

Конспект по фильтрации
.pdfМальцева Н. В. Рекуррентная и адаптивная фильтрация 21
Пример 2. Пусть дана стационарная скалярная система:
xk = xk−1 + wk y = xk + vk ,
ãäå wk è vk стационарные белые последовательности с нулевым средним и дисперсиями q = 25 и r = 15 соответственно.
Пусть начальная оценка дисперсией P0 = 100. Тогда
P (k|k − 1) = |
Pk−1 + 25 ; |
|
èç (2.3) |
(прогноз P ) |
||
Kk = (Pk−1 + 25)/(Pk−1 + 40) ; |
èç (2.4) |
(коэффициент усиления) |
||||
Pk = |
15(pk−1 + 25) |
= 15 · Kk ; |
èç (2.5) |
|
||
|
(pk−1 + 40) |
|
|
|
||
{Pk = r(pk−1 + q)/(pk−1 + q + r)}
Начиная с Pk−1 = P0 = 100, сравнительно просто вычислить P (k|k − 1), Pk è Kk äëÿ k = 1, 2, . . . Результаты нескольких первых вычислительных циклов сведены в таблицу 1.
k |
P (k|k − 1) |
Kk |
Pk |
0 |
− |
− |
100 |
1 |
125 |
0.893 |
13.40 |
2 |
38.4 |
0.720 |
10.80 |
3 |
35.8 |
0.704 |
10.57 |
4 |
35.6 |
0.703 |
10.55 |
|
|
|
|
Таблица 1: Практическая таблица
Теоретически рассчитанное установившееся значение Pk можно получить, подставляя значение Pk = Pk−1 = P в последнее из тр¼х привед¼нных соотношений:
P = 15(P + 25) P 2 + 40P = 15P + 375 P 2 + 25P − 375 = 0 .
P + 40
Поскольку P дисперсия = единственный корень P = 10.55 = из таблицы 1 видно,
что фильтр находится в установившемся состоянии в пределах имеющейся точности уже после обработки 4-х измерений. Это означает, что уравнение фильтра
xˆk = xˆk−1 + 0.703(yk − xˆk−1) = 0.297ˆxk−1 + 0.703yk
находится в установившемся состоянии для k = 4, 5, . . .
Пример 3. Рассмотрим линейную дискретную систему вида:
(
Xk+1 = ΦkXk
t = const.
Yk = HkXk + ξk ,

Мальцева Н. В. Рекуррентная и адаптивная фильтрация |
|
|
|
|
|
22 |
||||||||||
Пусть xk R2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
à) Xk = (xk, x˙ k) |
á) Xk = (x0, x˙ 0) |
|
|
|
|
|
|
|
|
|
||||||
Φk |
= 0 1t |
Φk = 0 1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
= x0 |
+ x˙ 0 |
|
|
|
|
|
|
|
|
|||
|
|
|
y1 |
= x0 |
|
|
|
|
|
|
|
|
|
|
||
H |
|
= (1 0) |
y |
3 |
= x |
0 |
+ 2Δtx˙ |
0 |
|
|
|
H |
|
= (1 (k 1)Δt) |
||
k |
|
|
|
|
|
|
|
k |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y . |
= x |
0 |
+ (k 1)Δtx˙ |
0 |
|
|
|
|
|
|
|||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Хотим построить оценку на текущий момент времени tk = надо воспользоваться подхо дом б).
Для простоты вычислений оценку Qk получим, заменив систему а) ей эквивалентная:
[t1, . . . , tk] |
yk = xk |
Xk = (xk, x˙ k) |
{y1, . . . , yk} |
yk−1 = xk − tx˙ k |
|
|
yk−2 = xk − 2Δtx˙ k |
|
...
yk−(k−1) = xk − (k − 1)Δtx˙ k
| {z }
y1
Hk = (1 − (k − 1)Δt) = далее применяем МНК.
Единичной матрицей обычно стараются делать либо Φk, ëèáî Hk.
