

3. Измерительные схемы с тензорезисторами
Мосты с питанием постоянным током.

Преимущества (2) и недостатки (2). Источники погрешностей.
Достоинства: УПТ нечувствителен к реактивным параметрам, имеет малые размеры и массу. Пропускает как низкие, так и высокие частоты.
Недостатки: большое АП дрейфа входного сигнала, который усиливается. Слабая помехозащищённость от частоты сети f = 50 Гц.
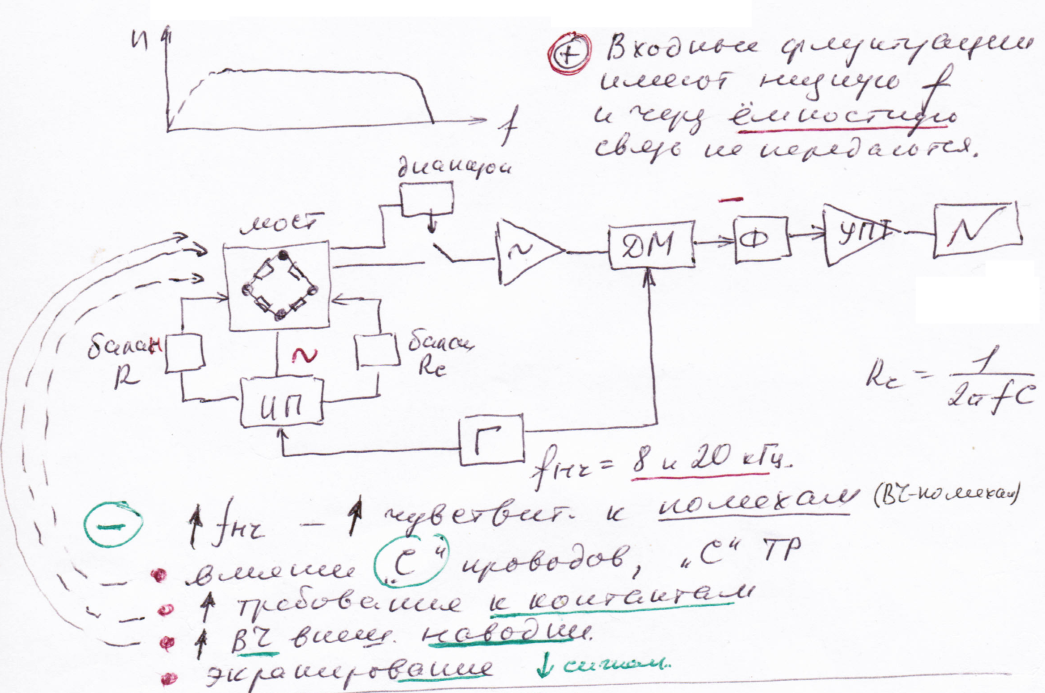
Мосты с питанием переменным током (общая схема). Что является носителем информации в усилителях переменного тока? Преимущества и недостатки усилителей переменного тока.
При
n>3000
не пропускает постоянную составляющую
на входе. Ёмкостная связь
 .
.
Что такое амплитудная модуляция сигнала? Чем обеспечивается фазочувствительность при “восстановлении” модулированного сигнала? Принцип действия этого устройства.
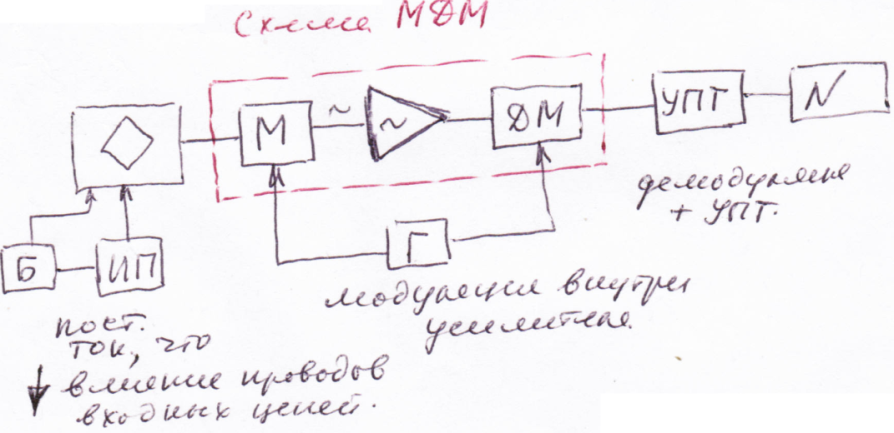
Модуляция – изменение во времени одного или нескольких параметров сигнала – носителя в соответствии с передаваемыми сообщениями.
