

14. Що означає регулювання швидкості при постійному моменті і при постійній потужності?
В багатьох механізмах для забезпечення високої продуктивності і якості необхідно здійснювати регулювання швидкості електроприводу.
Регулюванням швидкості ЕП називається примусова зміна його швидкості в залежності від вимог технологічного процесу.
Регулювання здійснюється додатковим впливом на електродвигун або систему передач до виробничого механізму людиною або від спеціалізованого автоматичного пристрою. Регулювання можна здійснювати механічним шляхом за допомогою ступінчатих шківів, набору шестерень (зубчатих коліс), фрикційних регульованих передач. На даний час все більше використовується електричне регулювання швидкості, яке має ряд технічних і економічних переваг. Однак не слід плутати регулювання швидкості з природною зміною швидкості обертання, яка виникає при зміні навантаження на валу двигуна.
Розглянемо роботу двигуна постійного струму
З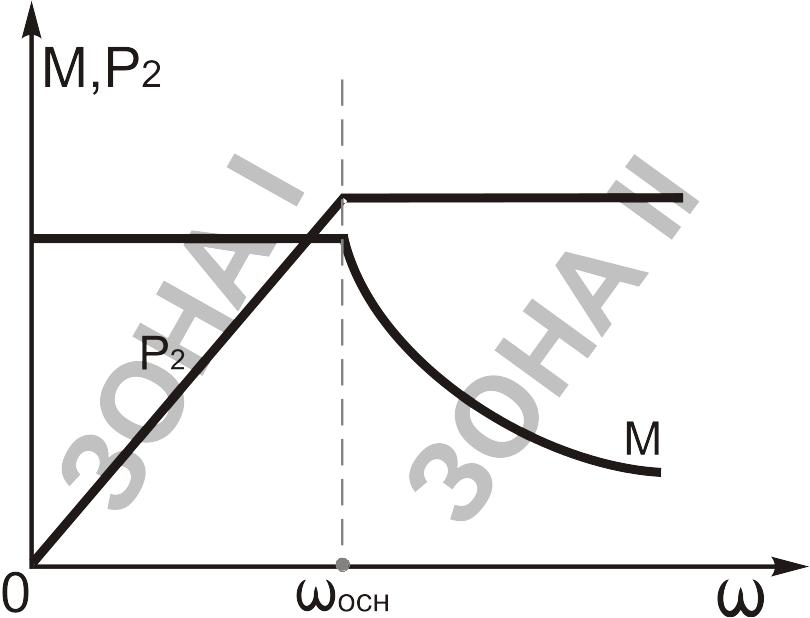 она
1
відповідає
регулюванню швидкості зміною опору або
напруги при незмінному значенні
магнітного потоку. Ф=соnst
при I=Iп=const,
тому момент двигуна також буде постійним
М=KмФнІн=соnst,
а
потужність змінюється пропорційно
швидкості.
она
1
відповідає
регулюванню швидкості зміною опору або
напруги при незмінному значенні
магнітного потоку. Ф=соnst
при I=Iп=const,
тому момент двигуна також буде постійним
М=KмФнІн=соnst,
а
потужність змінюється пропорційно
швидкості.
З
Рис.1 – Зони роботи електроприводу
15. Поясніть, в чому полягає різниця між регулюванням швидкості зміною додаткового опору в колі якоря і зміною магнітного потоку? Проілюструйте графічно.
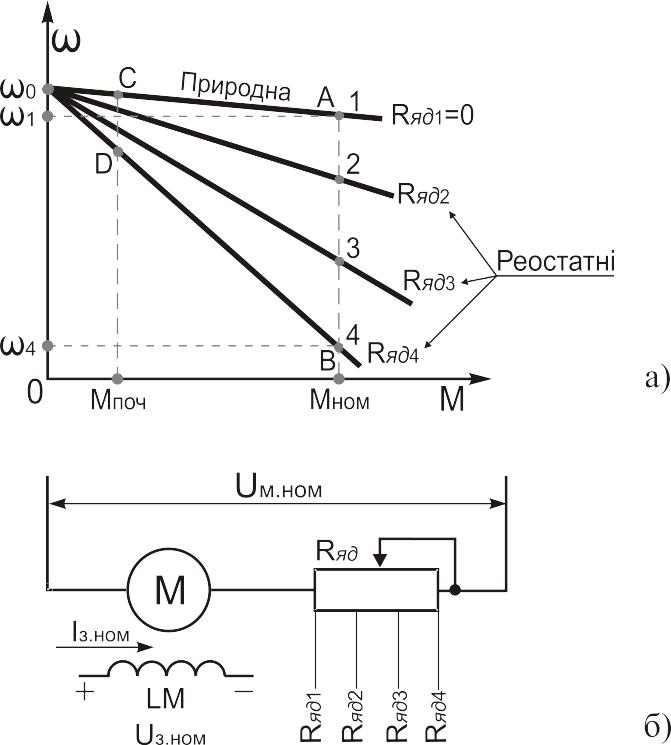
Регулювання кутової швидкості змінюванням опору якірного кола (фрагмент б рисунка 4.5) не вимагає особливих пояснень. Цей спосіб випливає з розглянутих раніше реостатних характеристик ДПС НЗ (фрагмент а рисунка 4.5).
 а
– механічні характеристики;
а
– механічні характеристики;
б – схема.
