

2. Основные узлы блоков асинхронного сопряжения.
Блок асинхронного сопряжения тракта передачи содержит запоминающее устройство, временной дискриминатор и формирователь (передатчик) команд согласования скоростей. Блок асинхронного сопряжения тракта приема содержит ЗУ, приемник команд согласования скоростей и устройство фазовой автоподстройки.
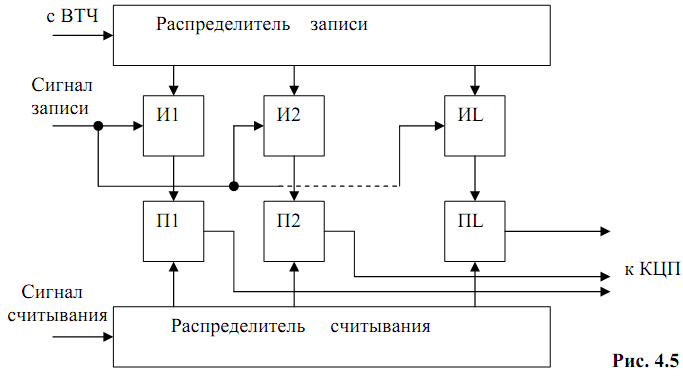
ЗУ. Информационные символы через логические ячейки И записываются последовательно в ячейки памяти П. Процессом записи управляют импульсы тактовой частоты. Эти импульсы через распределитель записи открывают поочередно ячейки И, через которые производится запись сигнала. Считывание производится импульсами, поступающими с соответствующих выходов распределителя считывания. Из-за наличия в цикле передачи служебных импульсов частота считывания превышает частоту записи. Это является причиной появления временных сдвигов. Импульсные позиции временных сдвигов используются для передачи служебных команд. При формировании временных сдвигов на вход ЗУ продолжают поступать информационные импульсы и для их записи предусматривают дополнительные ячейки памяти. Минимально необходимое число ячеек памяти составляет от пяти до восьми.
Временной дискриминатор. Служит для контроля временных интервалов между моментами записи и считывания, и формирования сигнала запуска передатчика команд согласования скоростей, когда эти интервалы достигают величины, при которой становится необходимым соответствующее согласование скоростей.
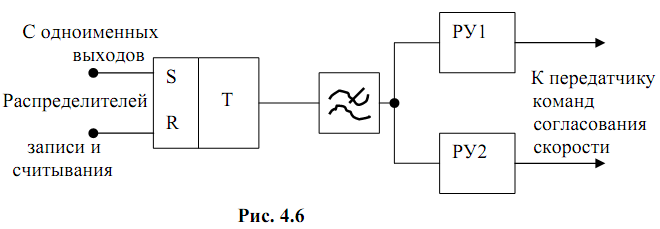
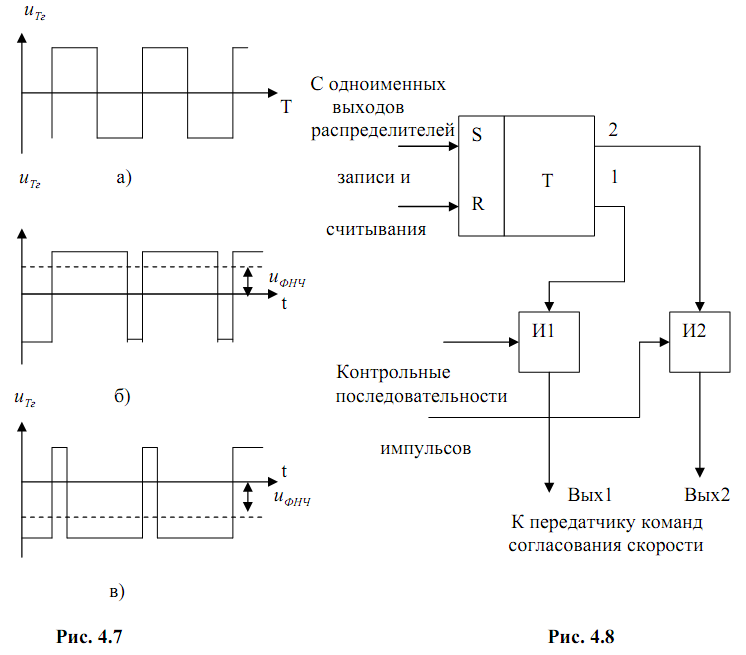
Временной дискриминатор может быть аналоговым и цифровым. На раздельные входы триггера подаются импульсные последовательности с одинаковых по номеру выходов распределителей записи и считывания. Тогда на выходе триггера формируется двухполярная последовательность импульсов. Ее скважность определяется взаимным временным положением импульсов записи и считывания. Из этой последовательности импульсов с помощью фильтра нижних частот выделяется постоянная составляющая, которая подается к решающим устройствам для положительных (РУ1) и отрицательных (РУ2) напряжений. Величина напряжения на выходе ФНЧ зависит от разности длительностей положительных и отрицательных импульсов на выходе триггера. Если при нормальной работе запоминающего устройства момент считывания сдвинут относительно момента записи на половину периода тактовой частоты, скважность сигнала на выходе триггера равна двум и напряжение на выходе ФНЧ будет равно нулю (рис. 4.7а). Когда временной интервал между импульсами записи и считывания достигает величины, при которой необходимо согласование скорости (рис. 4.7б, в), на выходе ФНЧ появляется достаточное по величине положительное или отрицательное напряжение для срабатывания соответствующего решающего устройства и к передатчику согласования скорости посылается сигнал, соответствующий положительному либо отрицательному согласованию скоростей.
