

35 Які параметри визначають електромагнітну постійну часу і постійну часу нагріву?
Перехідними (динамічними) режимами ЕП звуться режими роботи при переході від одного усталеного стану ЕП до іншого, які відбуваються під час пуску, гальмування, реверсування, різкого прикладення навантаження на валу. Ці режими характерні змінюванням ЕРС, кутової або лінійної швидкостей, момента й струму.
У будь-якому перехідному режимі ЕП одночасно й взаємопов’язано між собою діють перехідні механічні, електромагнітні й теплові процеси.
Всі ці фактори уповільнюють протікання перехідних режимів. Ступінь впливу інерційностей того чи іншого виду визначається інерційними сталими.
Електромагнітна
інерція характеризується електромагнітною
сталою часу ТЕ.
Вона визначається співвідношенням
індуктивності
![]() ,
,
![]() та активного опору
та активного опору
![]() ,
,
![]() :
:
 ,
,
![]() .
.
Теплова інерція
характеризується сталою
часу нагрівання
![]() .
Вона характеризується співвідношенням
теплоємності
.
Вона характеризується співвідношенням
теплоємності
![]() ,
,
![]() та теплопередачі
та теплопередачі
![]() ,
,
![]() :
:
 ,
.
,
.
Розрахунок перехідних режимів ЕП в основному зводиться до одержання, або побудови залежностей
![]() ;
;
![]() ;
;
![]() .
.
36 Для чого потрібне вивчення перехідних процесів в електроприводі?
Перехідним або динамічним режимом (процесом) електроприводу називають, режим роботи при переході з одного встановленого стану приводу до іншого, який відбувається під час пуску, гальмування, реверсування і різкої зміни навантаження на валу. Ці режими характеризуються змінами ЕРС, кутової швидкості, моменту і струму.
Вивчення перехідних режимів ЕП має суттєве практичне значення для правильного вибору електрообладнання (потужності двигуна, комутаційної та іншої апаратури), для розрахунку систем керування, витрат енергії на запуск, гальмування й реверс, для визначення впливу роботи ЕП на продуктивність і якість роботи виробничих механізмів (наприклад, скорочення часу на протікання перехідних процесів подовжує час роботи ЕП в усталених режимах, які визначають продуктивність праці).
Вивчення перехідних режимів електроприводу має велике практичне значення. Результати їх розрахунків дозволяють правильно визначити потужність електричних двигунів і апаратури, розрахувати систему керування і оцінити вплив роботи електроприводу на продуктивність і якість виробничих
механізмів.
При розрахунку перехідних процесів необхідно побудувати залежності:
i=f1(t), M=f2(t), =f3(t).
В перехідному режимі електроприводу одночасно і взаємопов'язано між собою діють перехідні механічні, електромагнітні і теплові процеси. Якщо перехідні процеси протікають швидко, то зміна теплового стану електроприводу не впливає на інші процеси, тому при вивченні перехідних режимів в електропривода зміна теплового стану не враховується.
Електромагнітні перехідні процеси викликані електромагнітною інерцією обмоток електричних машин і апаратів. Однак при пуску і гальмуванні впливом електромагнітних процесів нехтують і тому розглядають механічні процеси, в яких враховується лише механічна інерція рухомих мас електроприводу.
Серед методів розрахунку перехідних процесів виділяють аналітичний, графоаналітичний, кожен яких має свої підпункти.
37 Проаналізувати перехідні процеси (механічні та електромеханічні) в електроприводі з двигуном постійного струму незалежного збудження.
Пуск ДПС НЗ з урахуванням електромагнітного перехідного процесу
У тих випадках,
коли час протікання електромагнітних
перехідних процесів сумірний з часом
протіканням електромеханічних перехідних
процесів, слід ураховувати і вплив
електромагнітної інерції якоря (![]() ).
Пускові характеристики при цьому (за
умов, що
).
Пускові характеристики при цьому (за
умов, що
![]() )
будуть мати вигляд, поданий на рисунку
5.7.
)
будуть мати вигляд, поданий на рисунку
5.7.
