

Вопрос 64 Автоматическое регулирование положения по отклонению. Следящий электропривод.
8.3. Автоматическое регулирование положения по отклонению
Автоматическое регулирование положения требует измерения углового или линейного перемещения рабочего органа механизма и использования устройств, задающих эти перемещения.
В простейшем варианте автоматическое регулирование положения предусматривается лишь на участках движения в районе заданных рабочих позиций, а на основной части пути перемещения от позиции к позиции система по выходной координате разомкнута. Этот вариант позволяет использовать индуктивные датчики ошибки позиционирования, вырабатывающие сигнал, пропорциональный отклонению рабочего органа от заданного положения. Датчики подключаются в зоне точного останова. Они обеспечивают автоматическое регулирование положения по отклонению от заданной точки пути с требуемой точностью.
При необходимости отработки дозированных перемещений, задаваемых на входе системы скачком, или при осуществлении программного управления перемещением рабочего органа механизма необходим постоянный контроль текущего положения, осуществляемый датчиками углового или линейного перемещения непрерывного или дискретного действия.
В данной главе ограничимся рассмотрением электроприводов постоянного тока, механическая часть которых с удовлетворительной точностью может быть представлена жестким механическим звеном, приведенным к валу двигателя. Для электроприводов позиционных механизмов кроме регулирования положения обычно требуются регулирование скорости и ограничение тока якоря в переходных процессах допустимым значением IЯ=Iстоп. Поэтому в качестве объекта регулирования положения примем однократно интегрирующую систему регулирования скорости в системе ТП—Д с подчиненным контуром регулирования тока. Дополнив ее интегрированием скорости ω для получения перемещения φ, введя обратную связь по положению с коэффициентом усиления kО.П и включив на вход регулятор положения, получим трехконтурную систему регулирования положения, структурная схема которой приведена на рис. 8.4.
Осуществим оптимизацию контура регулирования положения методом последовательной коррекции, определив необходимую для этой цели передаточную функцию регулятора положения. В соответствии с рис. 8.4 объект регулирования положения в данном случае имеет следующую передаточную функцию:
 (8.10)
(8.10)
Для получения передаточной функции разомкнутого контура регулирования положения вида
регулятор положения должен иметь передаточную функцию
 (8.11)
(8.11)
Передаточная функция замкнутого контура регулирования положения
 (8.12)
(8.12)
Проведем качественный анализ работы синтезированной системы регулирования положения при различных условиях. Сначала будем полагать, что система автоматического регулирования положения замыкается при подходе к зоне точного
8.4. Понятие о следящем электроприводе
Основное отличие следящего электропривода от систем точного позиционирования состоит в постановке задачи регулирования: обеспечение следования (слежения) положения исполнительного органа механизма φ' за изменяющимся по произвольному закону положением задающего органа <рз с ошибкой, во всех режимах работы не превышающей допустимого .значения. Поэтому рассмотренная выше трехконтурная система регулирования положения представляет собой следящий электропривод в тех случаях, когда замыкание электропривода, например по углу поворота исполнительной оси установки, имеет целью воспроизведение произвольно меняющегося угла поворота задающей оси, т. е. слежение исполнительной оси за движением задающей оси, с заданной точностью. При этом отработка заданного скачком угла поворота, т. е. рассмотренная выше отработка дозированных перемещений, является частным режимом работы следящего электропривода.
Воспроизведение с высокой точностью произвольных законов движения, задаваемых перемещением задающей оси `З(t), является одной из наиболее сложных задач автоматизированного электропривода. Произвольность движения задающей оси определяет исключительное многообразие условий работы электропривода, при котором проявляется влияние существенных нелинейностей системы, таких, как сухое трение при движении с малой знакопеременной скоростью, кинематические зазоры при движении со знакопеременным моментом двигателя и т. п. Высокие требования к точности воспроизведения угла поворота задающей оси требуют особо тщательного синтеза динамических качеств электромеханической системы, причем их удовлетворение сильно осложняется отмеченным ранее влиянием нелинейностей и наличием в системе упругих механических связей.
Ограничимся анализом динамической точности следящего электропривода с линейными жесткими механическими связями. Для этого получим изображение ошибки в трехконтурной системе, структурная схема которой показана на рис. 8.4, с помощью общей формулы ошибки (5.19):
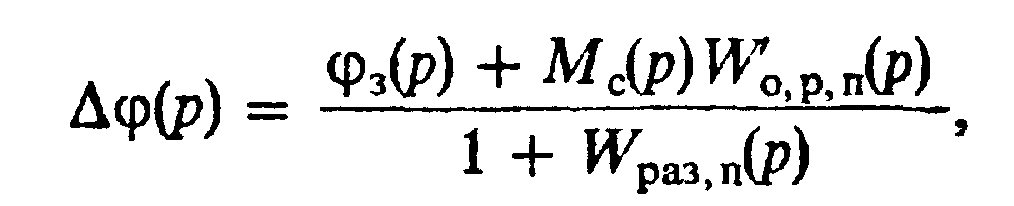 (8.30)
(8.30)
где W`o.р.п - передаточная функция объекта регулирования положения по возмущению Мс(р).