

10. Классификация приборов и систем. Структурная схема системы автоматического контроля (сак).
При контроле устанав степень соответствия м/у сост-ем объекта контроля и заданной нормой. Контроль, при кот-м описание норм задано в количественном виде с помощью аналоговых и цифровых установок и применяются для оценки состояния процесса пр-ва, называют технич. контролем. САК обеспеченная контролем большого числа величин и обработкой инф-ии, широко используется в АСУ ТП (АСУ технолог-ми проц-ми ).
Для получения результатов контроля инф-ии о соотношении текущего сост объекта и установ-ым нормальным, САК должна вып-ть след-ие фун-ии:
Восприятие входных величин и преобр-е соотв-их сигналов;
Формир и реали-я норм в аналоговых и цифровых видах, сравнение вых. велечин с описанием норм.
Формир-е и выдача колич-ых суждений о сост. объекта контроля;
Автом-ое упр-е работы системы;
Аналогово-цифровые преобразования;
Выдача анал-ой и цифр-ой инф-ии;
Обработка инф-ии;
Формирование актив-х возд-ий необх-х для получения котр-ой инф-ии;
Самоконтроль системы;
Некот-е фун-ии САК могут выпол-ся как аппар-ми, так и программными средствами.
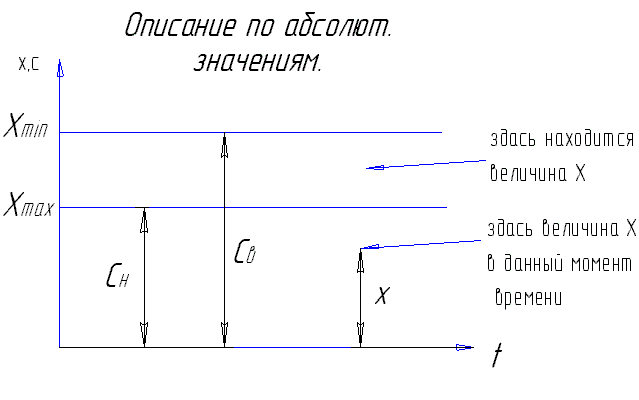
При вып-ии операции сравнения контр-ой величины, с одной установкой имеется возм-ть осущ-ть разделения сост-я конрол-ой величины на 2 области:
Х>C ; Х<C С-уставка. Одну из областей можно считать областью нормального состояния.
Для технолог-х проц-в помимо областей норм. режимов м.б. выделены обл-ти предаварийных и аварийных состояний.
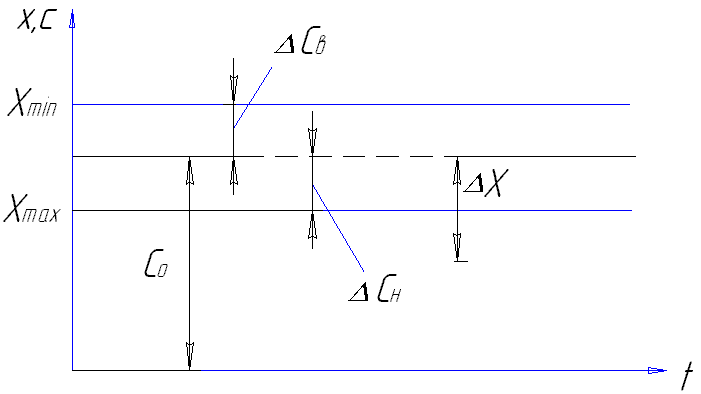
Нормы и контрольно-измерит. инф-я в САК м.б. описаны по абсолют знач-ям, либо по отклонению от номинальных значений.
САК подразделяют на специализированные и универсальные. Спец-е САК предназначены
Рассматривая физ. процессы в преобр. можно установить связь м/у вход и выход величиной.
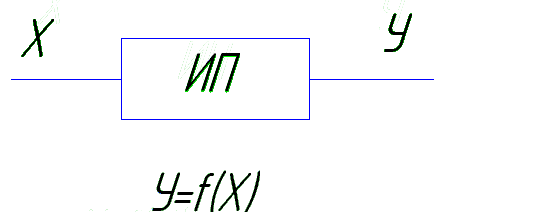
Отношение изменения вых величины к соответственному изменению входной величины – назыв чуствительностью датчика.