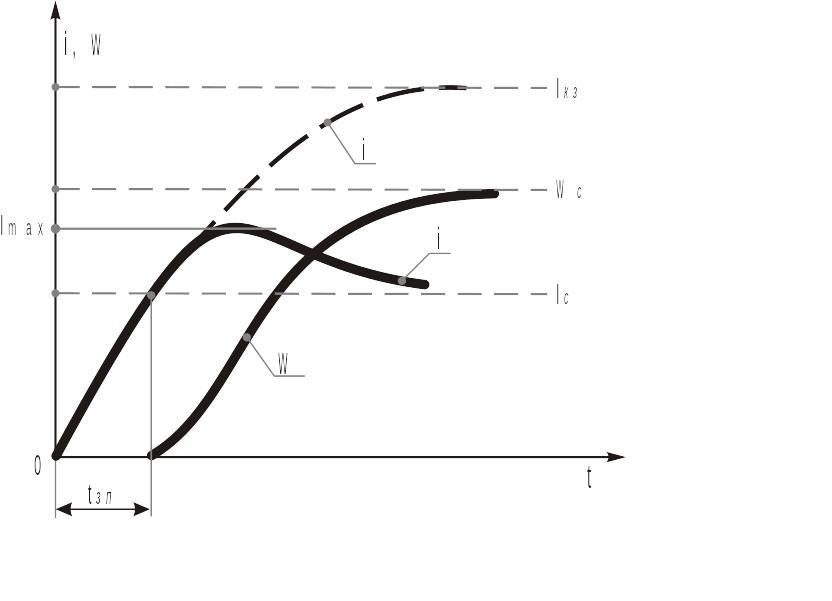
Рисунок 5.7 – Пуск ДПС НЗ з урахуванням індуктивності якоря.
Як видно, запуск складається з двох етапів.
1-й етап. Двигун нерухомий, поки струм якоря не досягне значення, необхідного для створення момента зрушування. На цьому етапі збільшення струму якоря залежить від швидкості протікання електромагнітного процесу, яка визначається рівнянням рівноваги напруги для якірного кола
![]() (5.9)
(5.9)
Розв’язання
рівняння (5.9) при індуктивності якоря
![]() дає закон змінювання струму в якорі
при нерухомому якорі:
дає закон змінювання струму в якорі
при нерухомому якорі:
 де:
де:
![]() - струм короткого замикання двигуна,
[А];
- струм короткого замикання двигуна,
[А];
![]() - електромагнітна
стала часу якірного кола, [с].
- електромагнітна
стала часу якірного кола, [с].
Крива струму
якоря, що побудована за рівнянням
(5.10), на графіку знаходиться у межах
часу від нуля до
![]() .
.
– час запізнення, визначається із (5.10) при підстановці у (5.10) значення
![]() .
.
Тоді (5.10) прийме такий вигляд:
 .
.
2 етап. Після закінчення часу якір починає обертатися. Кутова швидкість збільшується, з’являється ЕРС якоря, яка впливає на струм якоря. Тепер уже обидва процеси (електромагнітний та електромеханічний) протікають спільно, складаючи єдиний перехідний процес пуску ДПС НЗ.
Розрахунок струму
якоря й кутової швидкості двигуна (за
умов
![]() )
слід проводити на підставі рівняння
рівноваги напруги якірного кола та
рівняння руху:
)
слід проводити на підставі рівняння
рівноваги напруги якірного кола та
рівняння руху:
![]() ,
,
або
![]() ;
(5.12)
;
(5.12)
![]() . (5.13)
. (5.13)
Поділивши (5.13) на
![]()
![]() (оскільки
(оскільки
![]() ),
маємо:
),
маємо:
![]() ,
,
![]() . (5.14)
. (5.14)
Спільне розв’язання
(5.12) та (5.14) призводить до одержання двох
лінійних диференційних рівнянь другого
порядку (одне відносно струму
![]() ,
друге відносно кутової швидкості
).
,
друге відносно кутової швидкості
).
Інтегрування цих рівнянь і дає залежності
![]() ,
,
![]() ,
,
які зображені на
графіку (дивись рисунок 5.7) у інтервалі
часу
![]() .
.
У інтервалі часу
![]() є тільки струм, який змінюється ще при
нерухомому якорі (1-й етап). Штриховою
лінією зображено змінювання струму
якоря, якби протікав тільки електромагнітний
перехідний процес (1-й етап) за рівнянням
(5.10).
є тільки струм, який змінюється ще при
нерухомому якорі (1-й етап). Штриховою
лінією зображено змінювання струму
якоря, якби протікав тільки електромагнітний
перехідний процес (1-й етап) за рівнянням
(5.10).
Як видно з названого
графіка, кутова швидкість, змінюючись
асимптотично, наближається до усталеного
значення
![]() при заданому навантаженні, а струм
переходить усталене значення
при заданому навантаженні, а струм
переходить усталене значення
![]() при заданому навантаженні, досягає
максимуму
при заданому навантаженні, досягає
максимуму
![]() ,
а тільки потім наближається до асимптоти
.
Величина
залежить від співвідношення
,
а тільки потім наближається до асимптоти
.
Величина
залежить від співвідношення
![]() та
.
та
.
