

1.2.1 Реальный объект и расчетная схема
Исследование реального объекта начинают с выбора расчетной схемы (модели). Для этого, перед тем как приступить к расчету конструкции, устанавливают, что в данном случае существенно и что несущественно. Необходимо произвести схематизацию объекта и отбросить все факторы, которые не оказывают значительного влияния на суть задачи. Это необходимо, поскольку учет всех факторов невозможен впоследствии их неисчерпаемости.
Реальный объект, мысленно освобожденный от несущественных особенностей, называется расчетной схемой. Для одного реального объекта может существовать несколько расчетных схем в зависимости от требуемой точности и целей расчета.
Построение расчетной схемы начинается со схематизации структуры и свойств материала. Принято рассматривать все материалы как сплошную среду - независимо от особенностей молекулярного строения вещества. Кроме того, среда считается однородной (несмотря на кристаллическое решение). Обычно среду считают изотропной (кроме анизотропных пластмасс).
Вводятся упрощения в геометрию реального объекта. Основным приемом здесь является приведение формы тела к схеме стержня. Под стержнем понимают тело, одно из измерений которого (длина) много больше двух других. Стержень может иметь поперечное сечение как постоянное, так и переменное вдоль оси. Многие сложные конструкции можно рассматривать, как состоящие из стержней. Их называют стержневыми системами. Часто стержень называют брусом или балкой.
Второй типовой геометрической схемой является оболочка. Это - тело, одно измерение которого (толщина) значительно меньше двух других.
В схеме делаются упрощения и в системе сил.
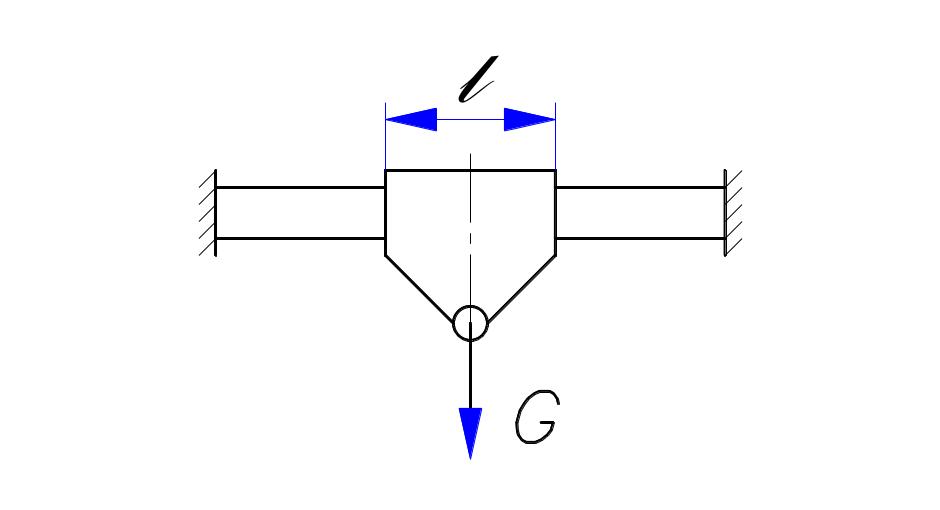
Например, нагрузку от подвески с грузом, распределенную по длине l, при расчете балки можно заменить сосредоточенной силой G.
1.2.2 Силы внешние и внутренние
Силы являются мерилом взаимодействия тел. Если конструкция рассматривается изолированно от окружающих тел, то действие последних на конструкцию заменяется силами, которые называются внешними. Примером сил, распределенных по объему тела, является вес. В число внешних сил включаются и реакции связей, дополняющие систему сил до равновесной.
Взаимодействие между частями рассматриваемого объекта внутри очерченной области объекта характеризуется внутренними силами. Внутренние силы возникают не только между отдельными взаимодействующими узлами конструкции, но и между всеми сложными частицами объекта.

Например, если стержень нагружен силами Р1, Р2, …, Рп, то в нем возникают внутренние силы, которые выявляются, если рассечь мысленно стержень сечением А на две части. Такой прием выявления внутренних сил называется методом сечений.
Так как связи между двумя половинами стержня устранены, их необходимо заменить системой внутренних сил. Из статики мы знаем, что из уравнений равновесия можно найти не закон распределения внутренних сил, а лишь их равнодействующую. Перенеся ее в центр тяжести сечения (что делается с введением пары сил), мы получим главный вектор R и главный момент М.
Выберем систему координат х, у, z таким образом, чтобы ось z была направлена нормально к плоскости сечения, а х и у располагались в этой плоскости.
Спроектировав R и М на эти оси, получим 6 составляющих: 3 силы и 3 момента. Эти составляющие называются внутренними силовыми факторами в сечении стержня.
Составляющая N, направленная по оси z, называется нормальной или продольной силой в сечении.
Силы Qx и Qy называются поперечными силами. Момент относительно оси z (Mк) называется крутящим моментом, а моменты Мх и Му - изгибающими моментами. Названные 6 составляющих находятся из уравнений равновесия для отсеченной части стержня.