

Исследование законов регулирования / Колебательность(к лабе №2)
.docИспользование П=регулятора:
-
Канал управления:
Определим
колебательность:
![]()
-
Канал возмущения:
Определим
колебательность:
![]()
Использование ПИ=регулятора:
-
Канал управления:
Определим
колебательность:
![]()
-
Канал возмущения:
Определим
колебательность:
![]()
Использование ПИД=регулятора:
Т.к. при рассчитанных настройках ПИД-регулятора система потеряла устойчивость, то необходимо подобрать настройки регулятора методом подбора так, чтобы система приобрела необходимые показатели качества.
Варьируя время
дифференцирования и коэффициент усиления
получим следующие настройки ПИД-регулятора:
![]() ;
;![]() ;
;![]() .
.
-
Получим переходную характеристику по каналу управляющего воздействия:
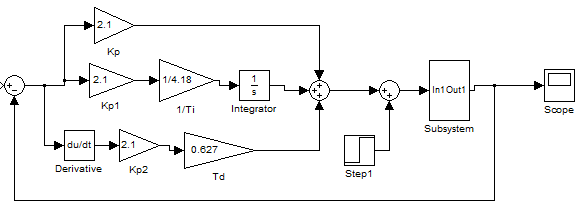
Схема:


-
Определим время переходного процесса:
 .
. -
Определим статическую ошибку:
 .
.
-
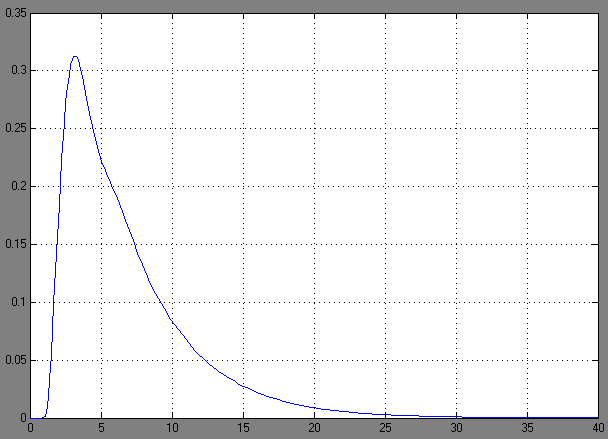
Получим переходную характеристику по каналу возмущающего воздействия:
Схема:
-
Определим время переходного процесса:
 .
. -
Определим время установления (достижение первого max):
-
Определим статическую ошибку:
 .
.