Комбинированная схема “модуляция- демодуляция” (в чём её преимущества?).

4. Индукционные преобразователи (ип)
Схема работы индукционного преобразователя (ИП) в качестве преобразователя скорости вибрации. За счёт чего происходит изменение выходного сигнала? Что является входной величиной в данном случае?
Индукционные
преобразователи генерируют ЭДС только
при перемещении катушки в магнитном
поле. По этой причине преобразователи
этого типа могут служить для преобразования
линейной скорости в ЭДС на небольших
длинах пути. Обычно они применяются для
измерения скорости вибрации, когда ее
амплитуда не превышает нескольких
сантиметров. Одна из конструктивных
схем
 преобразователя
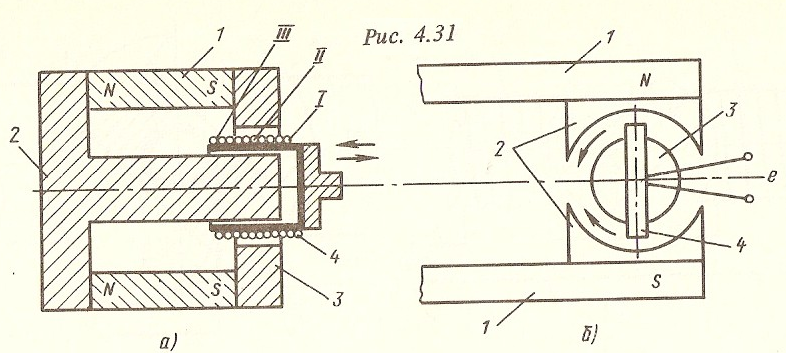
вибрационной скорости показана на рис.
4.31 а. Преобразователь имеет кольцевой
магнит 1, вставленный в стальное ярмо
2. Магнитный поток от постоянного магнита
проходит по центральному цилиндрическому
сердечнику через воздушный зазор и
кольцевой полюсной наконечник 3. В
цилиндрическом воздушном зазоре
находится намотанная на каркас катушка
4. Она может перемещаться в воздушном
зазоре вдоль оси преобразователя.
преобразователя
вибрационной скорости показана на рис.
4.31 а. Преобразователь имеет кольцевой
магнит 1, вставленный в стальное ярмо
2. Магнитный поток от постоянного магнита
проходит по центральному цилиндрическому
сердечнику через воздушный зазор и
кольцевой полюсной наконечник 3. В
цилиндрическом воздушном зазоре
находится намотанная на каркас катушка
4. Она может перемещаться в воздушном
зазоре вдоль оси преобразователя.
Катушку условно можно разделить на три части /—/// (рис. 4.31,а): I — находится вне магнитопровода, и магнитный поток в нее не заходит, II — находится в воздушном зазоре, образованном полюсными наконечниками и цилиндрическим сердечником. Магнитный поток, пронизывающий витки этой части катушки, не меняется во времени, число витков также остается постоянным. В этой части катушки ЭДС не наводится. Часть III катушки находится вне воздушного зазора, но внутри магнитной системы. Магнитный поток, проходящий через витки этой катушки, также постоянен, но при вибрации катушки изменяется число витков. Изменение числа витков приводит к изменению потокосцепления и наводит ЭДС. Витки катушки обычно наматываются равномерно. При этом ЭДС преобразователя пропорциональна скорости вибрации.