Реальні
співвідношення
та
такі, що при прямому пуску (
– мале, оскільки RЯ=
RЯВ+
RЯД,
а RЯД=0),
може перевищувати допустимі за умов
якості комутації значення. Тому прямий
запуск можливий для ДПС НЗ потужністю
до (0,5÷1,0) кВт. При більшій потужності
запуск треба здійснювати тільки через
додатковий резистор
![]() у якірному колі. При цьому
зменшується, а
збільшується і виявляється, що
у якірному колі. При цьому
зменшується, а
збільшується і виявляється, що
![]() .
.
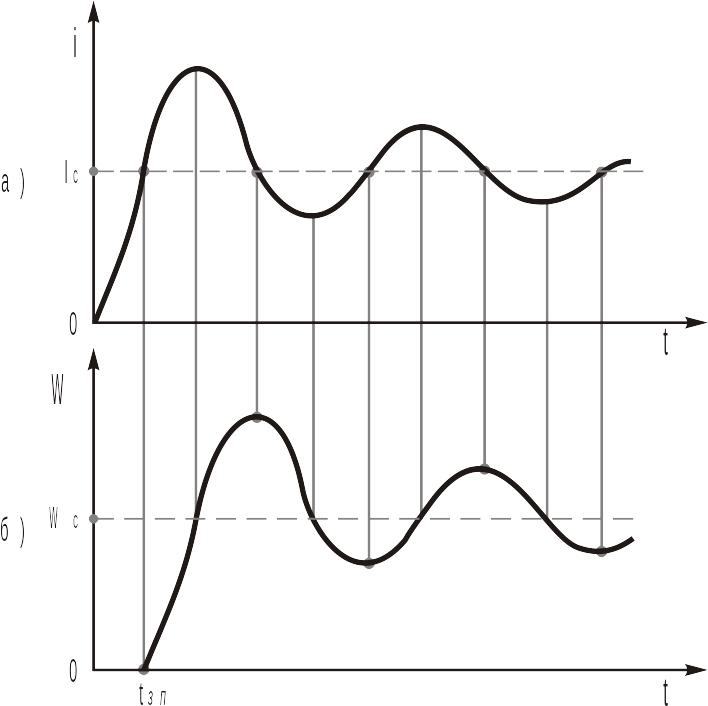
а – крива струму якоря; б – крива кутової швидкості.
Рисунок 5.8 – Змінювання при пуску струму якоря і кутової швидкості при наявності додаткової індуктивності у колі якоря.
Пік пускового струму можна зменшити уведенням до кола якоря реактора (котушки індуктивності), але при цьому процес розгону двигуна може набрати небажаний коливальний характер. При наявності додаткової індуктивності в якірному колі змінювання пускового струму якоря має вигляд поданий на фрагменті а рисунка 5.8, а швидкості – фрагменті б. Затухаючі коливання суттєво збільшують час пуску, виникає значне перерегулювання кутової швидкості й знижується ефективність обмеження піку струму.
Наявність
індуктивності у якірному колі у
перехідних режимах порушує зв’язок
між
та
![]() (цей зв’язок установлюється статичною
механічною характеристикою). Отже
індуктивність у якірному колі у певній
мірі спотворює статичні характеристики
ДПС НЗ у перехідних режимах.
(цей зв’язок установлюється статичною
механічною характеристикою). Отже
індуктивність у якірному колі у певній
мірі спотворює статичні характеристики
ДПС НЗ у перехідних режимах.
38 В чому полягає різниця при розрахунках механічних перехідних процесів в електроприводах з АД і ДПС незалежного збудження?
39 Як графічно визначається електромеханічна постійна часу і час пуску або гальмування?
40 Яка закономірність зміни швидкості, струму, моменту в часі при пуску або гальмуванні електроприводів з ДПС і АД?
41 Які класи ізоляції електричних двигунів існують? Умова вибору потужності електродвигунів?
Допустима температура нагрівання двигуна залежить від теплостійкості його ізоляції, яка поділяється на сім класів: У, А, Е, В, Р, Н і С.
До класу У. належать волокнисті матеріали з бавовни, целюлози і натурального шовку. Найбільша допустима температура їх нагрівання 90°С.
А –допускають температуру нагрівання 105°С.
Клас Е має гранично допустиму температуру нагрівання 120°С.
В – гранично допустима температура нагрівання становить 130°С
Р – допускають температуру нагрівання 155°С.
Я – має гранично допустиму температуру нагрівання 180°С.
Клас С. Гранична допустима температура нагрівання їх не обмежується (понад 180°С).
У електричних двигунах використовують ізоляційні матеріали класу А, Е, В і F. Сучасні двигуни серії 4А виготовляють з ізоляцією класу В і F.
