

5.1. Классическая форма модели погрешностей
Линеаризованная относительно алгоритма идеальной работы модель погрешностей БИИМ в выработке параметров ориентации и навигационных параметров, включающая модели погрешностей в решении задач ориентации, преобразования сигналов акселерометров на навигационные оси и их интегрирования (вычисления составляющих векторов линейной скорости в проекциях на навигационные оси и географических координат места), может быть представлена с учетом управлений в следующем виде [1]:
![]()
![]()
![]()
![]()
![]() (5.1)
(5.1)
![]()
![]()
![]()
![]()
где
![]() погрешности БИИМ в
аналитическом моделировании горизонтной
системы координат с географической
ориентацией осей (географического
сопровождающего трехгранника)
погрешности БИИМ в
аналитическом моделировании горизонтной
системы координат с географической
ориентацией осей (географического
сопровождающего трехгранника)
![]() (рис. 5.1);
(рис. 5.1);
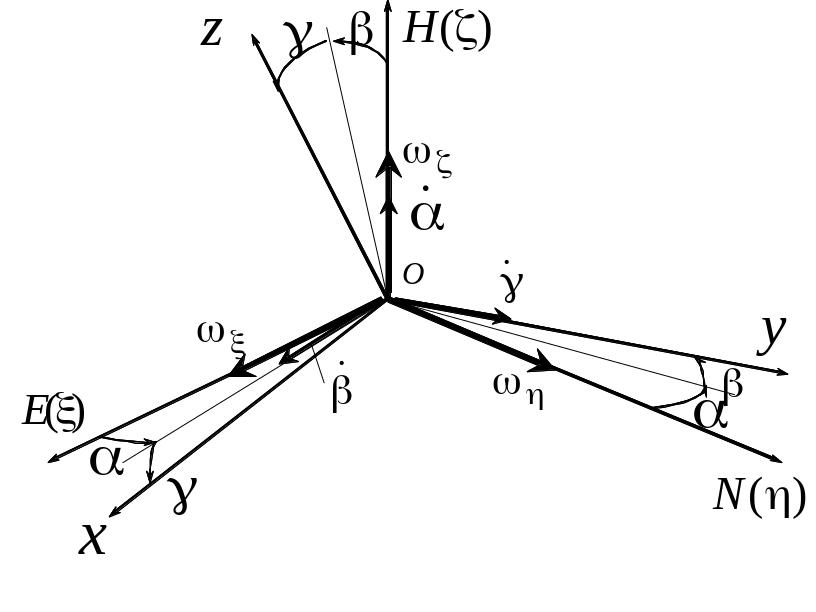
Рис.5.1. Погрешности БИИМ на ДУС в моделировании горизонтной системы координат с географической ориентацией осей
![]() погрешности в выработке
составляющих вектора линейной скорости;
погрешности в выработке
составляющих вектора линейной скорости;
![]() погрешности в выработке
географических широты, долготы и
высоты места;
погрешности в выработке
географических широты, долготы и
высоты места;
![]() проекции нескомпенсированных
дрейфов ДУС и так называемых "вычислительных"
дрейфов на оси горизонтной системы
координат;
проекции нескомпенсированных
дрейфов ДУС и так называемых "вычислительных"
дрейфов на оси горизонтной системы
координат;
![]()
проекции инструментальных погрешностей
акселерометров на оси горизонтной
системы координат;
проекции инструментальных погрешностей
акселерометров на оси горизонтной
системы координат;
![]()
погрешность компенсации вертикальной
составляющей вектора нормальной силы
тяжести, обусловленная погрешностями
знания координат места;
погрешность компенсации вертикальной
составляющей вектора нормальной силы
тяжести, обусловленная погрешностями
знания координат места;
![]() ,
,![]()
составляющие уклонения отвесной линии
(УОЛ) и аномалия силы тяжести;
составляющие уклонения отвесной линии
(УОЛ) и аномалия силы тяжести;
![]() ускорение силы
тяжести нормальной Земли;
ускорение силы
тяжести нормальной Земли;
![]() средний радиус
Земли;
