

9. Назвіть можливі способи пуску привода з дпс незалежного збудження
Д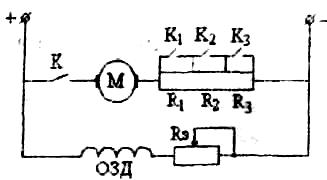 ля
схеми вмикання на рис. 1 пуск здійснюється
в такій послідовності: спочатку
замикається контакт К, потім через певні
проміжки часу по мірі зростання швидкості
двигуна замикаються відповідно контакти
К1,К2,К3, шунтуючи відповідні ступені
опорів R1,
R2,
R3.
Коли
всі контакти замкнуться і пускові
резистори будуть зашунтовані, двигун
буде працювати з
заданою
швидкістю на природній характеристиці.
(Рис.1 – Схема
вмикання ДПС при пуску)
ля
схеми вмикання на рис. 1 пуск здійснюється
в такій послідовності: спочатку
замикається контакт К, потім через певні
проміжки часу по мірі зростання швидкості
двигуна замикаються відповідно контакти
К1,К2,К3, шунтуючи відповідні ступені
опорів R1,
R2,
R3.
Коли
всі контакти замкнуться і пускові
резистори будуть зашунтовані, двигун
буде працювати з
заданою
швидкістю на природній характеристиці.
(Рис.1 – Схема
вмикання ДПС при пуску)
У відповідності з характеристикою 1-2 двигун збільшує швидкість до значення в т.2, після чого шунтується перша ступінь опору; момент зростає до величини М1(т.3), а швидкість залишається незмінною. Далі швидкість зростає відповідно характеристиці 3-4 до т.4, в якій здійснюється перехід на нову характеристику (замикається К2 і шунтується друга ступінь) і т.д., поки двигун не вийде на природну характеристику. Механічні характеристики дня заданої схеми вмикання приведені на рис. 2
Номінальним опором двигуна постійного струму називається такий опір, який необхідно включити в коло якоря, щоб при нерухомому якорі і номінальній напрузі, обмежити струм до номінального значення:
Розрахунок пускових опорів здійснюється аналітичним або графоаналітичним способом. Будують природну характеристику за паспортними даними. Опори ступенів пускового реостату визначають на основі величини ординат величин відрізків на лінії, проведеній через М=Мн.
О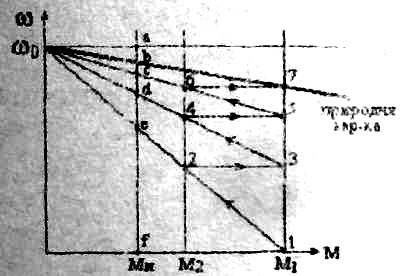 рдината
af у відносних одиницях рівна номінальному
опору Rн.
Ординати ае, аd,
ас рівні відповідним опорам окремих
ступенів якірного кола двигуна. Окремі
секції реостату R1,
R2,
R3
мають
відповідно опори, які відповідають
відрізкам dе,
сd,
bс.
рдината
af у відносних одиницях рівна номінальному
опору Rн.
Ординати ае, аd,
ас рівні відповідним опорам окремих
ступенів якірного кола двигуна. Окремі
секції реостату R1,
R2,
R3
мають
відповідно опори, які відповідають
відрізкам dе,
сd,
bс.
Рис. 3.4 – Пускова характеристика ДПС
10(9,13,35,35,14)Назвіть і поясніть основні способи гальмування привода з дпс
Д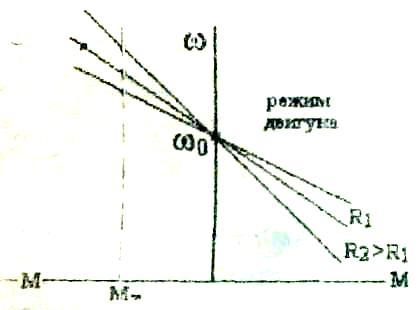 ля
того,
щоб
зменшити швидкість
двигуна, зупинити
його
або
змінити напрям
обертання
використовують
такі
режими гальмування: генераторне,
динамічне, гальмування противмикання.
ля
того,
щоб
зменшити швидкість
двигуна, зупинити
його
або
змінити напрям
обертання
використовують
такі
режими гальмування: генераторне,
динамічне, гальмування противмикання.
Г
Рис.
3.5 –
Механічні
характеристики при генераторному
гальмуванні
Рівняння механічної характеристики має вигляд