Иногда пользуются таким понятием как коэф-т преобразования – отношение вых вел-ны к соответ-му значению вх-ой величины

Если Y=f(X) линейна, то Y=K*X (желательно чтобы ф-я датчика была линейна)
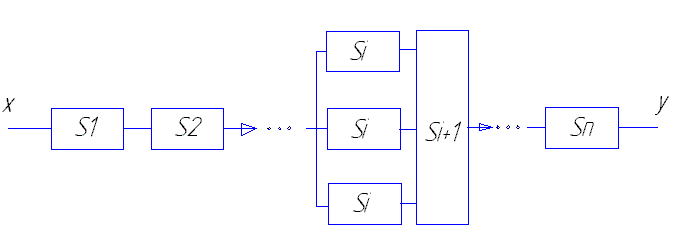
Чуствительность датчика определяется как произведение чуствительностей всех преобразователей. В этом случае схема представляется в виде последовательных отдельных звеньев.
1)
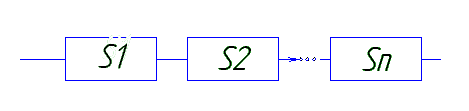 Структурная
схема датчиков прямого преобразования
Структурная
схема датчиков прямого преобразования
2)
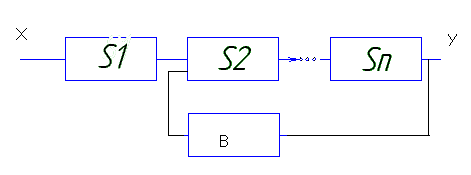
 Структурная
схема урав-го преоб-ия.
Структурная
схема урав-го преоб-ия.
 -
чуствит-ть цепи ур-го преобр.
-
чуствит-ть цепи ур-го преобр.
3 )
Структурная схема датчика с параллель-м
соед-м преобр-ей.
)
Структурная схема датчика с параллель-м
соед-м преобр-ей.
у=П Sn*∑Si
11. Датчики физических величин. Структурная схема тензорезисторного датчика усилия.
ТД предназначены для измер-ий усилий, деформ-й, моментов. Представляя ТД в виде послед-ой цепи измер-х преобр-ей можно заметить, что некоторые из этих преобразователей яв-ся общими для всех датчиков. Каждый ТД включает в себя: тензорезистор и измерит-ю цепь независимо от того яв-ся ли он датчиком усилия или перемещения. Многие ТД включают в себя упругие элементы преобр-е усилия или давления в деформацию.
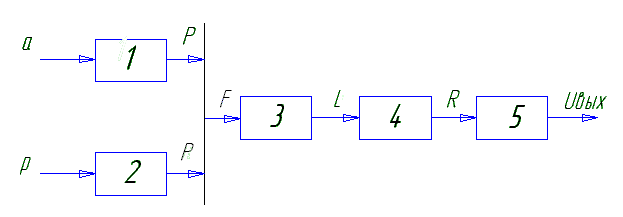
1-инерц груз
2-мембрана
3-упругий элемент
4-тензорезистор
5-измер-я цепь
На рис. изображены струк-ая схема ТД усилия. Измеряемое усилие Р с помощью упругого элемента преобразуется в деформацию ∆l , деформация измеряется в виде изменения сопротивления тензорезистора ∆R, которое в измер-й цепи
 -
сопротивление тензорезистора
-
сопротивление тензорезистора
Датчик (Д) – часть измер-ой сис-мы, имеющую самостоятельное конструктивное оформление, но вместе с тем обеспечив-ую достижение полезного эф-та при наличии всех других средств, входящих в систему.
Д осущ-ет преобразование вида энергии сигнала, идущего от объекта, в другой удобный для передачи инф-ии в пространстве и хранения в течении длительного времени.
Индуктивный преобразователь
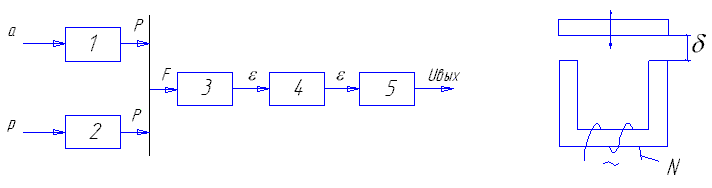
1-инерц. груз
2-мембрана
3-упругий элемент
4-индукционный преобр-ль
5-измерительная цепь

![]() ,
где R1,
R2
– сопр. ст. и возд.
,
где R1,
R2
– сопр. ст. и возд.
![]() ,
где S
– эффект-ая площ-дь мембраны, характер-ий
мембрану как измер-ый преобр-ль. Р –
входная величина (давление). F
– сила (вых-я величина).
,
где S
– эффект-ая площ-дь мембраны, характер-ий
мембрану как измер-ый преобр-ль. Р –
входная величина (давление). F
– сила (вых-я величина).
Входная величина стержневого упругого элемента:
 ,
ε – относ. деформ-я (вых. величина упр-го
элемента), S
– пл-дь попер-го сечения упр-го элемнта,
Е – модуль Юнга, F
– сила (вход. величина)
,
ε – относ. деформ-я (вых. величина упр-го
элемента), S
– пл-дь попер-го сечения упр-го элемнта,
Е – модуль Юнга, F
– сила (вход. величина)