

Кинематический анализ механизма поршневого компрессора кинематический анализ механизма графоаналитическим методом
Определение скоростей и ускорений точек и угловых скоростей звеньев механизма методом полюса.
При
использовании данного метода исследования
можно определить мгновенные значения
скоростей точек и угловых скоростей
звеньев для данного положения механизма,
определяемого углом поворота
 ведущего звена. Основной недостаток
данного метода заключается в том, что
угловая скорость ведущего звена
принимается равной постоянному значению.
Проанализируем механизм, используя
метод полюса.
ведущего звена. Основной недостаток
данного метода заключается в том, что
угловая скорость ведущего звена
принимается равной постоянному значению.
Проанализируем механизм, используя
метод полюса.
Механизм состоит из следующих звеньев: кривошипа АВ = l1 = 0.2 м; ВЕ = l2 = 0.8 м; BC = l4 = 0.8 м; поршней F и D. α = 750 – угол развала осей цилиндров, φ = 450, n = 1000 об/мин.
Угловая скорость звена 1:
 c-1
(8)
c-1
(8)
Скорость точки В:
 м/с
(9)
м/с
(9)
Скорость точки Е:
 (10)
(10)
Вектор
 перпендикулярен ЕВ. Вектор
перпендикулярен ЕВ. Вектор
 лежит на прямой ЕО. Графически складываем
векторы
лежит на прямой ЕО. Графически складываем
векторы
 и
,
зная что их сумма равна
.
Графическим методом получено:
и
,
зная что их сумма равна
.
Графическим методом получено:
Направление
угловой скорости
 определим по направлению
определим по направлению

 м/с
(11)
м/с
(11)
 (12)
(12)
 c-1
(13)
c-1
(13)
Для звена 4 имеем:
 (14)
(14)
Вектор
 перпендикулярен СВ. Вектор
перпендикулярен СВ. Вектор
 лежит на прямой СО.
лежит на прямой СО.
Зная направление всех векторов, графически находим:
 м/с
(15)
м/с
(15)
 (16)
(16)
 c-1
(17)
c-1
(17)
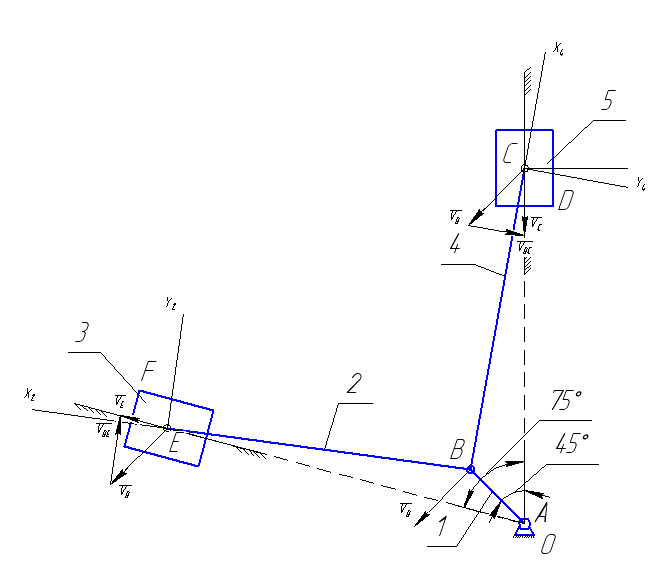
Рис. 3. План скоростей механизма
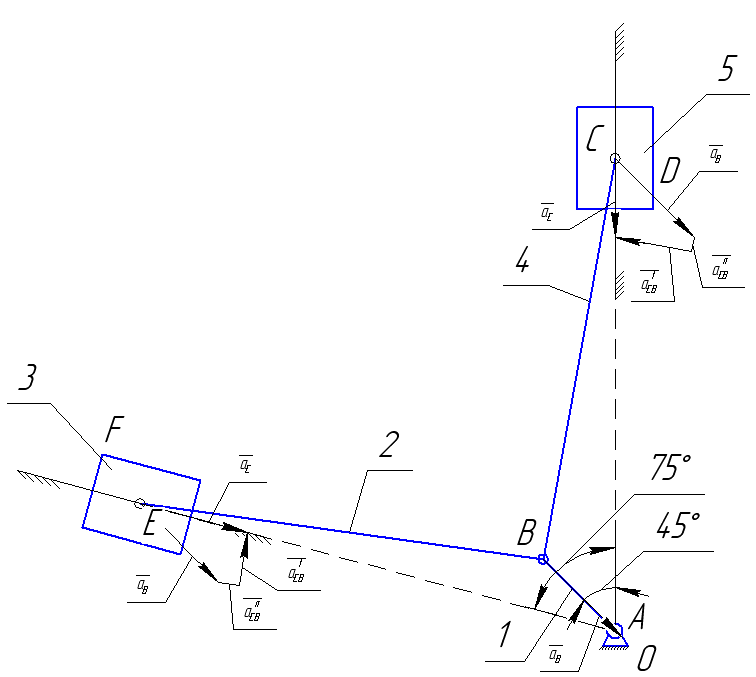
Рис. 4. План ускорений механизма
Ускорение точки В:
 м/с2
(18)
м/с2
(18)
Звено 2 совершает плоскопараллельное движение.