Для простоты вычислений рассмотрим систему б), т. е. фильтрацию параметров. Вос пользуемся в этой постановке формулами метода наименьших квадратов (МНК), которые
для данного класса задач обеспечивают построение требуемых оценок. Итак, Pn = σ2 · Qn, ãäå Qn = (HnTHk)−1
1 |
−0 t |
|
|
1 |
1 . . . |
||||
|
1 |
|
|
|
|
|
|
|
|
Hn = 1. |
−2Δ. |
t |
|
Qn−1 = HnTHn = |
0 |
t |
|
2Δt . . . |
|
|
. |
. |
|
|
|
|
− |
− |
|
. |
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
(k 1)Δt |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
− − |
|
|
|
|
|
|
|
1 |
|
− t |
||
1 |
|
|
0 |
|
1. |
|
−2Δ. |
t |
|
.. |
|
|
.. |
|
|
|
|
|
|
|
|
|
n(n 1) |
|
1 |
|
t |
2− |
|
|
− |
|
|
|
|
n |
|
(k |
1 |
1)Δt (1 |
− (k − 1)Δt) = |
|
|
|
|
|
|
|
|
|
|
= k=1 |
− |
|
|
|
|
|
|
|
|
|||||
|
X |
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
(k |
1)Δt |
(k 1)2 t2 |
|
|
tn(n−1) |
t2 |
(n−1)(n−2)n ! |
||||
|
k=1 |
|
|
||||||||||||
|
|
1 |
−(k − 1)Δt |
|
|
|
− |
t |
n(n−1) |
||||||
|
|
|
2 |
6 |
|
|
|||||||||
|
= |
|
|
|
= |
|
n |
2 |
|
|
|||||
|
X − |
|
− |
− |
|
− |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||

Мальцева Н. В. Рекуррентная и адаптивная фильтрация |
|
|
|
|
|
|
|
23 |
|||||||||||||||||||||||||||||||||
det Q |
n |
= |
t2n(n − 1)(n − 1) |
− |
|
|
|
t2n2(n − 1)2 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
6 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
t2n2(n − 1)[4n − 2 − 3n + 3] |
= |
|
t2n2(n − 1)(n + 1) |
; |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
= |
|
Q11 |
= |
|
|
|
t2(n − 1)n(2n − 1) · 12 |
= |
2(2n − 1) |
|
; |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n(n + 1) |
|
||||||||||||||||||||||||
|
|
|
|
|
n |
|
|
|
|
|
6Δt2n2(n − 1)(n + 1) |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
Qn22 = |
|
|
|
|
|
n · 12 |
|
|
|
|
= |
|
|
|
12 |
|
|
; |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
t2n2(n2 |
|
|
|
|
|
t2n(n2 − 1) |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
− 1) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
Qn12 = |
|
|
|
|
|
t · n(n − 1) · 12 |
|
= |
6 |
|
|
|
|
; |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Èòàê, |
|
|
|
|
|
|
|
|
2Δt2n2(n − 1)(n + 1) |
|
|
tn(n + 1) |
|
|
|||||||||||||||||||||||||||
|
|
|
Pn = σ |
· " |
|
|
tn(6n+1) |
2 12 |
2 |
|
|
|
|
# = |
|
σ212 |
|
σ222 . |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2(2n−1) |
|
|
|
|
6 |
|
|
|
|
|
|
def |
|
σ2 |
|
σ2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t n(n −1) |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
n(n+1) |
|
|
|
|
|
|
|
|
|
12 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
tn(n+1) |
|
|
|
|
11 |
|
|
|
|
|
|
|
||||||||||||||||
Найд¼м вид коэффициентов усиления Kn |
= |
Kx˙ n+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kxn+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
K |
n+1 |
= P (n + 1 |
| |
n)HT (H |
n+1 |
P (n + 1 |
| |
n)HT |
|
+ σ2)−1 . |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n+1 |
|
|
|
|
|
|
|
|
|
|
|
|
n+1 |
|
|
|
|
|
|
|
||||||||
С этого момента начн¼м фильтровать текущий вектор, т. е. вектор, задаваемый соотноше
íèåì (à) (xk, x˙ k) è Hk = (1 |
0)T соответственно. |
|
|
|
|
|
||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
1 |
t |
σ2 |
σ2 |
1 |
0 |
|
σ2 |
+ 2Δtσ2 + t2σ2 |
σ2 + tσ2 |
||||
0 |
1 |
σ212 |
σ222 |
t |
1 |
11 |
σ122 + tσ222 |
22 |
σ222 |
|
||||
P (n + 1 n) = |
|
|
11 |
12 |
|
|
|
= |
12 |
12 |
22 . |
|||
Подставим значения σ11, σ12, σ22 в уравнение
σ112
Èòàê,
+ 2Δtσ2 + |
t2σ2 |
= |
|
