

Структурный анализ.
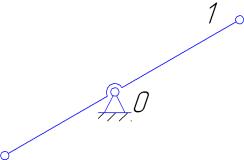
Механизм состоит из одного неподвижного звена - стойки 0, и пяти подвижных звеньев:
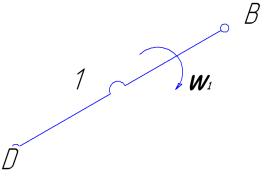
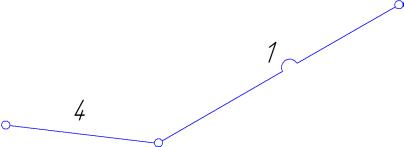
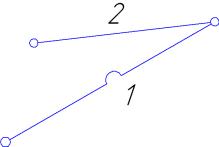
1 - кривошип;
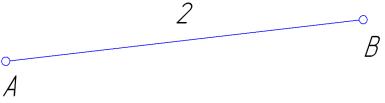
2 - шатун;
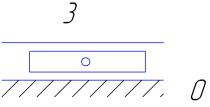
3 - плунжер;
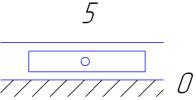
4 - шатун;
5 - плунжер.
Число
степеней подвижности механизма
определяется по формуле Чебышева:

![]()
где количество кинематических пар четвертого класса
![]() число подвижных
звеньев
число подвижных
звеньев
![]() количество
кинематических пар пятого класса
количество
кинематических пар пятого класса
![]()
Звенья |
Кинематические пары |
||
Изображение |
Движение |
Изображение |
Класс |
|
Стойка, неподвижна
Кривошип, вращательное
Шатуны, плоско- -параллельно
Плунжеры, возвратно-поступатель-ное
|
|
1-0 Вращ.V кл.
1-2 Вращ.V кл.
4-5 Вращ.V кл.
5-0 Пост.Vкл.
1-2 Вращ.V кл.
2-3 Вращ.V кл.
3-0 Вращ.V кл. |



Геометрический синтез.
Определим длину кривошипа (м)
![]()
Округляем, получаем значение(м)
![]()
Определяем длины остальных звеньев (м)
![]()
![]()
![]()
![]()
![]()
Построим
планы положений механизма, приняв длину
кривошипа на схеме
![]() ,
тогда масштабный коэффициент равен
(м/мм):
,
тогда масштабный коэффициент равен
(м/мм):
![]()
Построение кинематических диаграмм.
При кинематическом исследовании возникает задача определения закономерностей изменения перемещения, скорости и ускорения какого-либо звена или его точки за полный цикл движения механизма. Для решения этой задачи находят значения величин кинематических параметров для ряда, близко отстоящих друг от друга положений механизма, затем строят графики законов движения, называемых кинематическими диаграммами. Достаточно построить одну диаграмму, а остальные две получить из него графическим интегрированием или дифференцированием.
Строим диаграмму перемещений точки D поршня насоса. Диаграмму аналогов скоростей ползуна получим графически дифференцированием (методом хорд) диаграммы перемещений. Графически дифференцируя диаграмму аналогов скоростей, получим диаграмму аналогов ускорений. Высоты диаграмм занесем в соответствующие векторы (таблицу).
S.D_ |
v.D_ |
a.D_ |
0 7.2584 28.5930 61.4249 98.5930 128.5020 140.0 128.5020 98.5930 61.4249 28.5930 7.2584 |
0 29.0591 55.9713 71.7421 69.4880 45.0947 0 45.0947 69.4880 71.7421 55.9713 29.0591 |
58.0672 56.3048 45.9893 17.3446 29.0365 73.6436 91.9843 73.6436 29.0365 17.3446 45.9893 56.3048 |
Определим масштабные коэффициенты диаграмм при k = 40
![]()
![]()
![]()
![]()
Определим угловую скорость кривошипа (с-1):
![]()
Определим масштабные коэффициенты действительных скоростей:
![]()
![]()
Тогда действительные скорости, перемещения и ускорения будут равны
![]()
![]()
![]()
s.d |
v.d |
a.d |
0 7.258e-3 0.029 0.061 0.099 0.129 0.14 0.129 0.099 0.061 0.029 7.258e-3 |
0 0.581 1.119 1.435 1.39 0.902 0 0.902 1.39 1.435 1.119 0.581 |
23.227 22.522 18.396 6.938 11.615 29.457 36.794 29.457 11.615 6.938 18.396 22.522 |