

35. Нормируемые метрологические характеристики приборов и систем. Технические средства метрологических поверок. Сертификация приборов и систем. Физические величины и поля.
Метрологическим обеспечением приборов и систем поним-ся комплекс мер, направленных на достижение и подержание требуемой точности измерения. Метрологич. обеспечение ИС на стадии их разработки, произв-ва и эксплуатации решает разл. задачи. Должны быть выполнены метрологич. экспертиза проекта, технич. заданий и документации на ИС, разработка технич. средств и методик метрологич. аттестации и поверки ИС, гос. или ведомственные приемочные испытания. Метрологич. обеспечение ИС на стадии произв-ва включ. контрольные испытания и метрологич. надзор за технич. документацией и технологией изготовления ИС. В период эксплуатации должна быть обеспечена метрологич. аттестация в случае, когда условия эксплуатации отличаются от нормальных условий. Комплекс метрологич. хар-к ИС должен позволять с должной достоверностью оценить погрешность результатов измерения, получ. с помощью ИИС. В технич. документации на ИС определяю условия контроля метрологич. хар-к (МХ): объем выборки, допустимая погреш-ть измерения, минимально допустимое кол-во точек и их расположение в диапазоне измерения, условия проведения экспериментов. Хар-ки алгоритма вычислений контролируется экспериментально или расчетным методом на правильность регламентируемых значений. К нормируемым МХ основной погреш-ти относятся: моменты систематич. составляющей , дисперсия; указыв-ся предельные значения случ. погреш-ти от трения и гистерезиса; ф-я влияния χ(ξ)=А Δ ξ, А=const; передат. ф-я, переходная и импульсная ф-ии; входное и вых. полное сопротивление.
Технич. ср-ва метрологич. поверок
2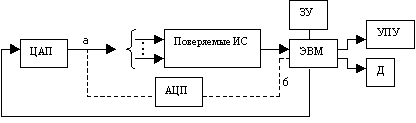 осн. пути реализации поверок,
осн. пути реализации поверок,
Путь а связан с испытанием для поверки калибраторов, формирующих образцовые сигналы, подаваемые на вход поверяемой ИС. Путь б предусматривает применение образцовых приборов для измерения сигналов, подаваемых на вход контролируемой ИС и сравнения рез-в измерения, получ. образцовыми ср-ми измерения и поверяемой ИС. Технич. ср-ва метрологич. поверки м.б. внешними по отношению к поверяемым ИС и встроенными в них.
Физические величины и поля и принципы их преобразования
Физич. величина – особенность, св-во общее в качественном отношении многим физич. объектам, но в количественном отнош. индивидуально для каждого объекта. Физ.величины классиф. на: электрич., магнитные, тепловые, механич. и т.д. Подавляющее большинство этих величин в процессе измерения преобр-ся в электрич., как наиболее удобные для передачи. Физич. поле – особая форма материи, система с бесконечным числом степеней свободы. К ним относятся электромагн., гравитационное, поля ядерных сил, волновые поля. Источниками физ. полей явл. частицы.
36 Расчет основных характеристик индуктивного преобразователя. Влияние внешней среды на параметры преобразователей.
И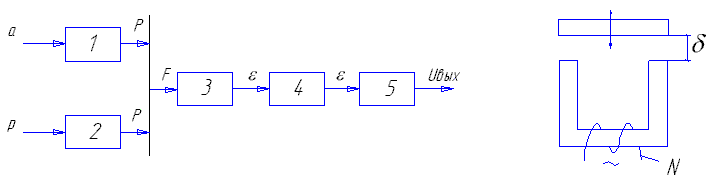 ндуктивный
преобразователь
ндуктивный
преобразователь
1 -инерц. груз
2-мембрана
3-упругий элемент
4-индукционный преобр-ль
5-измерительная цепь

![]() R1,
R2
– сопр. ст. и возд.
R1,
R2
– сопр. ст. и возд.
![]() ,
S
– эффект-ая площ-дь мембраны, Р – входная
величина . F
– сила
,
S
– эффект-ая площ-дь мембраны, Р – входная
величина . F
– сила
Входная величина стержневого упругого элемента:
 ,
ε – относ. деформ-я (вых. величина упр-го
элемента), S
– пл-дь попер-го сечения упр-го элемнта,
Е – модуль Юнга, F
– сила (вход. величина)
,
ε – относ. деформ-я (вых. величина упр-го
элемента), S
– пл-дь попер-го сечения упр-го элемнта,
Е – модуль Юнга, F
– сила (вход. величина)
Взаимодействие преобр-й с внешней средой
Усл-я эксплуатации на соврем. объектах измерения весьма разнообразны. Обеспечивается устойчивость датчика к воздействию внешних условий: темпер-ры, вибрации, уровня акустич. давления, электромагн. полей, радиации и т.д. Схема влияния на измерит. устр-во влияющих величин.
П огреш-ть
явл. случайной функцией: y(t)=f[x(t),
x1(t),…xn(t)],
где у(t)-выходной
сигнал устройства, f-оператор
преобр-я, х - измеряемый параметр функции
от времени t,
x1,…xn
-
дестабилизирующие факторы. Растущие
требования точности к функции преобр-я
вызывают необходимость изыскания
эффективных методов коррекции и
стабилизации хар-к вых. пар-в. После
изготовления датчика его реальная
функция преобр-я может отличаться от
номинальной вследствие методич.
погрешности. В этом случае возникает
задача коррекции реальной функции
преобр-ля, она может осущ. конструктивными
и схемными путями. В последнее время
получили развитие алгоритмические
методы коррекции.
огреш-ть
явл. случайной функцией: y(t)=f[x(t),
x1(t),…xn(t)],
где у(t)-выходной
сигнал устройства, f-оператор
преобр-я, х - измеряемый параметр функции
от времени t,
x1,…xn
-
дестабилизирующие факторы. Растущие
требования точности к функции преобр-я
вызывают необходимость изыскания
эффективных методов коррекции и
стабилизации хар-к вых. пар-в. После
изготовления датчика его реальная
функция преобр-я может отличаться от
номинальной вследствие методич.
погрешности. В этом случае возникает
задача коррекции реальной функции
преобр-ля, она может осущ. конструктивными
и схемными путями. В последнее время
получили развитие алгоритмические
методы коррекции.