

4.2 Технічні засоби діагностики мікроконтролерів
У залежності від методу, покладеного в основу контролю мікроконтролерів, розрізняють два основних види контролю: програмний і апаратурний.
Програмний контроль мікроконтролера заснований на використанні спеціальних програм, що контролюють його роботу. Програмно-логічний контроль не вимагає застосування спеціальної апаратури і дозволяє виявляти помилки, обумовлені випадковими збоями в процесі роботи. Однак цей вид контролю приводить до значного ускладнення програмного забезпечення.
Апаратурні засоби контролю використовують спеціальне додаткове контрольного устаткування, що працює незалежно від програми. Однак використання тільки апаратурного контролю приведе до значного ускладнення і подорожчання. Крім того, уведення кількості надлишкового складного устаткування може привести до зниження її загальної надійності. Тому при діагностиці мікроконтролерів ми застосуємо комбінований метод контролю, що представляє собою сполучення програмних і апаратурних засобів.
Мінімально необхідні можливості для розробки додатків надають макроасемблер і симулятор, що дозволяють відповідно писати програми і тестувати їх.
Використовування симулятора, не дозволяє провести всі необхідні тести. Симулятор - це програма, написана спеціально для мікроконтролера, роботу якого вона буде імітувати. Симулятор звичайно функціонує на тій же машині, де писалася програма додатка. На її вхід подається об'єктний (чи що виконується) код, який необхідно протестувати, і програма поводиться так, як вів би себе імітуємий мікроконтролер.
Регістри і порти вводу / виводу мікроконтролера представляються перемінними, що зберігаються в пам'яті комп'ютера. Так, 8-розрядний паралельний порт представлений байтом даних. Досить вважати ці дані, щоб у будь-який момент знати про хід виконання програми і стані виходів. Введення даних через порт можна імітувати записом відповідних даних у пам'ять. Процедура моделювання операцій обміну через порти вводу / виводу «розтягується» у часі, але якщо вона добре проведена, то дозволяє перевірити 80% функцій програми мікроконтролера.
Однак положення ускладнюється, коли необхідно враховувати тимчасові характеристики сигналів, переданих через порти вводу / виводу. Симулятор - це програма, що відтворює лише алгоритм роботи мікроконтролера. Навіть якщо використаний високопродуктивний комп'ютер, симулятор працює в десятки, а іноді й у сотні разів повільніше, ніж та ж програма, безпосередньо виконувана мікроконтролером.
Деякі функції, зв'язані з часом, не можна цілком змоделювати на симуляторі.
Проте, гарне володіння симулятором дозволяє досить швидко і з мінімальними капіталовкладеннями тестувати програми.
При програмуванні РІС-мікроконтролера використовуємо програматор PonyProg, який є відносно простим і дешевим пристроєм для використання в аматорських умовах з мінімальними вимогами до комп'ютера. Підтримка роботи програматора здійснюється спеціальною програмою, яка має також і набір тестів мікросхеми “на чистоту”.
Написавши програму на асемблері чи мові високого рівня і провівши компіляцію, ви одержуєте бінарний код, що виконується. Однак перш ніж тиражувати створений додаток, треба ретельне його протестувати. Щоб забезпечити повний контроль, програма повинна тестироваться в умовах, максимально близьких до умов майбутнього реального використання. Для цього існує кілька можливих рішень.
Перше рішення, що є найефективнішим, але також, на жаль, і найбільш дорогим, - придбати спеціальну апаратуру. Апаратний емулятор, що складає «серце» цієї системи, фактично являє собою спеціальний пристрій, іноді дуже складне, котре виконує усі функції PIC-мікроконтролером і заміняє його (див.рис 4.1)
![]()
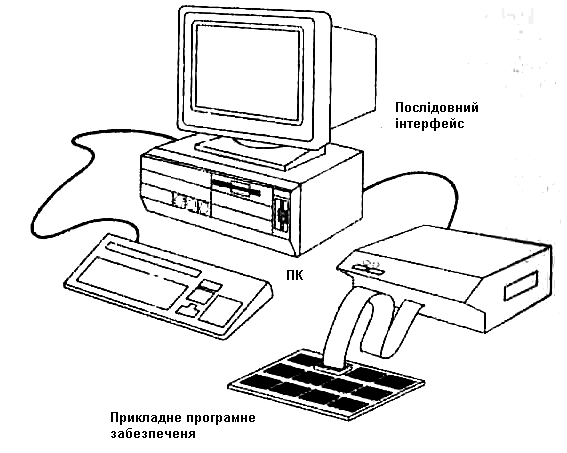
Рисунок 4.1 – Схема підключення емулятора
Цей емулятор постачений спеціальним сполучним шлейфом, називаним зондом эмуляцйї, на кінці якого є рознімання, аналогічний висновкам корпуса PIC-мікроконтролером.
За допомогою шлейфа емулятор підключається до макета додатка замість реального PIC-микроконтролера.
Для підключення емулятора до комп'ютера звичайно використовується послідовний інтерфейс RS232. Через нього в емулятор завантажується програма мікроконтролера і здійснюється керування її виконанням за допомогою спеціальної комп'ютерної програми.
Через те що емулятор - це «розрізнена» версія PIC-мікроконтролера, є доступ до його різних внутрішніх вузлів і шин, зокрема, можна довідатися, по яких адресах «проходить» програма, які коди записані в керуючі регістри і т.п. У разі потреби можна зупинити програму, що виконується, щоб вважати стан чи пам'яті деяких регістрів.
Емулятор забезпечує роботу додатка в реальному часі, оскільки він здатний функціонувати на частоті мікроконтролера. Емулятор - дорогий промисловий засіб, тому навряд чи має сенс купувати його для створення дрібносерійних чи одиничних додатків.