

4.3 Определение передаточной функции, принципиальной схемы и параметров параллельного корректирующего устройства
Передаточную функцию параллельного корректирующего устройства получим через передаточную функцию последовательного корректирующего устройства и передаточную функцию звеньев, охваченных обратной связью.
![]() (4.18)
(4.18)
Охватим ООС звенья, которые ухудшают устойчивость системы, т.е. двигатель, электромашинный усилитель и усилитель напряжения:
![]() (4.19)
(4.19)
Передаточная функция последовательного корректирующего звена имеет вид:
![]() (4.20)
(4.20)
Таким образом мы можем получить общий вид передаточной характеристики параллельного корректирующего устройства:

![]() ,
(4.22)
,
(4.22)
где
![]() ,
(4.23)
,
(4.23)
где
![]() (4.24)
(4.24)
![]() (4.25)
(4.25)
![]() (4.26)
(4.26)
20log0.191 = -14.4 (4.27)
По виду Кос(р) запишем Lос():

5. Анализ динамики скорректированной системы
5.1 Определение устойчивости замкнутой скорректированной системы по корням характеристического уравнения с помощью эвм
Передаточная функция скорректированной системы соответствует желаемой ЛАЧХ и имеет вид:

![]() (5.1)
(5.1)
Корни характеристического уравнения Сск(р)=0, рассчитанные с помощью ЭВМ, сведём в таблицу 6.
Таблица 6. Корни характеристического уравнения Сск(р)=0
Корни |
Re pi |
Im pi |
Р0 |
-23,57119418 |
37,22889429 |
Р1 |
-12,33396483 |
7,60401849 |
Р2 |
-4,0218834423 |
0 |
Р3 |
-66,54587343 |
0 |
Р4 |
-12,33396483 |
-7,670401849 |
Р5 |
-23,57119418 |
-37,22889429 |
Замкнутая система является устойчивой, так как все корни характеристического уравнения имеют отрицательную вещественную часть.
5.2 Построение кривой переходного процесса замкнутой скорректированной системы
С помощью пакета прикладных программ ТАУ-1 по заданной передаточной функции получим временные характеристики переходного процесса, которые сведем в таблицу 7.
Переходная функция изображена на рисунке 8.
Таблица 7. Временная характеристика переходного процесса
t,с |
h(t) |
t,с |
h(t) |
0 |
0 |
0,34 |
1,21 |
0,11 |
0,3 |
0,44 |
1,20 |
0,15 |
0,6 |
0,60 |
1,08 |
0,19 |
0,9 |
0,66 |
1,05 |
0,21 |
1 |
0,90 |
1,03 |
0,26 |
1,2 |
1,2 |
1,01 |
0,30 |
1,2 |
1,5 |
1 |
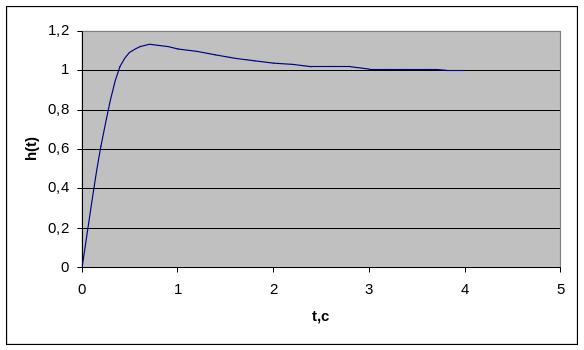
Рисунок 13 – Графическое отображение переходного процесса
Показатели качества переходного процесса равны:
![]() %
%![]() =21%;
(5.2)
=21%;
(5.2)
Nпер = 1;
tрег = 1,3 c.