2(2n − 1) |
+ |
|
|
2Δt · 6 |
|
|
+ |
|
t · 12 |
|
= |
··· |
= |
2(2n + 1) |
; |
|||||||||||||
|
n(n + 1) |
|
|
tn(n + 1) |
|
|
|
|
n(n − 1) |
|||||||||||||||||||||||
12 |
22 |
|
|
|
|
|
|
|
|
|
|
t2n(n2 − 1) |
|
|
|
|
|
|||||||||||||||
σ122 + tσ222 |
= |
|
|
6 |
|
|
|
+ |
|
|
12Δt |
|
|
= ··· = |
|
|
|
6 |
|
|
|
|
; |
|
|
|||||||
|
tn(n + 1) |
|
t2n(n2 − 1) |
|
tn(n − 1) |
|
|
|||||||||||||||||||||||||
P (n + 1 n) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
6− |
|
|
|
|
|
|
12 − |
|
|
|
σ , |
Kn+1 |
|
σ122 |
|
|
|
||||||||||||
| |
|
|
|
|
t n(n−1) |
|
t2n(n2−1) ! |
· |
|
|
|
|
|
|
σ112 |
+σ2 |
|
|
||||||||||||||
|
|
|
|
2(2n+1) |
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
σ112 |
|
|
|
|
|
||||||
|
|
|
|
n(n 1) |
|
|
t n(n 1) |
|
|
2 |
|
|
|
|
|
σ112 +σ2 |
|
|
|
|
||||||||||||
Тогда
Kn+1 =
Èòàê, оценка xk è x˙ k
6− |
. 2(2n+1) |
= |
|
= |
|
6 |
. |
|||
2(2n+1) |
|
2(2n+1) |
|
+ 1 |
··· |
|
|
t(n+1)(n+2) |
! |
|
t·n(n−1) |
. n(n−1) |
|
|
|
||||||
|
|
|
|
+ 1 |
|
|
|
2(2n+1) |
|
|
n(n 1) |
|
n(n−1) |
|
|
|
(n+1)(n+2) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
может быть построена по следующим формулам:
|
k |
k−1 |
|
|
k−1 |
|
k(k + 1) |
k |
− |
|
k−1 − |
|
k−1 |
|
||
|
x |
= x |
+ x˙ |
|
t + |
2(2k − 1) |
yèçì. |
|
x |
|
x˙ |
|
t |
|||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
6 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
èçì |
|
|
|
|
|
t |
|
|
|
= x˙ k−1 + |
|
|
|
|
− xk−1 |
− x˙ k−1 |
|
||||||||
x˙ k |
t · k(k + 2) yk |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cov Xk = |
|
2(2k−1) |
|
6 |
|
||
k(k+1) |
t k(k+1) |
||||||
6 |
|
|
|
12 |
|
||
|
|
t k(k+1) |
t2k(k2−1) |
||||
!
, ãäå Xk = |
x˙ k |
|
xk |
= поведение cov Xk è Kk с увеличением k, зависимость от t.
Мальцева Н. В. |
Рекуррентная и адаптивная фильтрация |
24 |
Пример 4. Рассмотрим тр¼хмерную дискретную систему, т. е.
x˙ k |
= x˙ k−1 |
+ x¨k−1 |
t |
− |
|
||
|
xk |
= xk 1 |
+ x˙ k 1 |
t + x¨k |
1 |
||
|
|
− |
− |
|
|
|
|
x¨ |
k |
= x¨ |
|
|
|
|
|
|
|
k−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
t2/2 |
Φk = |
0 |
1t |
t |
2 |
|
t/2 |
||||||
|
|
1 |
|
|
|
|
= |
|
0 |
0 |
1 |
||
Hk = (1 0 0)
|
|
σ2 |
= |
3(3n2 − 3n + 2) |
σ2 |
|
|
|
|
|||||||||||
|
n(n + 1)(n + 2) |
|
|
|
|
|||||||||||||||
|
x1 |
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
12(2n 1)(8n |
|
11) |
|
2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σx2 |
= |
|
2 |
|
|
− |
|
2 |
|
|
|
− |
|
2 |
σ |
|
||
|
|
|
|
(n |
|
|
4)(n |
|
|
1)n |
t |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
− |
|
|
|
|
|
|
|
||
|
|
σx23 = |
|
|
|
|
|
|
720 |
|
|
|
|
|
4 σ2 |
|||||
|
|
|
|
n(n |
|
|
|
4)(n |
|
|
|
1)Δt |
|
|
|
|||||
|
|
|
|
|
|
|
− |
|
|
|
|
− |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
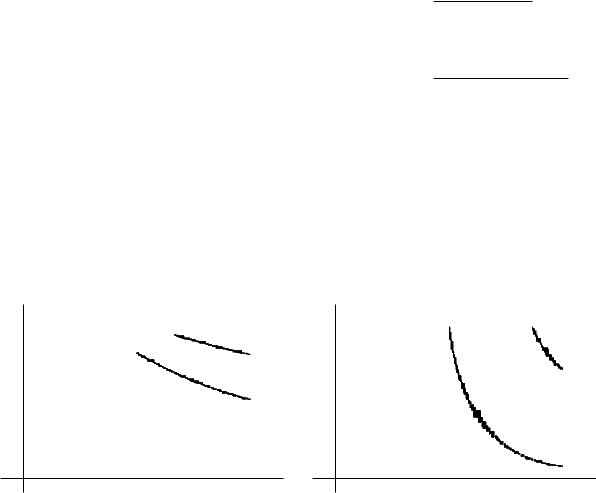
Сравним точности оценивания для 2-х и 3-х мерной модели (в разах от σ2)
|
2-x ìåð. |
3-x ìåð. |
||
|
x1 |
x2 |
x1 |
x2 |
n = 1 |
1 |
− |
1 |
− |
n = 2 |
1 |
6 |
1 |
− |
n = 3 |
0.83 |
1 |
1 |
6.5 |
n = 4 |
0.7 |
0.33 |
0.95 |
2.45 |
n = 5 |
0.6 |
0.15 |
0.88 |
1.24 |
n = 6 |
0.52 |
0.08 |
0.82 |
0.72 |
|
|
|
|
|
1 |
6σx1 |
|
|
q |
3-x ìåð. |
|
1 |
6σx2 |
|
q |
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
q |
q |
q |
q |
|
|
|
|
|
|
3-x qìåð. |
|
0.5 |
|
|
2-x ìåð. |
q |
q |
0.5 |
|
|
|
|
|
|||
|
|
|
|
|
|
q |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
-n |
|
|
|
2-x ìåð. |
q |
-n |
||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
= Выводы:
