

Расчёт тактических параметров рлс
Уровень порога обнаружения:
 (4.1)
(4.1)
Ширина
полосы пропускания линейного тракта
( )
складывается из ширины спектра
радиочастот принимаемого сигнала (
)
складывается из ширины спектра
радиочастот принимаемого сигнала ( ),
доплеровского смещения частоты сигнала
(
),
доплеровского смещения частоты сигнала
( )
и запаса полосы, требуемого для учёта
нестабильностей настроек приемника
(
)
и запаса полосы, требуемого для учёта
нестабильностей настроек приемника
( )
т.е.:
)
т.е.:
 (4.2)
(4.2)
Определим ширину спектра принимаемого сигнала.
 (4.3)
(4.3)
Величина определяется по формуле:
 (4.4)
(4.4)
где
 и
и
 – нестабильности частот сигнала
– нестабильности частот сигнала
 и гетеродина
и гетеродина
 соответственно.
соответственно.
 (4.5)
(4.5)
 (4.6)
(4.6)
Определяем
доплеровский сдвиг по частоте
 .
.
 (4.7)
(4.7)
где
 – радиальная скорость.
– радиальная скорость.

Промежуточную
частоту выбираем из условия:

где
 - обобщенная расстройка.
- обобщенная расстройка.
d - эквивалентное затухание контуров, выбирается из ряда d > 0.02...0.01.
Выбираем
d=0.02.
Из условия подавления зеркального
канала на 40дБ ( ),
находим по графику
=25
дБ (
=17,8)
(рис.4.1).
),
находим по графику
=25
дБ (
=17,8)
(рис.4.1).
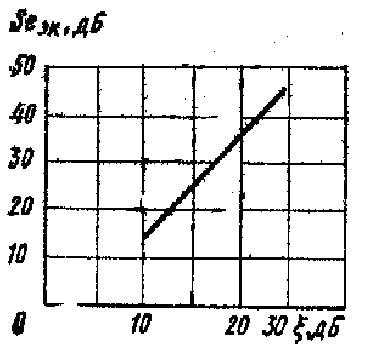
Рис.4.1. Нахождение обобщённой расстройки
Промежуточную
частоту выберем из стандартного ряда
 .
.
 (МГц)
(МГц)




Ширина полосы пропускания линейного тракта ( ) равна:

Поскольку полоса пропускания шире спектра сигнала, то нет необходимости в использовании АПЧ в приемнике.
Уровень порога обнаружения:

Ошибка измерения характеризует ошибку, вызванную действием импульсов при заданных форме сигнала и отношения сигнал/шум в случае оптимальной обработки. Она определяет теоретически предельную точность радиолокационного измерения.
Ошибка по азимуту:
 (4.8)
(4.8)
Ошибка по дальности:
 (4.9)
(4.9)
Синтез структурной схемы Выбор алгоритма оптимального обнаружения сигнала.
В
реальных условиях фаза первого импульса
случайная и с равной вероятностью
принимает значение от 0 до 2
 .
Поскольку пачка импульсов когерентная,
всякие изменения начальной фазы первого
импульса вызывают равные изменения
фаз всех импульсов пачки. Тогда угол
.
Поскольку пачка импульсов когерентная,
всякие изменения начальной фазы первого
импульса вызывают равные изменения
фаз всех импульсов пачки. Тогда угол
 между опорным и полезным сигналом
произвольно меняется и может в частности
стать равным
между опорным и полезным сигналом
произвольно меняется и может в частности
стать равным
 .
При данном угле фазовый детектор не
чувствителен к сигналу и реагирует
только на внефазную составляющую шума.
В таком случае вместо фазового детектора
применим квадратурную обработку
одиночного импульса пачки, согласно
функциональной схеме на рис. 5.1.
.
При данном угле фазовый детектор не
чувствителен к сигналу и реагирует
только на внефазную составляющую шума.
В таком случае вместо фазового детектора
применим квадратурную обработку
одиночного импульса пачки, согласно
функциональной схеме на рис. 5.1.
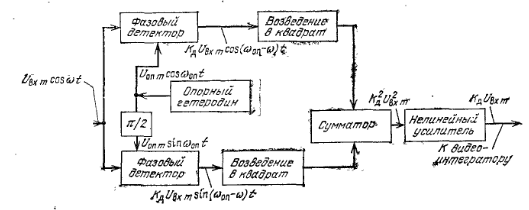
Рис. 5.1. Функциональная схема когерентного приема сигналов с использованием квадратурных каналов.
К
двум фазовым детекторам подводится
высокочастотный сигнал
 .
К этим же детекторам поступает от
гетеродина опорное напряжение, причем
к одому непосредственно, а к другому
— через фазовращатель, изменяющий фазу
сигнала на
.
К этим же детекторам поступает от
гетеродина опорное напряжение, причем
к одому непосредственно, а к другому
— через фазовращатель, изменяющий фазу
сигнала на
 .
На выходе первого детектора образуется
напряжение
.
На выходе первого детектора образуется
напряжение
 а на выходе второго
а на выходе второго
 .
Полученный напряжения видеоимпульсов
повторяются с частотой следования
.
Полученный напряжения видеоимпульсов
повторяются с частотой следования
 ,
они возводятся в квадрат и складываются.
,
они возводятся в квадрат и складываются.

Как видно, такое решение исключает влияние возможного неравенства частот опорного гетеродина и сигнала из за доплеровского смещения частоты.
Нелинейный
усилитель, имеющий соответствующую
амплитудную характеристику, извлекает
квадратный корень из напряжения
 ,
в результате чего амплитуда импульсов
на выходе видеоинтегратора прямо
пропорциональна амплитуде
,
в результате чего амплитуда импульсов
на выходе видеоинтегратора прямо
пропорциональна амплитуде
 входного
сигнала.
входного
сигнала.
Дальнейшее
когерентное накопление пачки импульсов
реализуется с помощью линии задержки
ЛЗ и сумматора (рис.5.2). Когерентное
суммирование приводит к росту отношения
сигнал/шум на выходе накопителя по
сравнению с выходным отношением.
Задержка осуществляется периодом
повторения импульсов в пачке
 .
Суммарная задержка
.
Суммарная задержка


Рис. 5.2 – Реализация сумматора и линии задержки
После квадратурной обработки сигнал поступает на АЦП, где подвергается дискретизации и квантованию и подаётся в ЛЗ, выполненную на РГ. Каждый из регистров РГ имеет r разрядов и l ячеек памяти. Необходимый объём памяти: Q = r · l · Nn, где Nn – число импульсов в пачке. Далее сигнал поступает на устройство принятия решения (УПР), которое полученное значение с пороговым, и принимает решение об обнаружении сигнала.
С выхода устройства принятия решения УПР сигнал подаётся на ЭЛТ, усиливаясь предварительно в видеоусилителе. Для обеспечения нормальной работы ЭЛТ необходимо подавать сигналы от датчика углового положения антенны, обеспечивая развёртку по азимуту. Развёртка по дальности обеспечивается подачей зондирующего импульса, который запускает развёртку по дальности.
При обнаружении цели на выходе видеоусилителя появится напряжение, которое, модулируя луч, изменит его яркость. Развёртка луча по дальности позволяет определить дальность до цели, а развёртка по азимуту – направление прихода отражённых сигналов. Для измерения дальности на экране ЭЛТ формируются метки дальности в виде колец, расстояние между которыми зависит от периода повторения импульсов масштаба, формируемых схемой электронных меток СЭМ. Она же формирует и метки азимута.