 малы.
Применительно к трехкомпонентному магнитометру:


 (2.6)
(2.6)

Первые 3 члена в правой части каждой строки – мультипликативные составляющие погрешности. Последние – аддитивные составляющие.
Формула (2.6) применяется тогда, когда отклонения от номинальных значений носят систематический характер. Если же эти отклонения – случайные величины, то пользуются следующей формулой:


 (2.7)
(2.7)

При измерении относительно сильных магнитных полей доминирующими оказываются мультипликативные погрешности, а аддитивной погрешностью можно пренебречь. При измерении же слабых магнитных полей на первый план выходят аддитивные погрешности.
Способы минимизации мультипликативных погрешностей
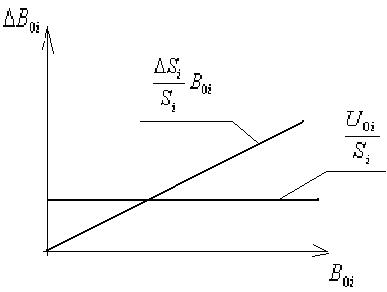
Мультипликативная погрешность, вызванная отклонением ∆Si коэффициента преобразования Si от своего номинального значения S* (∆Si = Si - S*)пропорциональна значению измеряемой составляющей поля В0i. Можно уменьшить эту погрешность за счет уравновешивания составляющей поля В0i в объеме феррозонда.
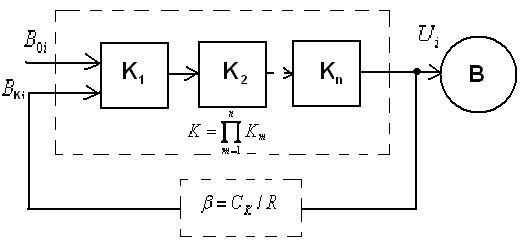
Уравновешивание осуществляется путем подачи тока в катушку компенсации, надетую на феррозонд.
В первой схеме ток компенсации формируют цепью обратной связи.
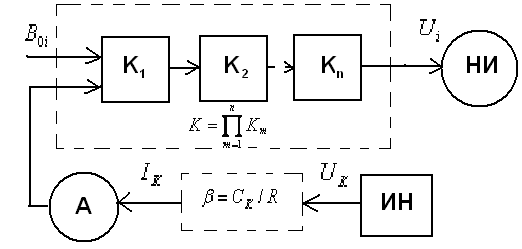
Во второй – ток подают от автономного источника, устанавливая момент компенсации по нуль-индикатору НИ.
k-цепь – цепь прямого преобразования.
β-цепь – цепь обратного преобразования.
Минимизация погрешности в 1 схеме достигается при условии:
 (2.8)
(2.8)
где
 - коэффициент прямого преобразования;
- коэффициент прямого преобразования;
 - коэффициент обратного преобразования;
- коэффициент обратного преобразования;
СК – постоянная катушки компенсации;
R – суммарное сопротивление цепи обратной связи.
 - если регистрации подлежит выходное
напряжение Uвых.
- если регистрации подлежит выходное
напряжение Uвых.
Если же регистрации подлежит ток обратной связи, то относительная погрешность коэффициента преобразования будет
 (определяется погрешностью постоянной
катушки компенсации)
(определяется погрешностью постоянной
катушки компенсации)
Минимизация мультипликативной погрешности во второй схеме достигается при условии
B0i = - Bki (2.9)
где Bki – поле компенсации.
В этом случае k-цепь выполняет роль нуль-индикаторной цепи, непосредственной регистрации подлежит напряжение или ток в β-цепи, следовательно, и погрешности вносятся элементами этой цепи.
Формулы аналогичные.
К приемам минимизации мультипликативных погрешностей также относятся:
выбор сердечников с наименьшей поперечной проницаемостью;
жесткое закрепление всех элементов феррозонда и обеспечение минимального угла непараллельности между продольной осью сердечника и осью ИК;
стабилизация амплитуды (или максимального значения поля возбуждения)

Способы минимизации аддитивных погрешностей
Следствием аддитивных погрешностей является внутренние и внешние помехи, воздействующие на различные элементы канала магнитометра.
Предположим, что помеха в виде ложного напряжения Uлp действует на входе p-го элемента канала магнитометра. Тогда ложный сигнал на выходе канала с обратной связью:
 (2.10)
(2.10)
Отсюда аддитивная погрешность имеет вид:
 (2.11)
(2.11)
Отсюда, в каком бы элементе канала не содержался источник ложного сигнала, значение приведенной ко входу аддитивной погрешности от глубины обратной связи не зависит. Поэтому основным способом минимизации аддитивной погрешности является выявление и возможное устранение самих источников этих погрешностей.
1. В электронной части прибора основным источником аддитивной погрешности является ГВ, вырабатывающий напряжение (ток) не только основной частоты f и нечетных гармоник (2n+1)f, но и четных 2nf.
Общими и достаточно эффективными приемами уменьшения и подавления четных гармоник напряжения генератора являются:
выбор такого режима работы всех его усилительных элементов, при котором нелинейные искажения становятся линейными;
построение генератора по двухконтактной схеме с элементами ее симметрирования.
Все современные генераторы содержат задающий каскад с кварцевым резонатором, обеспечивающим высокую стабильность частоты.
2. Основная частота и нечетные гармоники напряжения небаланса феррозонда, попадая на вход избирательного усилителя, вызывают в нем появление четных гармоник напряжения, а, следовательно, и ложного сигнала. Способы подавления ложных четных гармоник напряжения в ИУ те же, что и в генераторах.
3. СД и УПТ также вырабатывают ложные сигналы, но уже в виде постоянных напряжений. В схеме при «закорачивании» входа СД (при отключении выхода ИУ). Наименьший уровень ложного сигнала обеспечивают синхронны датчики, собранные по двухпериодной схеме на полевых транзисторах, а усилители постоянного тока – на основе операционных усилителей.