1)на небольших участках наблюдения траекторию целесообразно приближать полино мом 1-й степени (существенно выше точность, а не динамические ошибки ещ¼ не успеют сказаться);
2)видно, что теряем на загрубении модели.
Найд¼м другой вид оценок двумерной системы, при котором оценки xk è x˙ k могут быть записаны в виде линейных функций от {yièçì.} с соответствующими весовыми коэффици
ентами.

Мальцева Н. В. Рекуррентная и адаптивная фильтрация |
|
|
|
25 |
|||||||||||||||||||||||
Пример 5. Рассмотрим систему |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
( yk |
|
= HkXk + ξk |
|
|
|
|
|
Hk |
= (1 |
(k |
|
|
|
1)Δt) |
|||||||||||||
X |
k |
= X |
k−1 |
|
|
|
|
, |
|
|
|
X |
|
= (x |
|
x˙ |
|
)T |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
0 |
|
0 |
|
|
||||||
èçì. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пусть t = const = |
|
|
èçì. |
= x0 |
|
+ x˙ 0(k − 1)Δt + ξk . |
|
|
|
|
|||||||||||||||||
|
|
yk |
|
|
|
|
|
|
|
||||||||||||||||||
По МНК следует минимизировать функционал |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jn = |
|
Xi |
|
|
|
− x0 − x˙ 0(i − 1)Δt) |
|
|
|
|||||||||||||||||
|
|
|
|
èçì. |
2 |
|
|||||||||||||||||||||
|
|
|
|
(yi |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= система уравнений, подлежащая решению, будет следующая |
|||||||||||||||||||||||||||
|
|
|
|
|
|
n |
|
(yi |
|
|
|
− x0 − x˙ 0(i − 1)Δt) = 0 |
|||||||||||||||
|
|
|
|
|
i=1 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
n |
|
|
|
|
|
|
|
èçì. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(yèçì |
. |
|
|
x |
|
x˙ (i |
|
1)Δt)(i |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1)Δt = 0 |
|||||||||||||||||||||
Xi |
|
i |
|
|
− 0 − 0 |
|
|
− |
|
|
|
|
|
− |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решая эту систему относительно x0 è x˙ 0, можно получить: |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = |
n |
|
|
4n + 4 − 6i |
|
yèçì. |
|
|
|
|
|
|||||||||||||
|
|
|
Xi |
|
· |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
0 |
|
|
|
n(n + 1) |
|
i |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x˙ |
= |
n |
|
|
12i − 6n − 6 |
|
yèçì. |
|
|
|
|
|
||||||||||||
|
|
|
Xi |
|
|
· |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
t n(n2 |
− |
1) |
i |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На текущий момент времени имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
x = |
n |
4n + 4 − 6i |
|
|
yèçì. = |
|
n |
a (i) yèçì. |
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
n |
Xi |
|
|
|
n(n + 1) |
|
· i |
|
|
|
X |
n |
|
· i |
|||||||||||||
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
||
x˙ = |
n |
|
12i − 6n − 6 |
|
yèçì. = |
|
n |
b (i) yèçì. |
|||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
n |
Xi |
|
|
|
t n(n2 |
− |
1) · i |
|
|
|
X |
|
|
|
· i |
||||||||||||
|
=1 |
|
|
|
|
|
|
|
|
|
i=1 |
n |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Небольшое отступление |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример 6. Рассмотрим одномерную систему: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
( yk |
= xk + ξk . |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
xk |
= xk−1 |
|
|
|
|
|
|
|
|
|
|
||||||||
Оценивая xk с постоянным коэффициентом α по формулам фильтра Калмана, имеем:
xk = xk−1 + α(yk − xk−1) |
|
0 < α < 1 |
||
|
k |
|
k |
|
xk |
Xi |
X |
|
|
= |
α(1 − α)iyk−i = |
ηi yk−i |
x0 = 0 |
|
|
=0 |
|
i=0 |
|
ηi весовая функция, ηi = α(1 − α)i имеет вид экспоненты

Мальцева Н. В. Рекуррентная и адаптивная фильтрация |