Величина усталеної температури двигуна залежить від навантаження та умов охолодження. Якщо двигун перевантажений, то його усталена температура більша за допустиму для даного класу ізоляції. При роботі з навантаженням, що відповідає номінальній потужності, усталена температура двигуна дорівнює допустимій.
Вибір потужності електродвигунів
Правильний вибір потужності двигуна забезпечує мінімальні капітальні затрати і втрати енергії при експлуатації установки. Двигун заниженої потужності швидко виходить з ладу внаслідок перегрівання або не забезпечує подолання короткочасних перевантажень. Правильно вибраний електродвигун під час роботи повинен бути повністю завантажений (не перевантажений і має дотримуватись перевантажувальна здатність для кожного конкретного типу двигуна в своїх межах), працювати без перегріву, мати достатній пусковий момент для розгону робочої машини і необхідний максимальний момент для подолання короткочасних перевантажень.
Потужність двигуна, який працює в тривалому режимі з постійним навантаженням, визначають з умови:
![]() кВт
(20)
кВт
(20)
де Рн — номінальна потужність двигуна;
Ррозр — розрахункова потрібна потужність на валу робочої машини.
Для багатьох сільськогосподарських машин з тривалим режимом роботи потрібну потужність Рм на валу вказують у паспорті. У цьому випадку розрахункову потрібну потужність робочої машини обчислюють за формулою:
 ;
;
 (для насосів);
(для насосів);
 (у
вентиляторах)
(у
вентиляторах)
де Q –напір; H – (висота) подача; -ККД (насоса, передачі, вентилятора, іт.п.)
42 Яку розмірність має постійна нагріву електродвигуна?
Стала часу нагріву має розмірність часу, тобто обчислюється в секундах.
 – постійна часу нагрівання – час,
протягом якого двигун досягнув би
встановленої температури τу
при
відсутності віддачі тепла в оточуюче
середовище, сек.
– постійна часу нагрівання – час,
протягом якого двигун досягнув би
встановленої температури τу
при
відсутності віддачі тепла в оточуюче
середовище, сек.
 – значення встановленого перевищення
температури двигуна над температурою
навколишнього середовища, град.
– значення встановленого перевищення
температури двигуна над температурою
навколишнього середовища, град.
де Q – кількість тепла, що виділяється в двигуні за одиницю часу, Дж/сек;
A – тепловіддача двигуна, тобто кількість тепла, яка необхідна для підвищення температури на 1 0С, Дж/(сек*град);
C – теплоємність двигуна, тобто кількість тепла, яка необхідна для підвищення температуи на 10С, Дж/град;
43 Що обмежує навантажувальну здатність електродвигунів?
При виборі ЕД у першу чергу слід виходити із наступних двох факторів:
- величина миттєвого перевантаження;
- нагрівання.
Вибір ЕД за перевантаженням полягає у визначенні необхідного номінального момента із величини перевантажувальної здатності двигуна

- перевантажувальна здатність ЕД за моментом.
Використовують також перевантажувальну здатність за струмом
 .
.
Перевантажувальна здатність ДПС суттєво залежить від комутації (тобто перевантаження обмежується допустимим іскрінням на колекторі при перевантаженні). Відомо, що іскріння на колекторі є результат відсутності балансу:
![]() ,
,
де
![]() - е.р.с. секції, що комутується;
- е.р.с. секції, що комутується;
![]() - реактив е.р.с.;
- реактив е.р.с.;
![]() - е.р.с комутації,
що створюється потоком додаткових
полюсів;
- е.р.с комутації,
що створюється потоком додаткових
полюсів;
![]() - трансформаторна
е.р.с яка індукується магнітним потоком
головних полюсів, що міняється.
- трансформаторна
е.р.с яка індукується магнітним потоком
головних полюсів, що міняється.
Величина ДПС тривалого режиму роботи не повинна бути меншою 2,5
![]() .
.
Перевантажувальна
здатність АД обмежується величиною
момента при критичному ковзанні
![]() .
Вона суттєво нижче ніж для ДПС
.
Вона суттєво нижче ніж для ДПС
![]() .
.
З другого боку,
момент АД залежить від
![]() ,
а стандартом допускається зниження
мережної напруги до 90%, тому
для АД слід вважати 0,7 – 0,8 від
заданої при номінальній напрузі.
,
а стандартом допускається зниження
мережної напруги до 90%, тому
для АД слід вважати 0,7 – 0,8 від
заданої при номінальній напрузі.
Перевантажувальна здатність СД найвища і складає =3 – 3,5.
44(2) Накресліть графіки навантаження для тривалого (зі змінним навантаженням), короткочасного і повторно-короткочасного режимів роботи?
Тривалий режим роботи (S1)– це режим роботи електричної машини при незмінному навантажені настільки тривалий, що перевищення температури усіх частин електричної машини досягає усталеного значення.