Индукционные преобразователи могут применяться и для измерения угловой виброскорости. Схема такого преобразователя показана на рис. 4.31,б. Он состоит из постоянного магнита 1, полюсных наконечников 2, цилиндрического стального сердечника 3 и катушки 4. Устройство преобразователя аналогично устройству магнитоэлектрического измерительного механизма. При повороте катушки вокруг оси сердечника ее потокосцепление изменяется и в ней индуцируется ЭДС, пропорциональная угловой скорости.
ИП в качестве тахометрического преобразователя (синхронного генератора или генератора постоянного тока). Какой физический параметр целесообразно использовать в качестве выходной величины в синхронном тахометрическом преобразователе?
Преобразователи этого типа представляют собой электромашинные генераторы. В качестве примера рассмотрим синхронный преобразователь с вращающимся постоянным магнитом (рис. 432,а): он состоит из статора 1, на котором помещена обмотка, и ротора 2 с закрепленным на нем постоянным магнитом. При вращении магнита изменяется поток, проходящий через обмотку, и в ней индуцируется переменная ЭДС. Амплитуда и частота ЭДС пропорциональны частоте вращения ротора. Частота ЭДС определяется соотношением f = np/60, где n — частота вращения, об/мин; р — число пар полюсов.
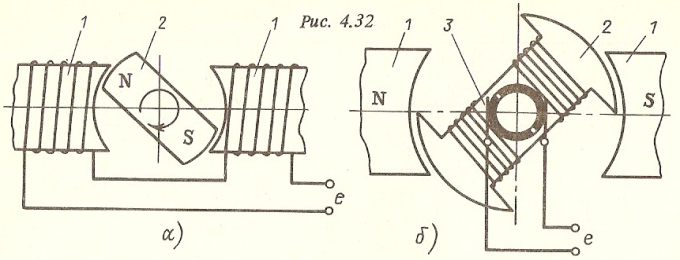
На рис. 4.32,б приведена схема тахометрического преобразователя постоянного тока с возбуждением от постоянного магнита, расположенного на статоре 1. Измерительная обмотка расположена на роторе 2, и при его вращении в ней образуется переменная ЭДС, которая снимается с вращающегося ротора и подается на статор с помощью коллектора 3 и скользящих по нему щеток. При этом переменная ЭДС выпрямляется.
Если
в нагрузке преобразователя течет ток,
то преобразователь отдает в измерительную
цепь некоторую электрическую мощность.
Эта энергия образована из механической.
Механическая мощность
 где
ω — угловая частота вращения ротора; М
— необходимый для этого момент, он
связан с электрической мощностью
соотношением
где
ω — угловая частота вращения ротора; М
— необходимый для этого момент, он
связан с электрической мощностью
соотношением
 где
η — КПД.
где
η — КПД.
Из приведенных соотношений видно, что с увеличением тока, генерируемого преобразователем, увеличивается момент на его валу.
Источники погрешностей, преимущества и недостатки индукционных преобразователей.
Погрешность индукционных преобразователей в значительной степени зависит от режима, в котором они работают. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток. Однако для работы в таком режиме используют наиболее простой вторичный преобразователь. Меньшие погрешности имеют место в режиме холостого хода, когда ток в измерительной катушке практически отсутствует. При работе в таком режиме требуется более сложная и дорогая аппаратура, должны использоваться измерительные механизмы повышенной чувствительности или усилительные устройства. При измерении частоты вращения вала наименьшую погрешность можно получить, если в качестве выходной величины тахометрического преобразователя используется частота изменения ЭДС, а в качестве вторичного преобразователя — цифровой частотомер. При этом исключается влияние нестабильности величины выходного напряжения преобразователя и используется высокая точность цифрового частотомера.