Ускорение точки E:
 (19)
(19)
Вектор
 направлен вдоль ЕА, т.е.
параллельно ЕА.
направлен вдоль ЕА, т.е.
параллельно ЕА.
Вектор
 ,
,
 параллельно ЕВ;
параллельно ЕВ;
 перпендикулярно ЕВ.
перпендикулярно ЕВ.
Ускорение точки Е можно записать так:
 (20)
(20)
Сложение векторов производим графически. См. чертёж.
 м/с2
м/с2
 м/с2
м/с2
 с-2
с-2
 м/с2
м/с2
Аналогично находим ускорения точки С и звена 4.
 (21)
(21)
 м/с2
м/с2
 м/с2
м/с2
 с-2
с-2
 м/с2
м/с2
Определение скоростей точек звеньев механизма методом мгновенного центра скоростей.
Изображаем схему механизма в масштабе (рис. 5)

Рис. 5. План скоростей механизма
Скорости точки В:

 м/с
м/с
Звена 2 совершает плоскопараллельное движение. Находим МЦС звена 2. См. чертёж.
 ;
;
 м/с
м/с
Угловая скорость :
 c-1
c-1
Звено 4 также совершает плоскопараллельное движения. Находим МЦС звена 4.
 c-1
c-1
 м/с
м/с
КИНЕМАТИЧЕСКИЙ АНАЛИЗ АНАЛИТИЧЕСКИМ МЕТОДОМ
Определение крайних (мёртвых) положение механизма
Для
данного кривошипно-шатунного механизма
крайними являются положения, когда
кривошип АВ
и
шатун ВС,
то
вытягиваются,
то складываются в одну прямую линию
(рис. 6). Тогда
 и
и
 будут
углами рабочего и холостого хода
механизма соответственно. На рисунке
6 показаны ход поршня Н
= 0,8м ,
ВН
,СН
, DH
и
ВК,
СК,
DK
- точки,
определяющие крайние положения звеньев
1, 2, 3 рабочего хода.
будут
углами рабочего и холостого хода
механизма соответственно. На рисунке
6 показаны ход поршня Н
= 0,8м ,
ВН
,СН
, DH
и
ВК,
СК,
DK
- точки,
определяющие крайние положения звеньев
1, 2, 3 рабочего хода.
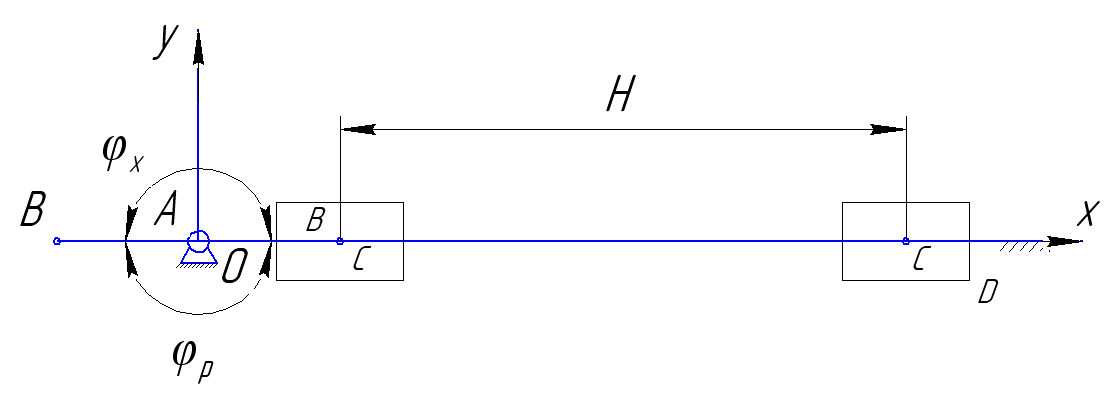
Рис. 6. Определение крайних (мертвых) положений.