Графік відносно змінного навантаження приведений на рисунку 1.
Короткочасний
режим роботи
(S2)–це
режим роботи електричної машини при
якому за робочий період при незмінному
навантаженні машина не встигає нагрітися
до усталеної температури
![]() нагрівання, а пауза між вимкненим й
увімкненим станом настільки тривала,
що за цю паузу машина встигне охолонути
до температури навколишнього середовища
нагрівання, а пауза між вимкненим й
увімкненим станом настільки тривала,
що за цю паузу машина встигне охолонути
до температури навколишнього середовища
![]() .
Графік навантаження –рисунок 2.
.
Графік навантаження –рисунок 2.
Повторно–
короткочасний режим роботи (S3).
Тут короткочасні періоди незмінного
номінального навантаження (робочі
періоди) чергуються з періодами
відмикання машини (паузами), причому
ні на одному з робочих періодів
![]() температура нагрівання ЕД не досягає
усталеної температури нагрівання
температура нагрівання ЕД не досягає
усталеної температури нагрівання
![]() ,
а при будь-якій паузі
,
а при будь-якій паузі
![]() двигун не встигає охолонути до температури
навколишнього середовища
.
Графік навантаження – рисунок 3.
двигун не встигає охолонути до температури
навколишнього середовища
.
Графік навантаження – рисунок 3.

Рисунок 1. – Графік навантаження для тривалого РР зі змінним навантаженням
Рисунок 2. – Графік навантаження для короткочасного РР
Рисунок 3. – Графік навантаження для повторно-короткочасного РР
45(40) Запишіть емпіричні формули для визначення потужності для двигуна вентилятора, насоса, компресора, які мають тривалий режим роботи з незмінним графіком навантаження?
Потужність двигуна для насоса (дивись рисунок 6.8) визначається за формулою

![]() ,
,
де
![]() - продуктивність насоса, [
- продуктивність насоса, [![]() ];
];
![]() - розрахункова
висота піднімання води,
- розрахункова
висота піднімання води,
![]() ;
;
![]() - густота води,
- густота води,
![]() ;
;
![]() - к.к.д. насоса
(якщо відцентрований насос, то
- к.к.д. насоса
(якщо відцентрований насос, то
![]() високого тиску,
високого тиску,
![]() низького тиску);
низького тиску);
![]() - к.к.д. передачі
від двигуна до насоса.
- к.к.д. передачі
від двигуна до насоса.
k – коефіцієнт запасу потужності.
Установлена потужність на валу електродвигуна вентилятора P, кВт, визначається за формулою:
де Q
– продуктивність вентилятора, м3/с; Н
– тиск, який створює вентилятор, Па;
![]() –
коефіцієнт корисної дії (ККД) вентилятора;
–
коефіцієнт корисної дії (ККД) вентилятора;
![]() –
ККД передачі; для
клиноремінної передачі =0,95; на одному
валу з електродвигуном = 1; kз
– коефіцієнт запасу, який береться в
межах 1,1–1,5.
–
ККД передачі; для
клиноремінної передачі =0,95; на одному
валу з електродвигуном = 1; kз
– коефіцієнт запасу, який береться в
межах 1,1–1,5.
Потужність двигуна поршневого компресора визначається по формулі:
kз – коефіцієнт запасу = 1,05 ÷ 1,15;
Q – продуктивність, м3/с;
А – адіабатична робота стиснення 1м3 повітря від атмосферного тиску Р1=1,01·105 Па до необхідного Р2. А визначається за спеціальними таблицями.
ηк – ККД компресора, (0,6 ÷ 0,8);
ηп – ККД передачі, (0,9 ÷ 0,95).
46(2,12,13,31) Запишіть формули для визначення середніх втрат і середньоквадратичних еквівалентних величин: струму, моменту, потужності. В яких випадках ці формули застосовують?
Середні втрати відповідно струму, моменту, потужності:
 ;
;
 ;
;
 .
.
Середньоквадратичні еквівалентні величини відповідно струму, моменту, потужності:
 ;
;
 ;
;
 .
.
де
![]() ,
,![]() ,
,![]() - втрати струму, моменту, потужності на
- втрати струму, моменту, потужності на
![]() -му
– інтервалі;
-му
– інтервалі;
![]() ,
,![]() ,
,![]() - потужність, сила струму, момент на
- потужність, сила струму, момент на
![]() -му
– інтервалі;
-му
– інтервалі;
![]() - тривалість
-го
– інтервалу;
- тривалість
-го
– інтервалу;
![]() - число інтервалів
у циклі;
- число інтервалів
у циклі;
![]() - час
На практиці розрахунок потужності
двигуна при тривалому режимові роботи
здійснюють менш точними, ніж побудова
кривих нагрівання, методами, але більш
простими. Їх у основному два, це:- метод
середніх втрат;-метод еквівалентного
струму.При умовах коли відомий графік
споживання струму за цикл потужність
двигуна для цього можна вибрати
використавши метод еквівалентного
струму.