Достоинства: 1. Простота конструкции; 2. Отсутствие необходимости в электропитании; 3. Простота монтажа на двигатель; 4. Невысокая стоимость; 5.Возможность работы в широком интервале температур; 6. Малые размеры; 7. Нечувствительность к загрязнению; 8. Стабильность характеристик.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 8
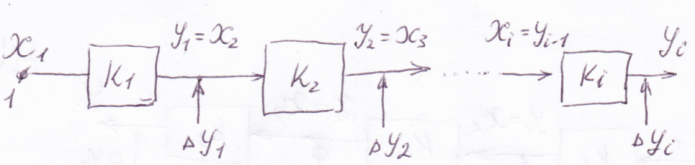
1. Структурные схемы измерительных систем прямого действия (2)
Как определяется коэффициент преобразования при различных видах соединения элементов измерительной системы прямого действия?
Типы
соединения звеньев: последовательное,
параллельное, комбинированное. При
последовательном соединении коэффициент
преобразования
 .
.
В
случае параллельного соединения звеньев


В
случае встречно-параллельного
(комбинированного) соединения звеньев

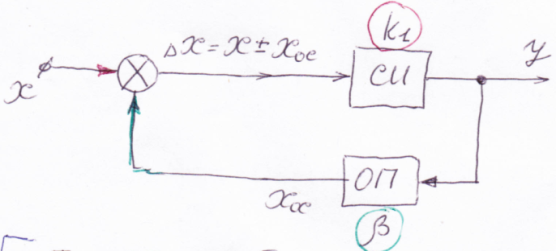
В каких случаях используется тот или иной вид соединения элементов.
Структурная схема выбирается так, чтобы частные погрешности отдельных преобразователей компенсировали друг друга.
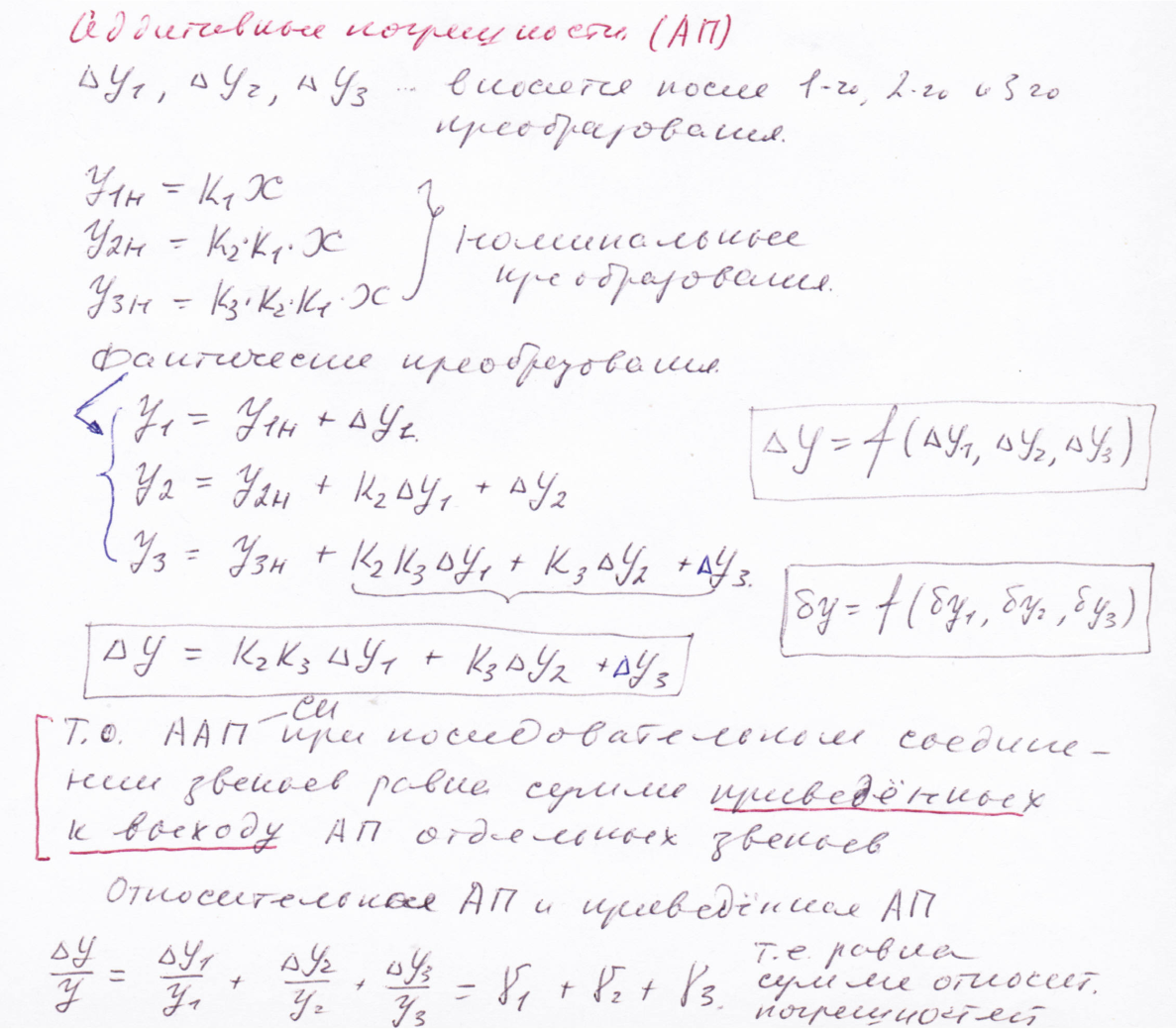
Как определяется при последовательном соединении звеньев суммарная аддитивная и приведённая погрешности?
2. Измерение термо-ЭДС (ТЭДС)
Потенциометрический способ измерения.
Потенциометрические методы основаны на измерении разности потенциалов индикаторного электрода и электрода сравнения или, точнее, электродвижущих сил (ЭДС) различных цепей, поскольку экспериментально измеряется именно ЭДС, являющаяся разностью потенциалов.
Принцип действия потенциометра и порядок работы с ним.
Потенциометр — прибор для определения ЭДС и напряжений компенсационным методом.
Для чего нужен нормальный элемент (НЭ)?
Известно, что при постоянной концентрации электролита и неизменной температуре ЭДС гальванической цепи является весьма стабильной. Это и явилось основанием для создания нормальных элементов (НЭ), применяемых в измерительной технике в качестве рабочих и образцовых мер ЭДС, а также для осуществления первичного эталона единицы напряжения – вольта. Нормальный элемент является обратимым гальваническим элементом, образованным соединением двух полуэлементов, выполненных по определенной схеме гальванической цепи из химически чистых веществ. В зависимости от степени концентрации электролита НЭ, разделяются на насыщенные и ненасыщенные.
