

Классификация аср по виду используемой энергии.
АСР по виду использованной энергии для передачи воздействий, а следовательно конструкции основных элементов функциональной схемы можно разделить на 3 группы.
1. Прямого действия ( не использующие внешний источник энергии).
2. Непрямого действия.
3. Комбинированные.
Каждая из 3 групп подразделяется на электрические, пневматические и гидравлические.
АСР с регуляторами прямого действия. В этих системах для перемещения регулированного органа используется энергия регулируемой среды. В регуляторах прямого действия чувствительный элемент является одновременно и элементом сравнения и исполнительным механизмом.
Данные регуляторы имеют простую конструкцию и надежны в эксплуатации, однако не на всех объектах управления их можно использовать. Так для перестановки громоздких регулирующих органов, работающих при высоких температурах и давлениях, требуются значительные перестановочные усилия и энергии регулируемой среды недостаточно.
К регуляторам прямого действия относятся рассмотренный регулятор Ползунова (рис.10).
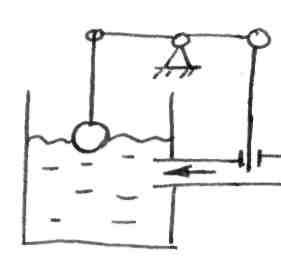
Рисунок 10 – Схема регулятора прямого действия
АСР с регулятором непрямого действия. В данных системах для передачи воздействий между элементами системы и перемещения регулирующих органов используются внешние источники энергии (электрические, пневматические и гидравлические).
При использовании электрического источника энергии (рис.11, а) соответственно используются электрические воздействия (сигналы). Преимущество данных систем возможность передачи сигнала на различные расстояния и их компактность. Недостаток – пожаро- и взрывоопасность, чувствительность к воздействию окружающей среды, особенно к влажности.
В пневматических АСР воздействия передаются в виде импульсов давления сжатого воздуха (рис.11, б). Регулирующие органы приводятся в действие также энергией сжатого воздуха. Эти системы надежны, безопасны, но ограниченная протяженность пневмопроводов и достаточно малая мощность при перемещении регулирующего органа. Так же необходимо специальная подготовка воздуха (очистка от масла, осушение).
В гидравлических АСР связь между элементами функциональной системы осуществляется с помощью гидроприводов (рис.11, в). Они обладают преимуществами пневматических АСР, плюс большая мощность гидравлических исполнительных механизмов. Однако гидросистемы являются сложными и дорогими устройствами, поэтому получили наименьшее распространение.
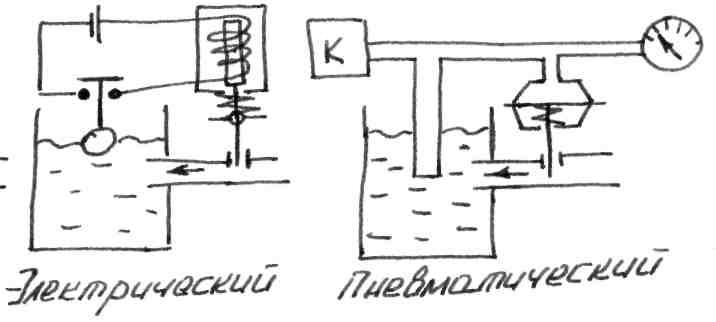
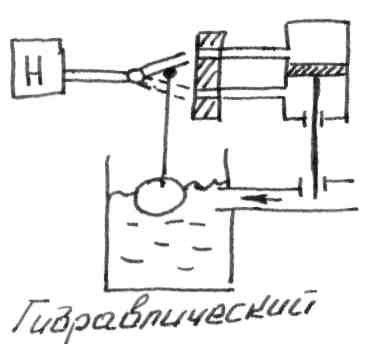
Рисунок 11 – Схемы регуляторов не прямого действия
Иногда в системах АСР используется несколько видов энергии. Например: связь между элементами функциональной схемы электрическая, а между исполнительным механизмом и регулирующим органом гидравлическая. Т.е. сочетается быстродействие и дистанционность электрических регулирующих устройств с большими перестановочными усилиями и плавностью хода гидравлических исполнительных устройств. Данные АСР являются комбинированными.
Классификация аср по способу действия на объект.
По способу действия на объект АСР делятся на 2 группы:
1.Непрерывные.