26 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α = 0.9 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
@ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
@ |
|
|
|
|
|
|
|
|
0.5 |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R@ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α = 0.5 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
α = 0.1 |
@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
@ |
|
|
@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
@ |
@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
||||||||||
|
|
|
|
R@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yk−4 ←− yk−3 ←− yk−2 ←− yk−1 ←− |
|
yk |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
10 Фильтрация сигналов в нелинейных системах
Во многих практически важных случаях физические системы и взаимосвязь измеряе мых параметров с оцениваемыми нельзя описать линейными уравнениями или линейными рекуррентными соотношениями, для этой цели следует использовать системы нелинейных уравнений èëè нелинейных рекуррентных соотношений .
Решение задачи фильтрации в случае нелинейных моделей состояния и измерения мо жет быть получено, например, с использованием теории условных марковских процес сов, разработанной Стратановичем. Эта теория характеризуется математической строго стью методов, базируется на аппарате многомерных плотностей распределения вероятно стей и байесовском подходе . Получающееся при этом точное решение оказывается слишком сложным в вычислительном отношении для того, чтобы его можно было использовать при обработке сигналов в реальном масштабе времени. Точные алгоритмы нелинейной фильтра ции, представляющиеся в общем случае бесконечномерными цепочками уравнений , подвер гаются различным аппроксимациям с целью получения конечномерных вычислительных алгоритмов, реализация которых на ЭВМ не составляет проблемы.
Получающиеся при этом алгоритмы нелинейного оценивания могут быть также выведе ны пут¼м эвристического обобщения на нелинейный случай алгоритма линейного фильтра Калмана. Это обобщение выполняется на основе линеаризации нелинейных моделей с помо щью разложения нелинейных зависимостей в ряды Тейлора. В разложениях, как правило, используется только члены первого порядка и лишь иногда ещ¼ и члены второго поряд ка (фильтр второго порядка). Именно таким способом мы и получим простые алгоритмы фильтрации.
Дискретный линеаризованный фильтр Калмана
Особенность данного подхода заключается в том, что предполагается известной опор ная траектория, т. е. значение оцениваемых параметров для любого момента времени, достаточно близкие к истинным.
Äàíî:
1. |
Модель системы: |
|
|
xk+1 = f(xk) + b(xk)wk ; |
(10.1) |
2. |
Модель измерений: |
|
|
yk+1 = h(xk+1) + B(xk+1)vk+1 ; |
(10.2) |
Мальцева Н. В. |
Рекуррентная и адаптивная фильтрация |
27 |
||||
3. |
Априорная информация: |
|
|
|
|
|
|
|
x0 N(¯x0, P0) ; |
wk N(0, Qk) ; |
vk N(0, Rk) ; |
(10.3) |
|
|
|
cov(wk, wj) = Qkδkj ; |
cov(vk, vj) = Rkδkj ; |
|
||
|
|
cov(wk, vj) = cov(x0, wk) = cov(x0, vk) = 0 |
|
|||
4. |
Выборка измерений: |
|
|
|
|
|
|
|
Y1k = {ys : s = 1, . . . , k}; |
|
|||
5. |
Опорная траектория: |
|
|
|
|
|
|
|
xn |
= f(xn) ; |
xn |
= x¯0 ; |
(10.4) |
|
|
k+1 |
k |
0 |
|
|
6.Аппроксимирующие предложения:
Функции f(xk), b(xk), h(xk+1), B(xk+1) раскладываются в ряды Тейлора соответ ственно в окрестности точек xnk è xnk+1;
Пренебречь значениями (xk − xnk )wk, (xk+1 − xnk+1)vk+1, o(xk − xnk ), o(xk+1 − xnk+1) и статистическими моментами третьего и выше порядка;
o(·) бесконечно малая величина относительно своего аргумента.