МЕТОД ВЕКТОРНЫХ ЗАМКНУТЫХ КОНТУРОВ
Структурную схему механизма располагаем в прямоугольной системе координат, начало которой помещаем в точку А. Со звеньями механизма связываем векторы так, чтобы их последовательность образовала замкнутые контуры ABCA и ABS2A (рис. 7). При образовании контура следует учитывать, что в него должно входить не более двух неизвестных. Углы, определяющие положения векторов, отсчитываем от положительного направления оси Oy против хода часовой стрелки.
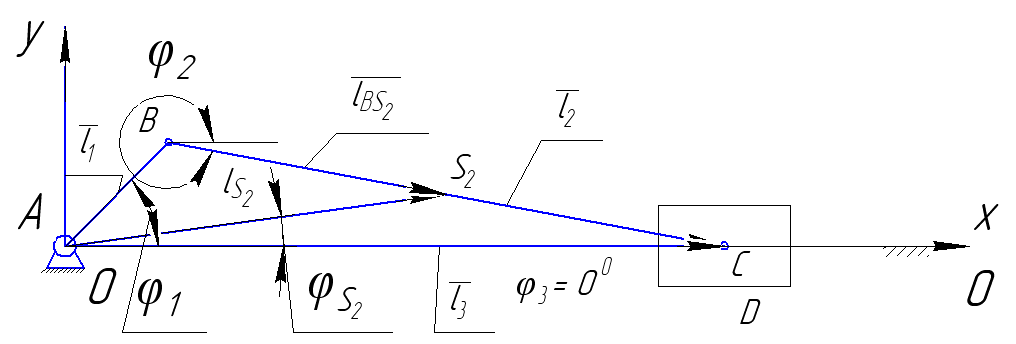
Рис. 7. Построение векторных контуров.
Записываем
уравнение замкнутости контура АBСА
в
векторной форме. Для этого обходим его
периметр, например, в направлении вектора
 причем все векторы, совпадающие с
направлением обхода, ставятся со знаком
«+» и не совпадающие - со знаком «-»:
причем все векторы, совпадающие с
направлением обхода, ставятся со знаком
«+» и не совпадающие - со знаком «-»:
 (22)
(22)
Проецируем (42) на оси ОХ и OY:
 (23)
(23)
Среди
величин, входящих в уравнения (23),
переменными являются
,
 и
и
 .
Угол
является
обобщенной координатой механизма, и
поэтому должен быть задан. Из уравнений
(23) величина
равна:
.
Угол
является
обобщенной координатой механизма, и
поэтому должен быть задан. Из уравнений
(23) величина
равна:
 (24)
(24)
Из
(43):
 (25)
(25)
Кинематические свойства механизма, когда закон движения начального звена еще не известен, находят с помощью кинематических характеристик, называемых аналогами скоростей и ускорений, которые не зависят от времени, а являются функциями обобщенной координаты.
Так как аналоги скоростей и ускорений не зависят от закона изменения обобщенной координаты, принимаем
 и
и
 .
.
Аналитическое определение аналогов скоростей основано на дифференцировании по обобщенной координате уравнений (23). После дифференцирования уравнений (23) получим:
 (26)
(26)
Из
(26) следует, что
 (27)
(27)
Из
(26) следует, что:
 (28)
(28)
Аналитическое определение аналогов ускорений основано на дифференцировании но обобщенной координате уравнений (26):
 (29)
(29)
Из
(29):
 (30)
(30)
Из
(29):
 (31)
(31)
Записываем
уравнение замкнутости контура ABS2A
в
векторной форме:
 (32)
(32)
Проецируем (52) на оси Ox и Oy и определяем координаты центра масс:
 (33)
(33)
Среди
величин, входящих в уравнения (53)
неизвестна только
 ,
равная
,
равная
 ,
так как за центр масс, по условию,
принимаем центр звена.
,
так как за центр масс, по условию,
принимаем центр звена.
Аналог скорости центра масс звена 2 получаем в проекциях на оси координат, дифференцируя по обобщенной координате уравнения (33):
 (34)
(34)
Дифференцируя по обобщенной координате уравнения (34), устанавливаем аналог ускорения центра масс звена 2 в проекциях на оси координат:
 (35)
(35)
Составляем
таблицу (таблица 1; Приложение I) и заносим
в нее значения
,
,
 ,
,
 ,
,
 ,
,
 ,
, ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
Значение
берем
из промежутка
.
Значение
берем
из промежутка
 с шагом в 1°.
с шагом в 1°.
ДИНАМИЧЕСКИЙ АНАЛИЗ МАШИНЫ
Изображаем схему механизма в любом положении, кроме крайних (рис. 8а). Массы сосредотачиваем посередине звена. Обозначаем моменты инерции звеньев относительно центров масс звеньев. Прикладываем силы тяжести. Рисуем индикаторную диаграмму.