- час
На практиці розрахунок потужності
двигуна при тривалому режимові роботи
здійснюють менш точними, ніж побудова
кривих нагрівання, методами, але більш
простими. Їх у основному два, це:- метод
середніх втрат;-метод еквівалентного
струму.При умовах коли відомий графік
споживання струму за цикл потужність
двигуна для цього можна вибрати
використавши метод еквівалентного
струму.
Бувають випадки коли відомий не графік змінювання струму навантаження, а графіки момента або потужності, які створює двигун. У цьому випадку слід користуватись методом екв. момента й методом екв. потужності відповідно.
Метод еквівалентних величин застосовувати для будь-яких типів двигунів можна застосовувати тільки після детального аналізу їх застосування.
Так метод
еквівалентного струму
неможливо застосувати для АД з
глибокопазною короткозамкненою кліткою
та двокліткового ротора, оскільки у
них
![]() (функція
ковзання s).
(функція
ковзання s).
Метод
еквівалентного момента
може бути застосований для тих двигунів
у яких працює метод еквівалентного
струму, оскільки
![]() ,
а таке співвідношення мають ДПС НЗ та
звичайні АД. За цих же умов ці методи
неможливо використовувати для ДПС ПЗ,
оскільки у них
,
а таке співвідношення мають ДПС НЗ та
звичайні АД. За цих же умов ці методи
неможливо використовувати для ДПС ПЗ,
оскільки у них
![]()
![]() .
.
Метод
еквівалентної потужності можна
застосовувати
для двигунів, у яких
![]() ,
а це значить, що
,
а це значить, що
![]() ,
,
![]() ,
,
![]() та
та
![]() отже, можна використовувати для СД, АД
та для ДПС НЗ, коли вони працюють з
номінальним потоком й незмінною та
майже незмінною швидкістю.
отже, можна використовувати для СД, АД
та для ДПС НЗ, коли вони працюють з
номінальним потоком й незмінною та
майже незмінною швидкістю.
Метод еквівалентної
потужності неможливо застосовувати
для двигунів у яких змінюється швидкість,
оскільки при
![]() будуть
будуть
![]() .
.
У всіх названих випадках де не працює метод еквівалентних величин двигун на нагрівання слід перевіряти методом середніх втрат. циклу.
47 Як визначається коефіцієнт теплового перевантаження двигуна? Коли його застосовують?
Коефіцієнт теплового перевантаження застосовують для вибору потужності двигуна (або обернена задача – знаходження допустимого часу роботи двигуна) при короткочасному режимі роботи двигуна.
Короткочасний режим роботи (S2)–це режим роботи електричної машини при якому за робочий період при незмінному навантаженні машина не встигає нагрітися до усталеної температури нагрівання, а пауза між вимкненим й увімкненим станом настільки тривала, що за цю паузу машина встигне охолонути до температури навколишнього середовища .
Коефіцієнт теплового перевантаження – це відношення втрат в короткочасному режимі до номінальних втрат при умові однакової температури:

При короткочасному режимі роботи двигун може бути більше завантажений ніж у тривалому режимі і забезпечує більшу перевантажувальну здатність.
48 Яким чином робиться перерахунок потужності електродвигуна, коли розрахункове значення ТВрозр% відрізняється від стандартного ТВстанд%?
Повторно– короткочасний режим роботи (S3). Тут короткочасні періоди незмінного номінального навантаження (робочі періоди) чергуються з періодами відмикання машини (паузами), причому ні на одному з робочих періодів температура нагрівання ЕД не досягає усталеної температури нагрівання , а при будь-якій паузі двигун не встигає охолонути до температури навколишнього середовища .
Повторно-короткочасний номінальний режим роботи характеризується відносною тривалістю вмикання
 ,
,
де
![]() - розрахункова тривалість вмикання;
- розрахункова тривалість вмикання;
![]() - час циклу;
- час циклу;
![]() - час увімкнутого
стану (роботи);
- час увімкнутого
стану (роботи);
- час паузи.
Значення ТВ нормується: ТВ =15; 25; 40; 60 (%)
Для багатоступеневого графіка повторно-короткочасного режиму роботи визначають еквівалентну (розрахункову) потужність:

Дане значення
![]() зводиться до стандартного значення
ТВстанд. При переході від однієї ТВ до
іншої еквівалентна потужність двигуна,
на яку він вибирається, повинна
залишатись незмінною.