Доказать:
1. Алгоритм экстраполяции значений
x(k + 1|k) = E(xk+1|Y1k) |
è |
P (k + 1|k) = cov(xk+1, xk+1|Y1k) |
|
|
|
||||||||||||||||||||||||||||||||||
имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(k + 1 k) = xn |
|
|
|
+ |
∂f |
x=xkn |
(x(k k) |
|
|
|
xn) |
|
|
|
|
|
|
|
|
(10.5) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
| |
|
k+1 |
|
|
|
|
∂x |
|
| |
|
|
|
− |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂f |
|
|
|
|
|
|
|
|
|
|
|
|
∂f |
T |
|
|
|
|
|
|
n |
|
|
|
|
T |
n |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
P (k + 1|k) = |
|
|
x=xn · P (k|k) |
|
|
|
|
|
|
|
n + b(kk ) |
· Qk |
· |
b |
|
(xk ) |
(10.6) |
||||||||||||||||||||||
∂x |
∂x |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
x=x |
k |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. Алгоритм фильтрации значений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k+1 |
) |
è |
P (k + 1|k + 1) = |
|||||||||||||||||||
|
k+1 |
|
|
|
|
|
|
|
|
|
x(k + 1|k + 1) = E(xk+1|Y1 |
|
|
||||||||||||||||||||||||||
= cov(xk+1, xk+1|Y1 |
|
|
) зада¼тся рекуррентными соотношениями: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
x(k + 1|k + 1) = x(k + 1|k) + Kk+1 "yk+1 |
− h(xkn+1) − |
∂h |
|
|
(x(k + 1|k) − xkn+1)# ; |
||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||
∂x |
x=xn |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k+1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kk+1 = P (k + 1|k) |
|
|
|
|
|
x=xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.7) |
||||||||||||
∂h |
T |
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
∂h |
|
|
|
|
|
|
|
|
|
|
|
|
|
∂h |
|
T |
|
|
|
|
+ B(xkn+1)Rk+1BT(xkn+1) |
− |
|
|||||||||||||
× |
|
|
|
|
· P (k + 1|k) · |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
∂x x=xn |
|
|
|
∂x |
|
|
|
|
n |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
k+1 |
|
|
|
|
|
|
|
|
|
x=xk+1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.8) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P (k + 1|k + 1) = |
I − Kk+1 |
∂h |
|
|
|
|
|
|
! · P (k + 1|k) ; |
|
|
|
|
|
|
|
|
(10.9) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
∂x |
x=xn |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мальцева Н. В. |
Рекуррентная и адаптивная фильтрация |
|
28 |
||
Доказательство : Введ¼м следующие обозначения: |
|
|
|
||
def |
− xkn ; |
def |
def |
− h(xkn+1) . |
|
xk = xk |
xk+1 = xk+1 − xkn+1 ; |
yk+1 = yk+1 |
(10.10) |
||
Т. к. значение x¯0 неслучайно и соотношение (10.4) (опорная траектория) детерминировано, то, вычисляя условное математическое ожидание E( ·|Y1k) выражений (10.10), получим:
x(k|k) = x(k|k)−xkn ; |
x(k+1|k) = x(k+1|k)−xkn+1 ; |
y(k+1|k) = y(k+1|k)−h(xkn+1) ; |
||||
|
|
|
|
|
|
(10.11) |
Из (10.11) следует: |
|
|
|
|
|
|
|
x(k|k) = xkn + |
x(k|k) ; |
x(k + 1|k) = xkn+1 + x(k + 1|k) , |
(10.12) |
||
ãäå |
x(k|k) = E(Δxk|Y1k) è |
x(k + 1|k) = E(Δxk+1|Y1k). |
|
x(k|k) |
||
|
Таким образом, чтобы решить поставленную задачу, достаточно найти оценки |
|||||
è |
x(k + 1|k). |
|
|
|
|
|
Линеаризуем задачу. Разложим функции f(xk), b(xk) è h(xk+1), B(xk+1) в ряды Тейло ра соответственно в окрестностях точек xnk è xk+1 с точностью до членов первого порядка
малости относительно |
xk è |
xk+1. Соотношения (10.1) и (10.2) предстанут в следующем |
||||||||||||||||
âèäå: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xk+1 |
= f(xkn) + |
∂f |
|
|
|
|
xk |
+ b(xkn)wk + |
∂b |
|
|
xk wk + o(Δxk)! ; |
(10.13) |
|||||