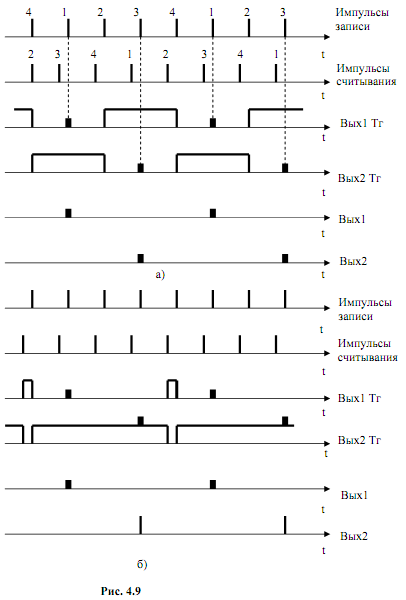
Структурная схема цифрового временного дискриминатора рис. 4.8. Здесь импульсы с выходов триггера подаются к ячейкам И1 и И2. На другие входы этих ячеек подводятся контрольные последовательности импульсов с распределителя записи. Временные положения этих последовательностей выбираются так, чтобы при нормальном режиме запоминающего устройства на ячейках И импульсы с триггера не совпадали по времени с контрольными импульсами. При временных интервалах между импульсами записи и считывания, достигающих величин, при которых необходимо согласование скоростей в зависимости от ее вида, на выходе соответствующей ячейки И появляется импульс, поступающий затем к передатчику КССпер. Пусть, например, запоминающее устройство содержит четыре ячейки памяти, и триггер управляется с четырех выходов распределителей записи и считывания; контрольные последовательности импульсов к ячейкам И1 и И2 подаются соответственно с первого и третьего выходов распределителя записи. В этом случае, как показано на рис. 4.9а, при нормальном режиме работы запоминающего устройства импульсы на выходах триггера имеют одинаковую длительность, контрольные импульсные последовательности на ячейках И1 и И2 (с первого и третьего выходов распределителя записи) совпадают с нулевыми положениями импульсов соответственно от выходов триггера 1 и 2 и на выходах ячеек И будут нулевые символы.
Если же контрольная последовательность импульсов на ячейке И2 ( с третьего выхода распределителя записи ) совпадает с импульсами на втором выходе триггера (рис. 4.9б), то на выходе И2 формируется сигнал, по которому производится отрицательное согласование скорости. Аналогично формируется сигнал на выходе И1, когда необходимо положительное согласование скоростей.
Формирователь команд согласования скоростей. Команды согласования скоростей должны обладать примерно такой же помехоустойчивостью, как и синхросигналы. Это объясняется тем, что искажение упомянутой команды в системе передачи n-го порядка вызовет сбой цикловой синхронизации в соответствующей этой команде системе (n-1)-го порядка и затем сбой цикловой синхронизации во всех объединяемых системах более низкого порядка. Сигналы команд согласования скоростей содержат информацию только об однократных изменениях в цикле передачи, и поэтому для обеспечения необходимой помехоустойчивости такие команды передают помехоустойчивыми кодовыми группами.








В системах с односторонним
согласованием скоростей необходимо
передавать информацию лишь о двух
состояниях: согласование скоростей не
производилось или произошло. Поэтому
здесь количество символов, требуемое
для передачи указанной информации,
гораздо меньше, чем в системах с
двухсторонним согласованием скоростей.