средний радиус
Земли;
![]() угловая скорость
суточного вращения Земли;
угловая скорость
суточного вращения Земли;
![]()
погрешности компенсации ”вредных”
ускорений по соответствующим осям,
выражения для которых имеют
вид:
погрешности компенсации ”вредных”
ускорений по соответствующим осям,
выражения для которых имеют
вид:
![]()
![]() (5.2)
(5.2)
![]()
![]() составляющие угловой
скорости вращения горизонтного
трехгранника с географической ориентацией
осей, которые
определяются как
составляющие угловой
скорости вращения горизонтного
трехгранника с географической ориентацией
осей, которые
определяются как
![]() ,
,
![]() ,
,
![]() ,
(5.3)
,
(5.3)
![]() проекции кажущегося
ускорения на оси горизонтной
системы координат, которые
определяются выражениями:
проекции кажущегося
ускорения на оси горизонтной
системы координат, которые
определяются выражениями:
![]()
![]() (5.4)
(5.4)
![]()
5.2. Аналоговая форма модели погрешностей
Кинематические соотношения [1]:
 (5.5)
(5.5)
где
![]() - погрешности аналога ИСК (рис.5.2)
- погрешности аналога ИСК (рис.5.2)
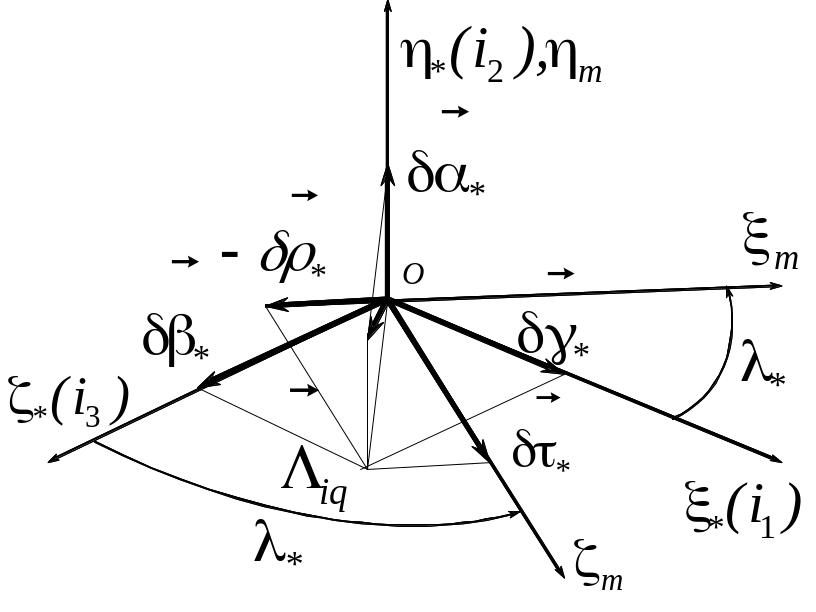
Рис.5.2. Погрешности БИИМ
в моделировании инерциальной системы
координат
![]() в проекциях на оси экваториальной
системы координат
в проекциях на оси экваториальной
системы координат
![]()
Модель погрешностей аналога инерциальной системы координат (ИСК)
 (5.6)
(5.6)
где
![]() - проекции нескомпенсированных дрейфов
ДУС и так называемых "вычислительных"
дрейфов на оси экваториальной системы
координат
,
определяемые из следующих соотношений:
- проекции нескомпенсированных дрейфов
ДУС и так называемых "вычислительных"
дрейфов на оси экваториальной системы
координат
,
определяемые из следующих соотношений:
![]() (5.7)
(5.7)
 (5.8)
(5.8)
 (5.9)
(5.9)
здесь
![]()
![]() и
и
![]() - проекции вектора
- проекции вектора
![]() нескомпенсированных дрейфов ДУС
соответственно на оси связанной
с объектом системы координат
нескомпенсированных дрейфов ДУС
соответственно на оси связанной
с объектом системы координат
![]() и на оси горизонтной системы
координат с географической ориентацией
осей
и на оси горизонтной системы
координат с географической ориентацией
осей
![]() ;
;
![]() - начальные значения погрешностей
на момент окончания решения задачи
точной выставки БИИМ.
- начальные значения погрешностей
на момент окончания решения задачи
точной выставки БИИМ.