Перевага: Даний режим є енергоощадним, так як забезпечує генерування електричної енергії в мережу.
Недолік: Гальмування цим способом здійснюється лише при умові ω0<ω; неможливо загальмувати двигун до повної зупинки.
Д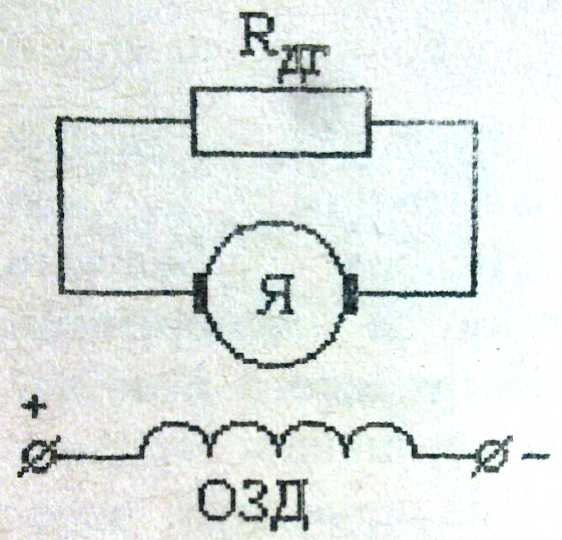 инамічне
гальмування здійснюється, якщо обмотку
якоря двигуна вимкнути від мережі і
замкнути на додатковий опір. Обмотка
збудження при цьому продовжує отримувати
живлення.
инамічне
гальмування здійснюється, якщо обмотку
якоря двигуна вимкнути від мережі і
замкнути на додатковий опір. Обмотка
збудження при цьому продовжує отримувати
живлення.
Рівняння механічної характеристики має вигляд

М
Рис.
1
– Схема
вмикання
при
динамічному
гальмуванні
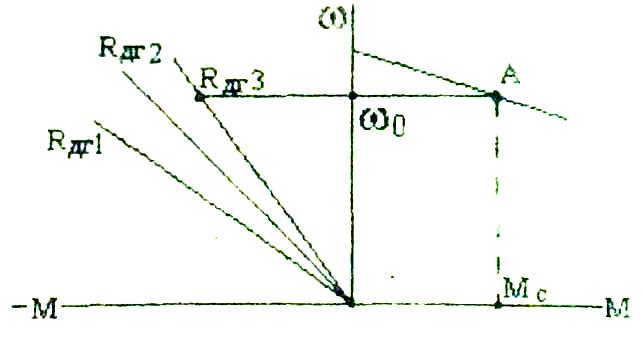
Рис.2 – Механічні характеристики при динамічному гальмуванні
Перевага: Гальмування здійснюється до повної зупинки двигуна
Недолік: Енергія магнітного поля виділяється у вигляді тепла на гальмівному опорі
Гальмування проти вмикання здійснюється, якщо змінити напрям струму в колі якоря і незмінному напрямі струму в обмотці збудження. Для обмеження величини струму в коло якоря вмикають додатковий опір.
Рис.4 – Механічні характеристики при
гальмуванні противмиканням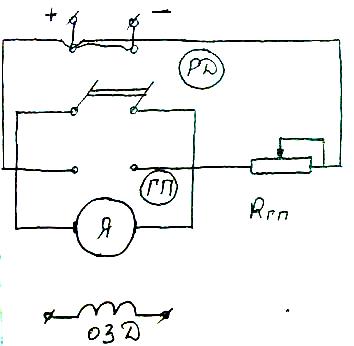
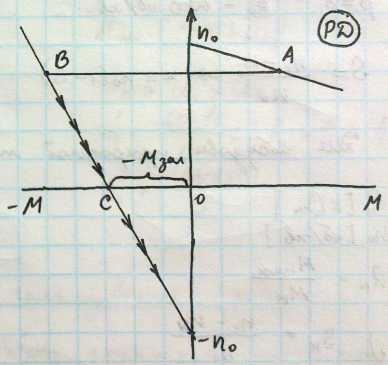
Рис.3 – Схема вмиканні при гальмуванні
противмиканням
При підході до т.С , в якій ω=0 двигун вимикають від мережі, інакше під дією залишкового гальмівного моменту Мзал, якір двигуна почне обертатися в протилежному напрямі і швидкість його буде збільшуватися до значення ω0.
Перевага: Даний режим є універсальним, так як дозволяє зупинити двигун, а також змінити напрям обертання якоря.
Недолік: Даний режим можна застосовувати для механізмів, які забезпечують обидва напрями обертання.