зводиться до стандартного значення
ТВстанд. При переході від однієї ТВ до
іншої еквівалентна потужність двигуна,
на яку він вибирається, повинна
залишатись незмінною.
Перерахунок здійснюється за формулами:

49 Як визначити розрахункову тривалість ввімкнення ТВрозр?
Повторно– короткочасний режим роботи (S3). Тут короткочасні періоди незмінного номінального навантаження (робочі періоди) чергуються з періодами відмикання машини (паузами), причому ні на одному з робочих періодів температура нагрівання ЕД не досягає усталеної температури нагрівання , а при будь-якій паузі двигун не встигає охолонути до температури навколишнього середовища .
Повторно-короткочасний номінальний режим роботи характеризується відносною тривалістю вмикання
,
де - розрахункова тривалість вмикання;
- час циклу;
- час увімкнутого стану (роботи);
- час паузи.
Значення ТВ нормується: ТВ =15; 25; 40; 60 (%)
50(9?)Надайте короткий перелік елементів систем автоматизованого керування електроприводами.
Керуванням електроприводом називають ціленаправлену дію на електропривід з метою виконання робочою машиною заданого технологічного процесу з необхідною якістю і точністю, мінімальними затратами енергії і часу, обмеженими прискореннями і ін.
Якщо основні функції керування виконуються без безпосередньої участі людини
( оператора ), то керування називають автоматичним, а електропривід - автоматизованим. Сукупність технічних засобів, які забезпечують таке керування, утворюють автоматичний керуючий пристрій. Роль оператора в даному випадку може бути зведена до подачі лише першого командного сигналу на автоматичне виконання того чи іншого режиму роботи електроприводу і до спостереження за цим режимом.
Перша |
Група видів елементів |
Буквенн |
Види елементів |
буква |
|
ий код |
|
коду |
|
|
|
F |
Запобіжник |
FU |
Запобіжник плавкий |
G |
Генератори |
G |
Генератор живлення |
|
|
GE |
Збуджувач генератора |
Н |
Пристрої сигнальні |
НІ. |
Сигнальна лампа |
|
|
HLO |
Сигнальна лампа з зеленою лінзою |
|
|
HLR |
Синильна лампа зчервоною лінзою |
|
|
HLW |
Сигнальна лампа з білою лінзою |
К |
Реле, контактори, пускачі |
КА |
Реле струмове |
|
|
КН |
Реле вказівне |
|
|
KK |
Реле електротеплове |
|
|
KM |
Контактор, магнітний пускач |
|
|
KT |
Реле часу |
|
|
KV |
Реле напруги |
|
|
KL |
Реле проміжне |
L |
Обмотки, котушки |
LG |
Обмотка збудження генератора |
|
|
LM |
Обмотка збудження електродвигуна |
Q |
Вимикачі в силових колах |
QF |
Вимикач автоматичний |
S |
Пристрої комутаційні в |
SA |
Вимикач або перемикач |
|
колах керування і |
SF |
Вимикач автоматичний |
|
сигналізації |
SB |
Вимикач кнопковий |
T |
Трансформатори |
ТА |
Трансформатор струму |
|
|
TV |
Трансформатор напруги |
U |
Перетворювачі |
UD |
Переворювач випрямляючий |
|
|
UG |
Блок живлення |
|
|
UF |
Перетворювач частоти |
V |
Пристрої напівпровідникові |
VP VS |
Діод, стабілітрон Тиристор |
|
|
VT |
Транзистор |
|
|
|
|
51(7,6) Які функції виконують:магнітний пускач, автоматичний вимикач, реле часу, контактори та інші?
Контактор–це двопозиційний електричний апарат, призначений для частих вмикань і вимикань силових електричних кіл напругою до 1000 В при номінальних режимах роботи.
Шляхові вимикачі і перемикачі призначені для перемикання в колах керування залежно від просторового положення робочого органу машини або керованого чи захисного механізму. Якщо такі апарати використовуються для перемикання електричних кіл при крайніх положеннях, то їх називають кінцевими вимикачами.
Електромагнітним пускачем називається комутаційний апарат, призначений для вмикання трифазних асинхронних електродвигунів при напрузі до 660 В змінного струму частотою 50,60 Гц.
Реле – це електричний апарат, в якому при плавній зміні вихідного керуючого параметра до певно наперед заданої величини відбувається стрибкоподібна зміна вихідного (керованого) параметра. Хоча один з цих елементів повинен бути електричним.
Існує різноманітна класифікація реле, серед яких є реле часу.
Реле часу використовується коли потрібна витримка часу між спрацюванням двох або декількох апаратів , або створення певної часової послідовності операцій в системах захисту і автоматики.
