

5 Расчет траектории движения электронов
Ниже представлен листинг программы, которая предназначена для расчета траекторий электронов, находящихся в начальной точке на различном расстоянии от оси катушки.
Листинг программы:
origin : = 1 – Задание числа, с которого начинается нумерация координат вектора. По умолчанию эта нумерация начинается с нуля.
е := 1,6 10-19 Кл – Абсолютная величина заряда электрона
m:= 9,1 10-31 кг – Масса электрона
о:= 4 10-7 Гн/м – Фундаментальная магнитная постоянная
Rcp:= 2.5 10-2 м – Средний радиус катушки
L:= 5 10-2 м – Длина катушки
JN : = 678 А·вит – Число ампер витков
U0: = 125103 В – Ускоряющая разность потенциалов
zц: = 0,1 м – Координата центра катушки
 –
Выражение
для величины вектора магнитной индукции
–
Выражение
для величины вектора магнитной индукции
zmin : = zц – L 10 – Начальная координата из интервала численного интегрирования
zmax : = zц + L 10 – Конечная координата из интервала численного интегрирования
М: = 1000 – Количество точек, не считая начальной, в которых ищется численное решение
![]() –
Вектор
первых производных
–
Вектор
первых производных
r: = 1 10-3 – Шаг изменения начальных условий
t: = 1 ... 10 – Текущий номер, задающий величину начального условия
Решение дифференциального уравнения в зависимости от величины начального условия:
![]() –
Присвоение
величине у
значений матрицы, содержащей результаты
численного решения при некоторой
величине начального условия,
соответствующего номеру t.
–
Присвоение
величине у
значений матрицы, содержащей результаты
численного решения при некоторой
величине начального условия,
соответствующего номеру t.
z : = y(1)<1> – Присвоение переменной z значений аргумента, в которых ищется решение
r<t> : = y(t)<2> – Присвоение переменной r значений найденного решения при начальном условии, соответствующем номеру t.
j : = 1 .. rows(z) – Задание текущего номера
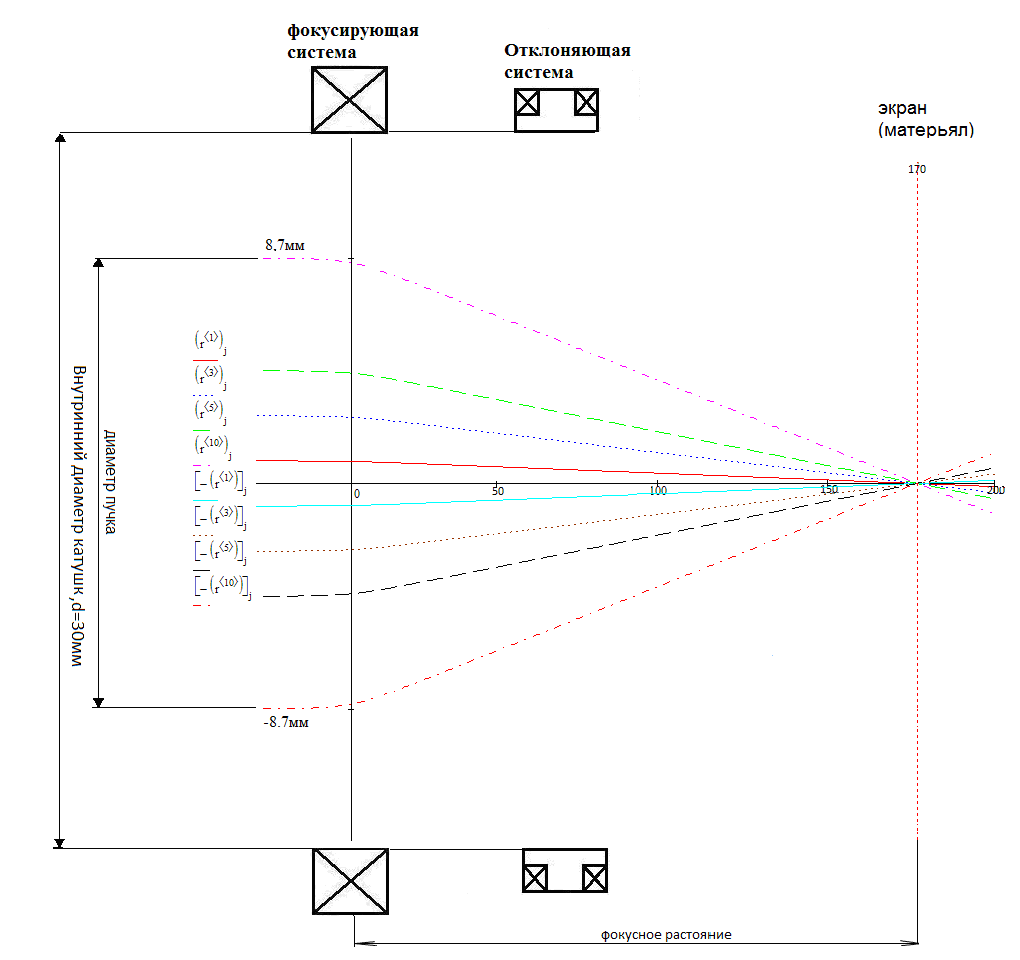
Рисунок 6.1 – траектории движения электронов.
Расстояния на входе фокусирующей системы отсчитываются от оптической оси, поэтому минус указывает на то, что отсчет ведется в низ от оси.
6 Заключение
В результате проделанной настоящей курсовой работы были рассмотрены основные особенности устройства установки для плавки меди, разработана ее электронно–оптическая система, рассчитаны основные параметры при заданных входных данных, выполнен сборочный чертеж разработанной системы, а также построена 3D модель электронно-оптической системы.
7 Список использованной литературы
1. Жигарев А.А. Электронно-лучевые приборы –М – Л: “Энергия”, 1965. – 336 стр.
2. Башенко В.В. Электроннолучевые установки – Л : “Машиностроение”, 1972. – 168 стр.
3. Панковец Н.Г., Литвинов Р.В. Вакуумные и плазменные приборы: методическое пособие по курсовому проектированию – Т: ТМЦДО, 2001. – 49 стр.
4. Алямовский И.В. Электронные пучки и электронные пушки – М: «Советское радио», 1966. – 452 стр.
5. Шерстнев Л.Г. Электронно - лучевые приборы –М – Л: “Энергия”, 1966. – 296 стр.
Битнер Л.Р. Вакуумная и плазменная электроника: учебное пособие – Томск: ТУСУР, 2007. – 150 стр.
7. Аксенов А.И. Вакуумные и плазменные приборы и устройства: учебное пособие – Томск: ТУСУР, 2007. – 135 стр.