2.Дискретные (прерывистые).
Непрерывной АСР называется такая система, в которой при непрерывном изменении регулируемого параметра происходит непрерывное изменение всех величин, характеризующих состояние системы. В непрерывной АСР все ее звенья должны обязательно иметь непрерывные статические характеристики.
Пример: Подержание постоянного уровня жидкости в резервуаре (рис.12). Вода подается в резервуар по трубопроводу 1 через шиберный клапан 2.Уровень жидкости контролируется с помощью пьезометрической трубки 3, в которую подается постоянный расход воздуха по пневмопроводу 4, который также связан с мембранным исполнительным механизмом 5.При плавном непрерывном уровни жидкости, давление в пневмопроводе плавно увеличивается. В результате этого мембрана, преодолевая действия пружины, плавно прогибается, опуская шибер 2. Тем самым плавно уменьшает подачу воды в емкость.
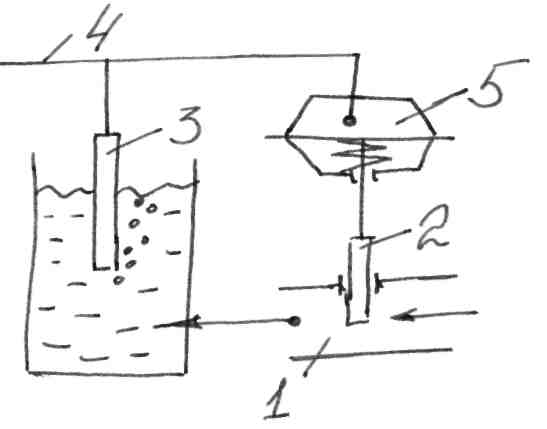
Рисунок 12 – Схема непрерывной АСР
Дискретной АСР называется такая система, в одном из звеньев которой нарушается непрерывное изменение какой-либо величины при непрерывном изменении регулируемой величины.
Дискретные АСР на релейные и импульсные.
Релейной называется такая система, в которой имеется хотя бы одно звено со статической характеристикой релейного типа. Характеристика релейного типа – это такая зависимость между входными и выходными сигналами данного звена, когда при непрерывном изменении входного, выходной сигнал меняется скачком при некоторых определенных значениях входной величины, а в промежутке между ними остается постоянной.
Пример:
Регулирования жидкости АСР с тремя
электродами (рис.13). Первый контакт –
верхнего уровня, второй – нижнего
уровня, роль третьего контакта выполняет
емкость. Контакты включены в цепь
управления питаемое
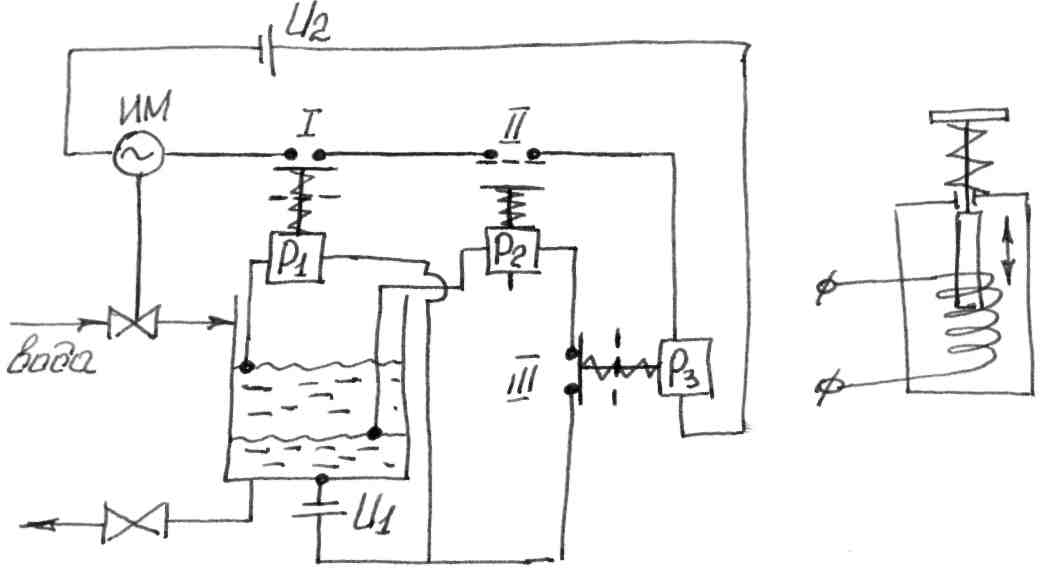
Рисунок 13 – Схема АСР релейного типа
При сниженном уровне ниже контакта 2, реле Р2 обесточивается и замыкает контакты II. По цепи исполнительного механизма и через реле Р3 начинает течь ток. Открывается вентиль 4 и размыкаются контакты III. Идет заполнение резервуара. При достижении жидкости вновь контакта 2, реле Р2 не срабатывает, так как разомкнуты контакты III.
