

16.Соединения динамических звеньев.
Поскольку исследуемый объект в целях упрощения анализа функционирования разбит нами на звенья, то после определения передаточных функций для каждого звена встает задача объединения их в одну передаточную функцию объекта. Вид передаточной функции объекта зависит от последовательности соединения звеньев:
1) Последовательное соединение.
![]()
Wоб = W1.W2.W3…
При последовательном соединении звеньев их передаточные функции перемножаются.
2) Параллельное соединение.
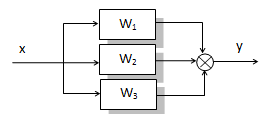
Wоб = W1 + W2 + W3 + …
При параллельном соединении звеньевих передаточные функции складываются.
3) Обратная связь
![]()
Передаточная функция по заданию (х):
![]()
«+» соответствует отрицательной ОС,
«-» - положительной.
Для определения передаточных функций объектов, имеющих более сложные соединения звеньев, используют либо последовательное укрупнение схемы, либо преобразуют по формуле Мезона.
17.Характеристический полином и характеристическое уравнение.
Поскольку
передаточная функция разомкнутой
системы является в общем случае
дробно-рациональной функцией вида W
=
![]() ,
то передаточные функции замкнутой
системы могут быть преобразованы:
,
то передаточные функции замкнутой
системы могут быть преобразованы:
гдеD = A + B.
Как видно, эти передаточные функции отличаются только выражениями числителей. Выражение знаменателя называется характеристическим выражением замкнутой системы и обозначается как Dз(s) = A(s) + B(s), в то время как выражение, находящееся в знаменателе передаточной функции разомкнутой системы W, называется характеристическим выражением разомкнутой системыА(s).
19.Частотные характеристики интегрирующих систем.
Идеальное интегрирующее звено.
Звено описывается дифференциальным уравнением:
![]() .
.
Его кривая разгона:
![]() ,
,
передаточная функция:
![]() ,
,
амплитудно-фазовая характеристика:
![]() ,
,
амплитудно-частотная характеристика:
![]() ,
,
фазочастотная характеристика:
![]() .
.
На рис. 47 и 48 приведены временные, а на рис. 49, 50, 51 – частотные характеристики идеального интегрирующего звена.
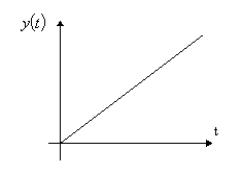
Рис.47. Кривая разгона
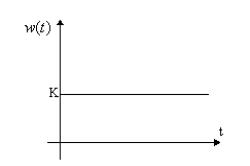
Рис.48. Импульсная переходная функция
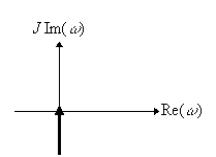
Рис. 49. Амплитудно-фазовая характеристика
![]()
Рис. 50. Амплитудно-частотная характеристика
![]()
Рис. 51. Фазочастотная характеристика
Реальное интегрирующее звено
Звено описывается дифференциальным уравнением:
![]() .
.
Его кривая разгона:
![]() ,
,
импульсная переходная функция:
![]() ,
,
передаточная функция:
![]() ,
,
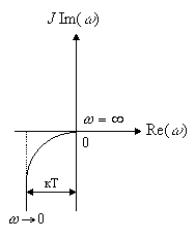
амплитудно-фазовая характеристика:
![]() ,
,
амплитудно-частотная характеристика:
![]() ,
,
фазочастотная характеристика:
![]() .
.
На рис. 53, 54, 55, 56, 57 приведены соответственно кривая разгона, импульсная переходная функция, АФХ, АЧХ и ФЧХ идеального интегрирующего звена.
Примером такого звена является двигатель (рис. 58).
Уравнение двигателя, приведенного на рис. 58, можно записать в виде:
![]() ,
,
где T– постоянная времени двигателя,
k – коэффициент передачи.
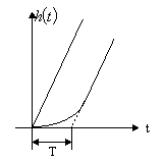
Рис. 53. Кривая разгона
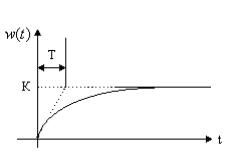
Рис. 54. Импульсная переходная функция
![]()
Рис. 55. Амплитудно-фазовая характеристика
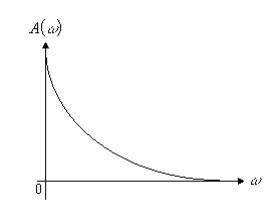
Рис. 56. Амплитудно-частотная характеристика
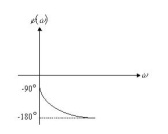
Рис. 57. Фазочастотная характеристика
![]()
Рис. 58. Реальное интегрирующее звено:
X – управляющее воздействие (например, подводимое напряжение в двигателе), Y – угол поворота вала двигателя
![]()
где![]() –
коэффициент пропорциональности между
управляющим воздействием X и выдающим
моментом M;
–
коэффициент пропорциональности между
управляющим воздействием X и выдающим
моментом M;
Y – приведенный к валу двигателя суммарный момент инерции;
![]() –
соответственно
пусковой момент и скорость холостого
хода двигателя при некотором значении
управляющего воздействия.
–
соответственно
пусковой момент и скорость холостого
хода двигателя при некотором значении
управляющего воздействия.