Удлиняющие термоэлектроды (УТЭ). Назначение и требования к ним.
При измерении температуры термоэлектрическими термометрами в промышленных условиях необходимо вводить поправку на температуру свободных концов термометра. Свободные концы термоэлектрического термометра стараются удалить от нагретых поверхностей в зону, где может быть установлено специальное устройство для поддержания постоянной температуры свободных концов термометра или установлен прибор, обеспечивающий автоматическое введение поправки.
Эти провода для ряда термометров могут быть изготовлены из тех же материалов, что и термоэлектроды термомётра. В этом случае термоэлектродные провода обладают в области измеряемых температур такой же термоэлектрической характеристикой, как и сами электроды термоэлектрических термометров, с которыми они комплектуются.
Однако при применении некоторых термометров, например из благородных металлов, нельзя ориентироваться на термоэлектродные провода, сделанные из того же материала. Следует отметить, что к термоэлектродным проводам не предъявляется требований жаростойкости, которой должны обладать электроды термометров. Отсюда возникает естественная возможность подыскания для термоэлектродных проводов таких металлов, которые не являлись бы дефицитными и в интервале температур от 0 до 100°С развивали в паре между собой такую же термо-ЭДС как и термоэлектрический термометр, с которым они комплектуются. Принятый интервал температуры достаточен, так как головка термометра в эксплуатационных условиях чаще всего не нагревается выше 60—80°С.
Условия использования УТЭ (2)
Номинальная статистическая характеристика ТЭП получается при tхс = 00С. При tхс ≠ 0 необходимо введение поправки, но для этого температура tхс должна быть const. Для этого необходимо знать температуру и обеспечивать её постоянство.