|
|
|
|
|||||||||||||||
∂x |
x=xn |
∂x |
x=xn |
|||||||||||||||
|
|
|
|
|
|
k |
|
|
|
k |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
∂f |
|
|
|
n |
|
|
|
|
∂B |
|
|
|
+ o(Δxk+1)! . |
||
yk+1 |
= h(xk+1) + |
|
|
xk+1 + B(xk+1)vk+1 + |
|
|
|
xk+1 vk+1 |
||||||||||
∂x |
x=xn |
|
∂x |
x=xn |
||||||||||||||
|
|
|
|
|
|
|
k+1 |
|
|
|
|
|
|
k+1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.14) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычитая из соотношения (10.13) соотношение (10.4) (вид опорной траектории) и пренебре
предложения в условиях задачи |
|
∂b |
|
|
xk wk + o(Δxk) |
|
|||
гая слагаемым в круглых скобках, |
|
∂x |
|
x=xn |
см. аппроксимирующие |
||||
|
|
|
|
|
k |
|
|
|
|
|
|
íàéä¼ì: |
|
|
|
||||
x |
|
= |
|
∂x x=xkn |
x |
+ b(xn)w . |
(10.15) |
||
|
|
∂f |
|
||||||
|
k+1 |
|
|
|
|
|
k |
k k |
|
Учитывая (10.10) введ¼нные обозначения для |
xk, |
xk+1, |
|
yk+1 |
||||||
записать: |
|
|
|
|
∂x |
|
x=xk+1 |
x |
k+1 |
k+1 |
емым в круглых скобках в соотношении (10.14), |
∂B |
n |
|
v |
||||||
|
|
∂h |
x=xkn |
|
|
|
n |
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
yk+1 = |
|
xk+1 + B(xk+!)vk+1 . |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
и пренебрегая слага
+ o(Δxk+1) можно
(10.16)
Таким образом, мы получили линейные модели ((10.15) (10.16)) для оценивания вари ации вектора состояния xk относительно номинальной траектории по отклонению yk полученных измерений относительно номинальных. [Функции b(xk) è B(xk) вычисляя в точке номинальной траектории].
Для полученных линейных моделей может быть примен¼н линейный фильтр Калмана. Заметим при этом, что
cov(Δxk, xk|Y1k) = cov(xk, xk|Y1k) = P (k|k) cov(Δxk+1, xk+1|Y1k) = cov(xk+1, xk+1|Y1k) = P (k + 1|k)
Мальцева Н. В. |
Рекуррентная и адаптивная фильтрация |
29 |
Тогда из соотношений стандартного линейного фильтра Калмана с уч¼том (10.10) непосред ственно следует справедливость (10.5) (10.9), ч. т. д.
Что можно сказать о полученном алгоритме? Преимущество линеаризованного филь тра Калмана состоит в том, что коэффициенты усиления не зависят от состояния и могут быть вычислены заранее на основе номинального решения (опорной траектории). Однако имеется недостаток, заключающийся в том, что течением времени оценка может стать значительно отличающейся от опорной и тогда становятся существенными нелинейности.
При этом поскольку опорная траектория при данном подходе строится только на основе априорной информации (по заданному xn0 строится xnt è xnt +Δt), то с течением времени воз
растание ошибок прогноза становится практически неизбежным и тем самым нарушаются допустимые условия применимости рядов Тейлора для разложения нелинейных функций моделей системы и измерений.
Исправить эту ситуацию можно двумя путями:
использование измерительной информации для получения оценки xˆt на момент вре ìåíè t = tk;
уменьшением интервала прогноза с tk − t0 до минимального значения, т. е. экстрапо лируется значение xˆt+Δt по начальным условиям xˆt.
При правильной работе алгоритма оценивания значения xˆt è xˆt+Δt будут ближе к истинным , чем прогнозные значения xnt è xnt+Δt. Построив указанным способом новые опор ные траектории, расширяем класс опорных траекторий , введ¼нных ранее. Алгоритмом
оценивания, построенные с использованием процедуры линеаризации нелинейных функ ций моделей системы и измерений в точках расширенного класса опорных траекторий , будем называть расширенными линеаризованными алгоритмами оценивания .