Действительно, для передачи информации
о том, производилось либо не производилось
согласование скоростей, достаточно
одного двоичного разряда, и для защиты
от искажений одного символа команды
согласования скоростей достаточно
использовать трехразрядную кодовую
группу. Для защиты двух символов –
пятиразрядную кодовую группу и т. д. На
практике для передачи команд согласования
скоростей используются трехразрядные
кодовые группы вида 111 и 000. В системах
с двусторонним согласованием скоростей
необходимо передавать информацию о
трех возможных состояниях: согласование
скоростей не производилось, произошло
положительное согласование скоростей
и произошло отрицательное согласование
скоростей. В этом случае защиту от
искажений одного символа команды
согласования скоростей обеспечивают
пятиразрядные кодовые группы, от
искажения двух символов – семиразрядные
кодовые группы и от искажений трех
символов – девятиразрядные кодовые
группы. Однако, для того, чтобы обеспечить
такую же помехозащищенность, как в
системе с односторонним согласованием
скоростей при одинаковом числе разрядов
кодовых групп команд согласования
скоростей, возможно использование
системы с двусторонним согласование
скоростей и двухкомандным управлением.
По числу передаваемых команд такая
система идентична системе с односторонним
согласованием скоростей. При двухкомандной
передаче команд согласования скоростей
при малых расхождениях частот следования
импульсных последовательностей записи
и считывания формируются чередующиеся
по знаку команды (рис. 4.10а, в). Когда
временной интервал между импульсами
записи и считывания превышает период
импульсов считывания
 ,
формируются две подряд следующие команды
одного знака (рис. 4.10б, в), по которым
производится коррекция временных
положений импульсов считывания.
,
формируются две подряд следующие команды
одного знака (рис. 4.10б, в), по которым
производится коррекция временных
положений импульсов считывания.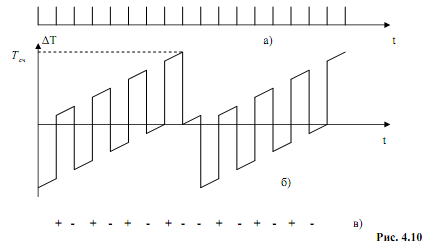
Приемник команд согласования скоростей.
В приемнике команд согласования
скоростей производится опознавание
вида и коррекция ошибок принимаемых
команд. Обычно команды согласования
скоростей передаются кодовыми группами
вида 00..0 и 11…1, что позволяет реализовать
опознаватель этих команд в виде счетчика
числа импульсов и осуществить правильное
их опознавание, если число искаженных
символов не превосходит половины общего
числа символов в команде. Если число
подсчитанных импульсов больше половины
общего числа символов в команде,
принимается решение о передаче команды
11…1, если же меньше половины, - о передаче
команды 00…0. Ошибки опознавания не
исключены и поэтому предусматривается
их коррекция. Они наиболее просто
корректируются в системах с односторонним
согласованием скоростей и с двусторонним
согласованием скоростей и двухкомандным
управлением. Как уже отмечалось, в таких
системах при временных интервалах
импульсов записи и считывания, меньших
,
формируются чередующиеся по знаку
команды согласования скоростей (рис.
4.11а, б) и, когда указанный временной
интервал достигает величины
 ,
вырабатываются две подряд следующие
команды одинакового знака (рис. 4.11д).
,
вырабатываются две подряд следующие
команды одинакового знака (рис. 4.11д).
Искажение одной из чередующихся команд приводит к появлению трех подряд следующих команд одного знака (рис. 4.11в, г). По этому признаку можно обнаружить и скорректировать искажение чередующихся команд согласования скоростей. Если же искажается одна из сдвоенных команд, то формируется сдвоенная команда противоположного знака. Для обнаружения и коррекции такого искажения необходимо передавать информацию по специальному цифровому каналу о знаке изменения временного интервала между моментами записи и считывания.
Он содержит опознаватель сигнала команды согласования скоростей, анализатор временных сдвигов и корректор ошибок. После опознавания команды согласования скоростей поступают на анализирующее устройство и корректор ошибок. Если временные сдвиги между импульсами записи и считывания в передающем блоке БАС достигают величины , то на соответствующий вход анализирующего устройства поступают сдвоенные команды ( ++ или -- ), по которым на выходе ячеек И формируется необходимый сигнал для коррекции временного положения импульсов считывания.
При искажении команды согласования скоростей, когда формируются три подряд следующие команды одного знака ( +++ или --- ), со счетчика команд ( + ) или ( - ) корректора ошибок выдается сигнал коррекции ошибок.