Автоматичний вимикач – призначений для автоматизованого вимикання електричних кіл при анормальних і аварійних режимах; коротких замиканнях, перевантаженнях, надмірному зниженні напруги іт.д., а також нечастих вмикань і вимикань вручну номінальних струмів навантаження.
52 Для чого потрібна в схемах автоматизованого керування електроприводами електричне і механічне блокування? Як воно виконується?
Електричні й механічні блокувальні пристрої застосовують в електроустановках, де небезпека дотику до струмоведучих частин велика. Також можливе проникнення сторонніх осіб на електроустановку, що знаходиться під високою напругою.
Електричне блокування здійснює розрив мережі контактами, що встановлені на дверях огороджувальних пристроїв, кришках і дверцятах кожухів і т.п.
За допомогою блокувальних контактів електричне блокування здійснює відімкнення напруги під час відчинення дверей огороджувальних пристроїв.
Електричне блокування має забезпечувати відімкнення напруги за такого розчинення дверей, щоб людина не змогла потрапити за огородження до струмопровідних частин безпосередньо сама або за допомогою інструмента.
При електричному блокуванні ланцюг живлення високої напруги розривається, і електроустановка вимикається, коли відчиняються, наприклад, двері, або знімається захисний кожух чи відкривається панель випробувального стенда, на якому встановлюють нормально замкнуті електричні контакти при зачинених дверях і встановлених кожухах. Якщо електроустановка включається в мережу за допомогою магнітного пускача чи контактора, то доцільно ланцюг живлення обмотки керування магнітного пускача чи контактора підводити через блокувальні контакти.
Механічне блокування використовують в електричних апаратах (рубильниках, автоматах).
Механічне блокування виконується за допомогою замків, стопорів, защіпок та інших механічних пристроїв, які стопорять поворотну частину механізму у відімкненому стані.
Механічне блокування не дозволяє відкрити двері електроустановки, не вимкнувши рубильник чи пускач. При вимиканні рубильника механічне блокування замикального пристрою знімається.
(9,13,31)Номінальне і критичне ковзання
М'яка характеристика у двигунах, в яких при невеликому збільшенні навантаження на валу значно зменшується частота обертання (електродвигуни постійного струму послідовного збудження) .
Розглянемо детальніше механічні характеристики асинхронних електродвигунів.
Рівняння обертаючого моменту асинхронного двигуна має вигляд:
 (1)
(1)
де М — обертаючий момент на валу двигуна, Нм;
Ммакс — максимальний момент двигуна, Нм;
Sk — критичне ковзання (ковзання при максимальному моменті на валу двигуна) ;
S — ковзання;
q— коефіцієнт.
Величина ковзання S показує, наскільки ротор відстає від частоти обертання магнітного поля статора:
![]() (2)
(2)
де n — частота обертання ротора, об/хв;
n0 — частота обертання магнітного поля статора, об/хв;
![]() об./хв.
(3)
об./хв.
(3)
тут f — частота струму (f=50 Гц) ;
р — число пар лолюсів.
Ковзання при роботі електродвигуна у двигунному режимі змінюється від одиниці (при нерухомому роторі) до нуля (коли ротор обертається синхронно з магнітним полем статора).
Значення Ммакс, Sk і д з формулами (1) можна визначити за каталожними даними двигуна:
Ммакc=![]() (4)
(4)
Де ![]() —
кратність максимального моменту;
—
кратність максимального моменту;
Мн — номінальний момент двигуна:
![]() (5)
(5)
тут Рн — номінальна потужність, кВт;
nн — номінальна частота обертання, об/хв.
Критичне ковзання обчислюють за формулою:
 (6)
(6)
 (7)
(7)
де Sн
— номінальне ковзання двигуна  ;
;
![]() —
відношення
кратностей максимального і
—
відношення
кратностей максимального і
пускового моментів;
тут
Кп = ![]() —
кратність пускового моменту (наводиться
в каталозі).
—
кратність пускового моменту (наводиться
в каталозі).
Для механічної характеристики асинхронного двигуна (рис. 21) є такі характерні точки:
А (S=0, М=0) синхронного холостого ходу (частота обертання ротора дорівнює частоті обертання магнітного поля статора) ;
'В (S=SН, М=МН)-номінального режиму роботи;
С (5=5к,М = ММакс) —
максимального моменту;
Д S = 1, М=0) —характеризує значення моменту двигуна на початку пуску.
Вид механічної характеристики і відповідно величина пускового Мп і максимального Ммакс моментів, критичного ковзання 5К, пускового струму ^п, коефіцієнта корисної дїі (ККД) і коефіцієнта потужності (соs φ) залежить від конструкції ротора двигуна.