Внутри
цикла установившегося движения угловая
скорость начального звена машины
периодически меняется из-за постоянного
изменения нагрузок, что приводит к
нежелательной неравномерности движения.
Неравномерность движения начального
звена характеризуется коэффициентом
неравномерности движения 5, который
не должен превышать допустимого значения
[ ].
Для снижения колебаний угловой скорости
начального звена до допустимых пределов
в машине предусматривают маховик,
который с целью уменьшения его размеров
устанавливают на быстроходном валу.
].
Для снижения колебаний угловой скорости
начального звена до допустимых пределов
в машине предусматривают маховик,
который с целью уменьшения его размеров
устанавливают на быстроходном валу.
При анализе динамики машины и определении момента инерции маховика IM вместо реального механизма рассматривают его одномассовую динамическую модель. Динамическая модель механизма состоит из одного, обычно начального звена, к которому приведены силы, движущие Мд и (моменты) сопротивления МПС, действующие на звенья машины, а также все моменты инерции звеньев In . Начальное звено часто называют звеном приведения (рис. 8б).
Данные к расчёту:
l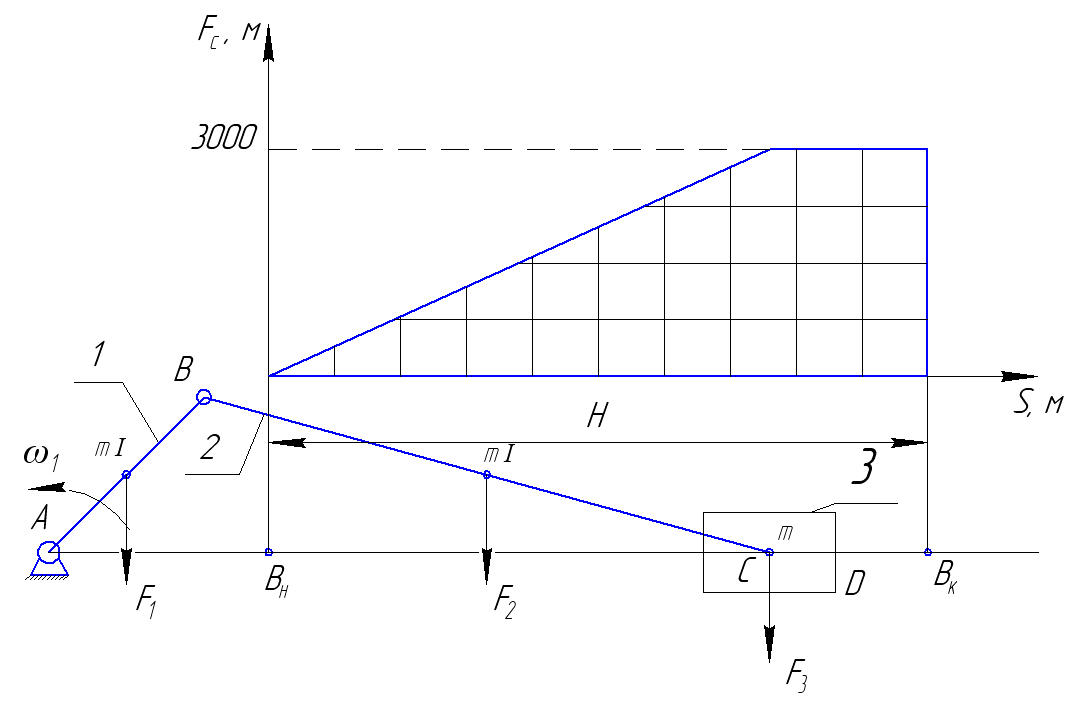 1
=0.2 (м), l2
=0.8 (м),
m1=0.8
(кг), m2=2
(кг), m3=0.5
(кг),
1
=0.2 (м), l2
=0.8 (м),
m1=0.8
(кг), m2=2
(кг), m3=0.5
(кг),
I1=0.032 (кг*м),
I2=0.18 (кг*м)
F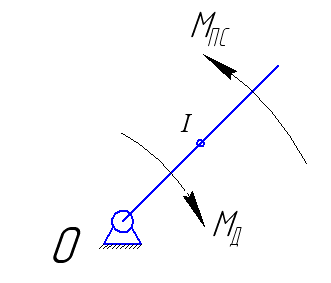 max=
3000 (H)
max=
3000 (H)
а б
Рис. 8. а - схема механизма, б - динамическая модель механизма.