Когда уровень жидкости достигнет контакта 1 срабатывает реле Р1 и контакты 1размыкаются. Цепь исполнительного механизма разомкнется, и подача воды прекратится. Одновременно с этим обесточенное реле Р3 замкнет контакты III в результате срабатывает реле Р2 размыкая контакты II, поэтому когда уровень жидкости снизится и реле Р1 обесточится замыкая контакты I, цепь исполнительного механизма остается разорванной.
Таким образом, при плавном (непрерывном) изменении уровня регулирующий орган будет перемещаться прерывисто, занимая два положения «открыто» и «закрыто».
Импульсной АСР называется такая система, в которой имеется импульсный элемент, т.е. элемент преобразующий непрерывное изменение входного сигнала в отдельные импульсы выходного сигнала.
Наиболее часто используют два типа импульсных элементов. Элемент первого типа амплитудно-импульсная модуляция формируют на выходе равностоящие импульсы одинаковой длительности, амплитуда которых пропорционально входной величине. Графически это можно выразить следующим образом (рис.14). Если входной сигнал на элемент изменяется по синусоидальному закону, то выходной будет представлен импульсами с Т0 = const; τ = const; а=КХ (а- амплитуда, К-коэффициент, Х- значение входного сигнала).
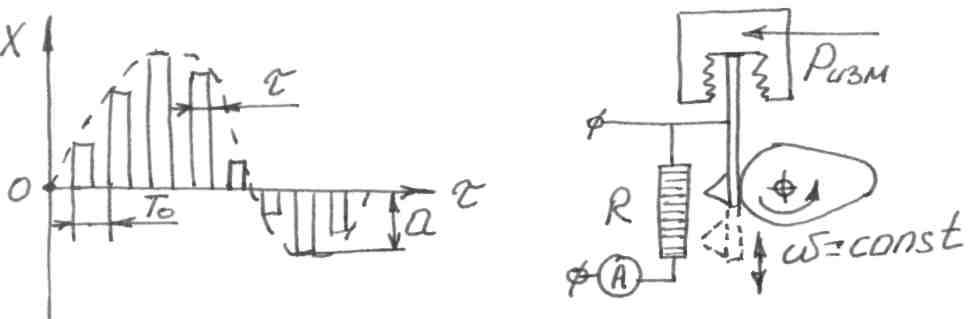
Рисунок 14 – График амплитудно-импульсной модуляции
Пример: Измеряемое давление преобразуется в изменение реостата R (рис.14), но шток сильфона выполняющий роль ползуна реостата, констатирует с реостатом непостоянно, а прижимается вращающимся кулачком. Условие Т0 = const и τ = const, обеспечивается за счет ω = const (угловая скорость вращения кулочка)
Импульсные элементы второго типа формируют на выходе импульсы одинаковой амплитуды, продолжительность которых пропорционально входной величине. Это называется широтно-импульсной модуляцией, т.е. τ= k·Х.
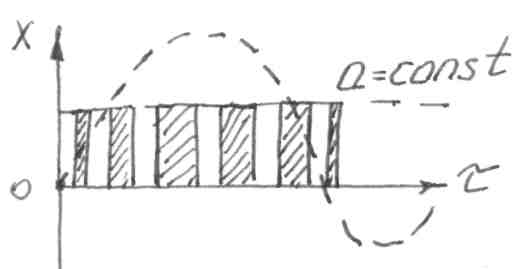
Рисунок 15 – График амплитудно-импульсной модуляции
Импульсные элементы позволяют уменьшить расход энергии на привод регулирующего органа.
Если АСР включает в себя цифровые вычислительные устройства, то они так же относятся к импульсным системам.