Рисунок 4.5 – Уведення додаткового опору в коло якоря.
Цей спосіб називається реостатним, є вельми простий за своєю реалізацією і тому широко використовується для регулювання швидкості, момента, струму й інших координат.
Сім’я реостатних
характеристик (дивись фрагмент а
рисунка 4.5) виходить із однієї точки,
точки ідеального неробочого ходу 0,
тобто величина 0
не залежить від опору
![]() .
Нахил характеристик визначається опором
якірного кола (при фіксованому значенні
момента) і при зростанні опору
.
Нахил характеристик визначається опором
якірного кола (при фіксованому значенні
момента) і при зростанні опору
![]() збільшується (зменшується жорсткість
характеристик). Регулювання здійснюється
при номінальних параметрах двигуна
(змінюється тільки опір
якірного кола):
збільшується (зменшується жорсткість
характеристик). Регулювання здійснюється
при номінальних параметрах двигуна
(змінюється тільки опір
якірного кола):
![]() ;
;
![]() ;
;
![]() .
.
Регулювання швидкості ДПС НЗ змінюванням величини магнітного потоку широко використовується в електроприводах внаслідок простоти його реалізації й значної економічності.
Регулювання магнітного потоку при використанні цього способу здійснюється тільки у бік його зменшення (послаблення) порівняно з номінальним. Тому часто цей спосіб називають способом послаблення поля.
Причини цього сховані за наступними двома обставинами.
1 обставина. Збільшення магнітного потоку повинно викликатися збільшенням струму збудження, але оскільки номінальний магнітний потік створюється номінальним струмом збудження, то збільшення струму збудження вище номінального викликає додатковий неприпустимий нагрів двигуна.
2 обставина. Двигун розрахований і побудований таким чином, що його магнітна система близька до насичення ще при роботі двигуна у режимі неробочого ходу. Тобто, робоча точка двигуна розташована на кривій намагнічування у межах насичення, тому намагання подальшого збільшення струму збудження не може спричинити збільшення магнітного потоку.
Сім’ю штучних
характеристик регулювання можна одержати
(рисунок 4.7) при розгляді зміни координат
точок неробочого ходу (![]() )
й короткого замикання (
)
й короткого замикання (![]() )
при варіюванні магнітного потоку,
оскільки у відповідності до формули
)
при варіюванні магнітного потоку,
оскільки у відповідності до формули
![]() ,
,
змінювання
магнітного потоку призведе до змінювання
![]() (електромеханічні характеристики
перетинають вісь ординат у різних
точках).
(електромеханічні характеристики
перетинають вісь ординат у різних
точках).
Струм короткого замикання визначається із формули
![]() .
.
Оскільки при КЗ
швидкість
![]() (якір нерухомий), то
(якір нерухомий), то
![]() ,
,
![]() ,
,
![]() .
.
Тобто струм
короткого замикання від магнітного
потоку не залежить, буде залишатися
незмінним, а точка короткого замикання
![]() (фрагмент а
рисунка 4.7) буде спільною для сім’ї
електромеханічних характеристик
(фрагмент а
рисунка 4.7) буде спільною для сім’ї
електромеханічних характеристик
![]() .
.
Цих даних досить
для побудови штучних електромеханічних
характеристик, які перетинають вісь
абсцис в одній точці (
)
і мають різні значення
![]() і кожне з яких більше, ніж
.
і кожне з яких більше, ніж
.
Момент короткого замикання має вираз
![]()
оскільки
![]() ,
то при зменшенні магнітного потоку
пропорційно йому зменшується й момент
,
то при зменшенні магнітного потоку
пропорційно йому зменшується й момент
![]() .
.
а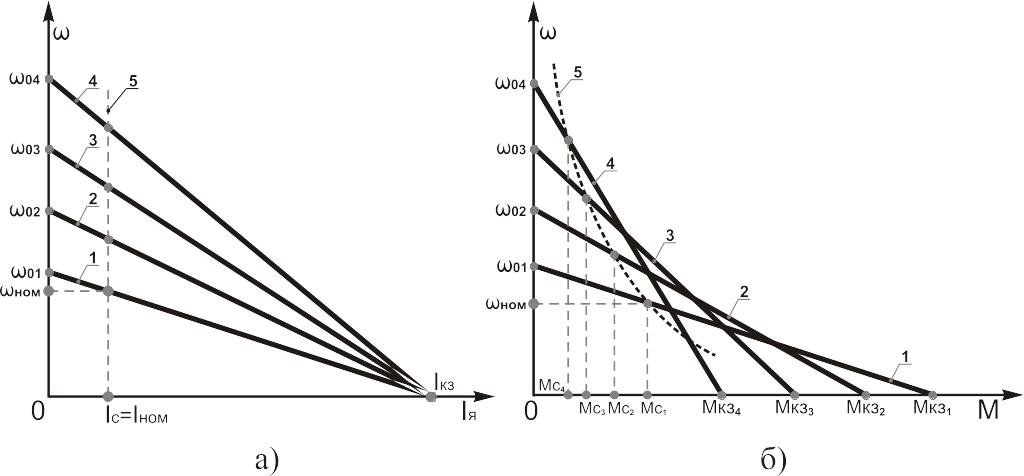 – електроме-ханічна хара-ктерритика;
– електроме-ханічна хара-ктерритика;
б – механічна характеристика.
Рисунок 4.7 – Статхарактеристики при послабленні поля.