

Построение планов скоростей.
Планом скоростей звена называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные скорости точек звена плоского механизма, а отрезки, соединяющие концы лучей, - относительные скорости соответствующих точек при данном положении звена.
План скоростей механизма представляет собой совокупность планов скоростей звеньев механизма с одним общим полюсом.
По теореме о сложении скоростей скорость точек равна:

Определим скорость точки А.
Скорость точки
А:.
![]() (
( )
Вектор полученной скорости
перпендикулярен кривошипу и направлен
в сторону его вращения.
)
Вектор полученной скорости
перпендикулярен кривошипу и направлен
в сторону его вращения.
Определим масштабный коэффициент планов скоростей, приняв длину
отрезка pva = 50 мм
Измерим длины отрезков (мм) планов скоростей и занесем их в соответствующую таблицу:
pva |
pvc |
pvb |
pvd |
ab |
cd |
pvs2 |
pvs4 |
50 50 50 50 50 50 50 50 50 50 50 50 |
50 50 50 50 50 50 50 50 50 50 50 50 |
0 30.2645 48.6454 50 37.9572 19.7355 0 19.7355 37.9572 50 48.6454 30.2645 |
0 19.7355 37.9572 50 48.6454 30.2645 0 30.2645 48.6454 50 37.9572 19.7355 |
50 43.6201 25.5648 0 25.5648 43.6201 50 43.6201 25.5648 0 25.5648 43.6201 |
50 43.6201 25.5648 0 25.5648 43.6201 50 43.6201 25.5648 0 25.5648 43.6201 |
37.5 41.7998 48.4154 50 45.9635 40.1947 37.5 40.1947 45.9635 50 48.4154 41.7998 |
37.5 40.1947 45.9635 50 48.4154 41.7998 37.5 41.7998 48.4154 50 45.9635 40.1947 |
![]()
Определим линейные и угловые скорости
V.C=
pvc |
V.A= pva μ.v |
V.B= pvb μ.v |
V.D= pvd μ.v |
V.BA= ab μ.v |
V.DC= cd μ.v |
1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 |
1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 1.466 |
0 0.887 1.426 1.466 1.113 0.579 0 0.579 1.113 1.466 1.426 |
0 0.579 1.113 1.466 1.426 0.887 0 0.887 1.426 1.466 1.113 0.579 |
1.466 1.279 0.75 0 0.75 1.279 1.466 1.279 0.75 0 0.75 1.279 |
1.466 1.279 0.75 0 0.75 1.279 1.466 1.279 0.75 0 0.75 1.279 |
 μ.v
μ.v
V.S2= pvs2 μ.v |
V.S4= pvs4 μ.v |
ω.4= v.DC/l.CD |
ω.2= v.BA/l.AB |
1.1 1.226 1.42 1.466 1.348 1.179 1.1 1.179 1.348 1.466 1.42 1.226 |
1.1 1.179 1.348 1.466 1.42 1.226 1.1 1.226 1.42 1.466 1.348 1.179 |
5.055 4.41 2.585 0 2.585 4.41 5.055 4.41 2.585 0 2.585 4.41 |
5.055 4.41 2.585 0 2.585 4.41 5.055 4.41 2.585 0 2.585 4.41 |
Сравним результаты определения скорости точки D по методу кинематических диаграмм и методу планов
метод кинематических диаграмм метод планов
V.D= v.D_ μ.vD |
0 0.581 1.119 1.435 1.39 0.902 0 0.902 1.39 1.435 1.119 0.581 |
v.D= pvd μ.v |
0 0.579 1.113 1.466 1.426 0.887 0 0.887 1.426 1.466 1.113 0.579 |
Построим график
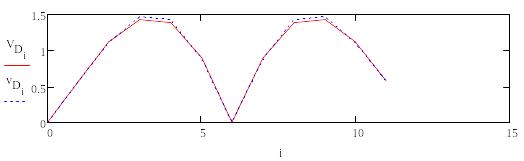
Из графика видно что погрешность методов несущественна. Определяем погрешность методов
pogr |
0 0.433 0.581 2.13 2.566 1.633 0 1.633 2.566 2.13 0.581 0.433 |