Расширенный дискретный фильтр
Äàíî:
1. Модель системы:
xk+1 = f(xk) + Gk wk ; |
(10.17) |
2. Модель дискретных измерений:
yk+1 = h(xk+1) + vk+1 ; |
(10.18) |
3.Априорная информация вида (10.3);
4.Выборка измерений: Y1k = {ys : s = 1, . . . , k};
5.Аппроксимирующие предложения: функции f(xk) è h(xk+1) раскладываются в ря
ды Тейлора соответственно в окрестности точек x(k|k) = E(xk|Y1k) è x(k + 1|k) = = E(xk+1|Y1k), пренебрегая значениями o(xk −x(k|k)) è o(xk+1 −x(k + 1|k)), ãäå o(·)
бесконечно малая величина относительно своего аргумента; пренебречь значениями статистическими моментами третьего и более высокого порядков.
Доказать:
1. Алгоритм экстраполяции значений
x(k + 1|k) = E(xk+1|Y1k) è P (k + 1|k) = cov(xk+1, xk+1|Y1k)
Мальцева Н. В. |
Рекуррентная и адаптивная фильтрация |
30 |
||||||||||
имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
x(k + 1|k) = f(x(k|k)) ; |
|
|
|
T |
|
|
+ Gk Qk GkT ; |
(10.19) |
||||
P (k + 1|k) = ∂x x=x(k k) · P (k|k) |
|
∂x |
|
(10.20) |
||||||||
|
|
∂f |
|
| |
|
|
x=x(k k) |
|
||||
|
|
|
|
|
∂f |
|
|
| |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Алгоритм фильтрации значений
x(k + 1|k + 1) = E(xk+1|Y1k+1) |
è |
P (k + 1|k + 1) = cov(xk+1, xk+1|Y1k+1) |
|||||||
зада¼тся рекуррентными соотношениями: |
|
|
|
||||||
x(k + 1|k + 1) = x(k + 1|k) + Kk+1[yk+1 − h(x(k + 1|k))] ; |
(10.21) |
||||||||
∂h |
|
x=x(k+1 k)! · P (k + 1|k) ; |
(10.22) |
||||||
P (k + 1|k + 1) = I − Kk+1 ∂x |
|||||||||
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
T |
|
|
|
|
|
|
|
∂h |
|
|
|
× |
|
||
Kk+1 = P (k + 1|k) ∂x |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x=x(k+1|k)
× |
∂x x=x(k+1 k) · P (k + 1|k) · |
|
∂x |
|
|
|
|
+ Rk+1 |
|
(10.23) |
|||
|
|
∂h |
|
|
|
∂h |
|
T |
x=x(k+1 |
|
|
|
−1 |
|
|
|
| |
|
|
| |
k) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Доказательство :
Данную задачу можно рассматривать как частный случай предыдущей. После полу чения выборки измерений {Y1k} два значения оцениваемого вектора x, соответствующие
последовательным моментам времени tk è tk+1 и принадлежащего опорной траектории, могут быть выбраны так, что xnk = x(k|k) è xnk+1 = x(k + 1|k).
Кроме того, сопоставляя условие задач, видим, что G(xk) = Gk и не зависят от оценива емого процесса {xk}, (в предыдущей задаче G(xk) = b(xk)), à B(xk+1) = E, поэтому из соот ношений (10.5) (10.9), как частный случай, следует справедливость равентсв (10.19) (10.23). 
Отметим следующую особенность расширенного фильтра Калмана и всех его возмож ных модификаций: фильтр вычисляет искомые величины, минимизируя уравнения относи тельно последней оценки = и коэффициент усиления, и ковариационные матрицы зави
сят от текущей оценки и могут быть вычислены только в реальном масштабе времени. Ещ¼ большее возможное повышение точности оценивания может быть достигнуто за
сч¼т применения итерационного расширенного фильтра Калмана (естественно, за сч¼т воз растания объ¼ма вычислений). Итерационный расширенный фильтр Калмана способствует
уменьшению влияния нелинейностей в измерениях за сч¼т итерационного уточнения оцен ки при любом измерении до тех пор, пока изменение оценки не станет малым.
Формулы для такого фильтра выглядят следующим образом.
Обозначим :
(·)k|i значение величины (·) на k-ом шаге измерений после i-итераций;
(·)−k прогнозируемые значения величины (·) íà k-ûé шаг измерения; (·)+k оценка после k-шагов измерений.