

Методы повышения точности систем регулируемого электропривода в условиях воздействия внешних возмущений: повышение порядка астатизма, адаптивное и комбинированное управление.
IR-компенсация


В соответствии с уравнение АД в статическом режиме для поддержания постоянства напряжения на статоре US можно выполнить коррекцию IR-компенсации на величину падения напряжения по активному сопротивления обмотки статора
I R-компенсация
является положительной обратной связью
и требует введение дополнительного
звена для обеспечения стабильной работы
R-компенсация
является положительной обратной связью
и требует введение дополнительного
звена для обеспечения стабильной работы
П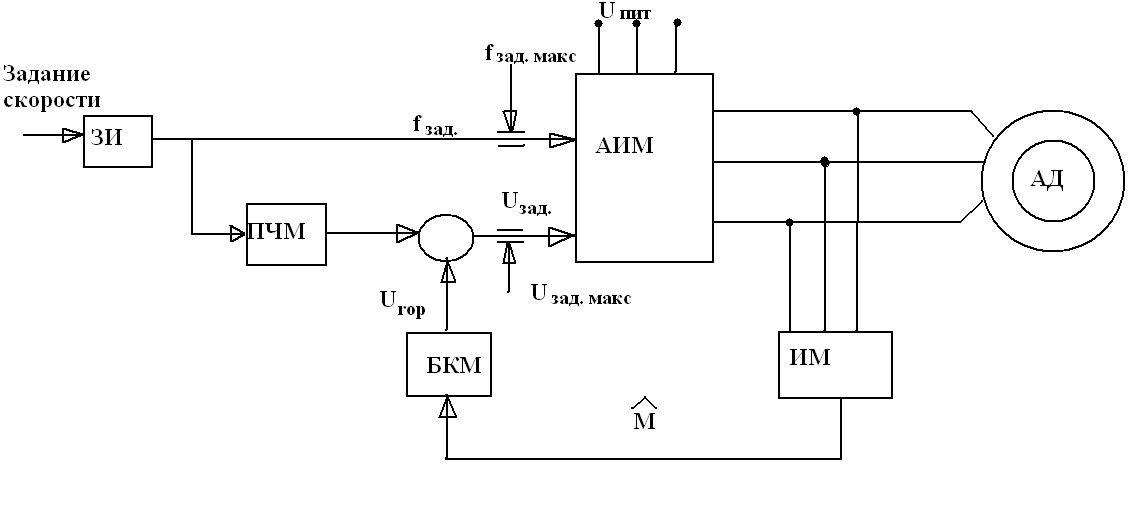 рименение
IR-компенсации при скалярном управлении
позволяет расширить диапазон регулирования,
снижает величину ошибки, повышает
перегрузочную способность ЭП при задании
малых скоростей.
рименение
IR-компенсации при скалярном управлении
позволяет расширить диапазон регулирования,
снижает величину ошибки, повышает
перегрузочную способность ЭП при задании
малых скоростей.
Компенсация моментов
ИМ- индикатор момента, БКМ-блок компенсации момента, ПЧН
- преобразователь частоты, напряжения, АИМ-автономный инвертор напряжения.
К омпенсация
момента позволяет оптимизировать
напряжение подводимое к статору АД в
зависимости от текущего момента нагрузки
на валу двигателя.
омпенсация
момента позволяет оптимизировать
напряжение подводимое к статору АД в
зависимости от текущего момента нагрузки
на валу двигателя.
К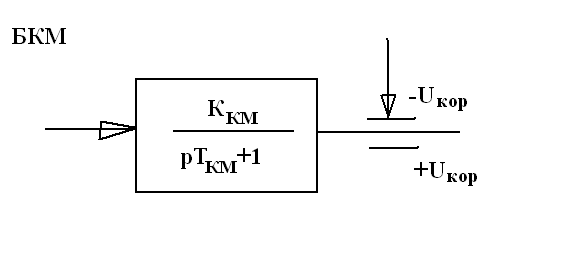 омпенсация
момента является ПОС (последовательной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивости работы ЭП:
омпенсация
момента является ПОС (последовательной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивости работы ЭП:
1. Постоянная времени ТКМ снижает быстродействие обр.связи
2. Коэффициент ККМ определяет глубину обратной связи
3. Ограничение на выходе БКМ
Компенсация скольжения
П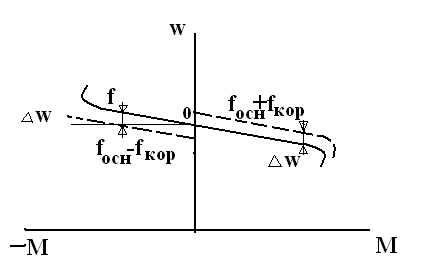 ри
работе ЭП с большими диапазоном изменения
нагрузки на валу АД возникает статическая
ошибка пропорциональная величине
скольжения и момента нагрузки
ри
работе ЭП с большими диапазоном изменения
нагрузки на валу АД возникает статическая
ошибка пропорциональная величине
скольжения и момента нагрузки
БКС- блок компенсации скольжения
П ри
скалярном регулировании скорости АД
для устранения ошибки скольжения
необходимо увеличить частоту напряжения
статора (дв. режим) на величину скольжения
определяемое нагрузкой на валу АД.
ри
скалярном регулировании скорости АД
для устранения ошибки скольжения
необходимо увеличить частоту напряжения
статора (дв. режим) на величину скольжения
определяемое нагрузкой на валу АД.
КС- является положительной обратной связью и необходимо принимать дополнительные меры для сохранения устойчивой работы ЭП. Точночть работы системы КС напрямую определяется точностью косвенного определения момента нагрузки.
В ПЧ принято различать коэффициент компенсации для скольжения двигательного и генераторного режима работы.
Комбинированное скалярное управление
Б


 лок
защиты позволяет уменьшить выходную
частоту во время перегрузки ЭП После
исчезновения перегрузки исходная частот
восстанавливается. В большинстве случаев
при скалярном управлении происходит
совместное использование систем
компенсации момента и компенсации
скольжения.
лок
защиты позволяет уменьшить выходную
частоту во время перегрузки ЭП После
исчезновения перегрузки исходная частот
восстанавливается. В большинстве случаев
при скалярном управлении происходит
совместное использование систем
компенсации момента и компенсации
скольжения.
Классическое подчиненное Регулирование для
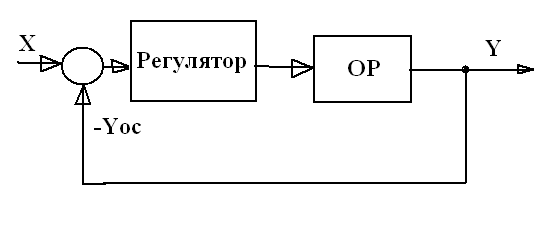 ЭП
переменного тока
ЭП
переменного тока

Ограничение координат в системах подчиненного регулирования электроприводов.
Ограничение на выходе регулятора тока ограничивает напряжение, соответственно на выходе регулятора потокосцепления и регулятора скорости, происходит ограничение тока, так как подчиненное регулирование.
Необходимость введения ограничений на входе
- ограничение максимальной амплитуды напряжения, подводимого в обмотках АД
- ограничение токов, протекающих в обмотках статора АД
- ограничение момента, развиваемого на
валу АД
ограничение момента, развиваемого на
валу АД
На выходе регуляторов составляющие вектора тока статора.


UX-формирование магнитного потока В АД
UY- формирование момента на валу АД
 -рекомендации
для уровня ограничения на выходе
регуляторов тока
-рекомендации
для уровня ограничения на выходе
регуляторов тока
Необходимость введения ограничений на выходе регуляторов потокосцепления и скорости.


IX- намагничивающая часть составляющей тока статора АД
IY- составляющая пропорциональна моментному усилию, развиваемому на валу АД
IMAX- максимальный ток статора АД, кратковременно допустимая перегрузка 2-3IНОМ
IXMAX- ограничение намагничивающей составляющей тока статора АД, 1.5-2IНОМ
IYMAX- определяет максимальный момент, развиваемый на валу АД, 2-3IНОМ