

3. Измерительные схемы с тензорезисторами
Назначение балансировки. Требуемый диапазон балансировки.
Цель – установка начала отсчёта. Диапазон балансировки должен перекрывать разброс сопротивлений ТР.
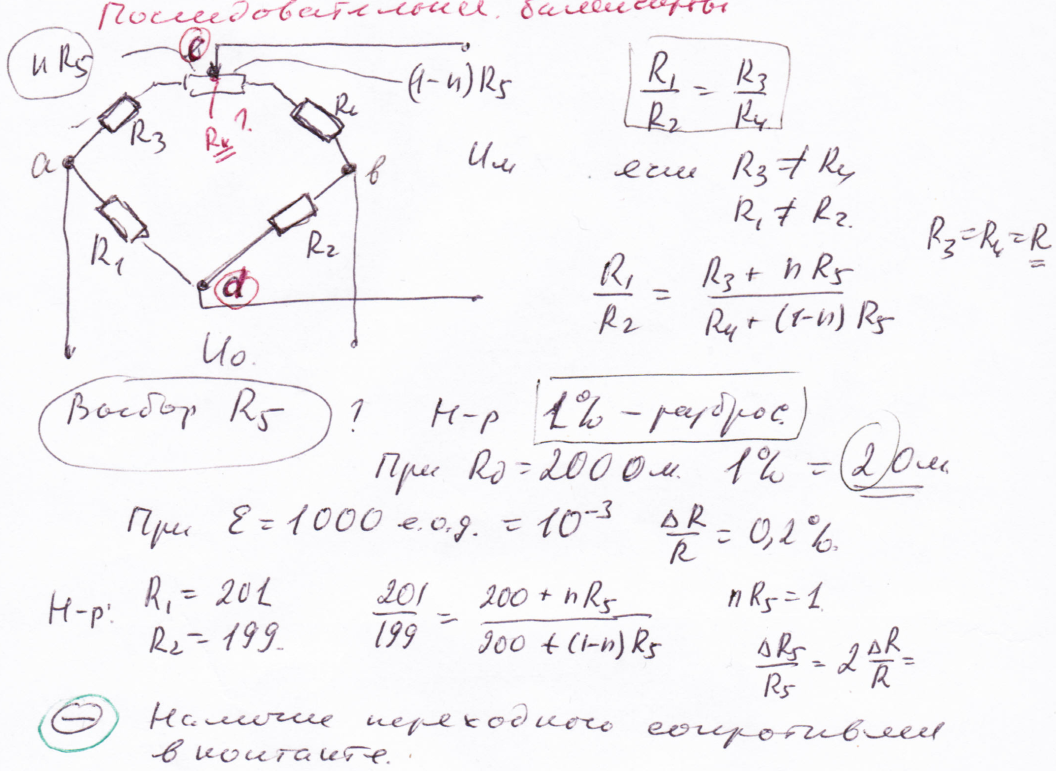
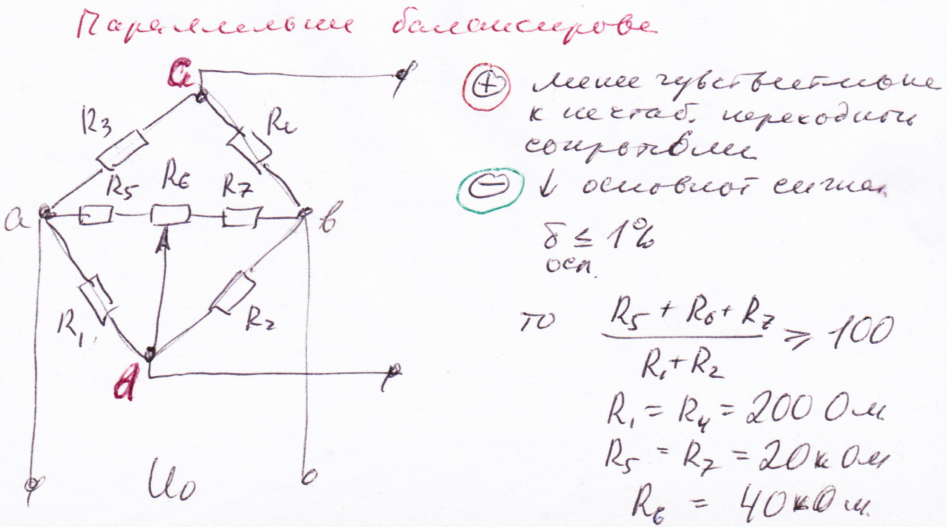
Способы балансировки моста (последовательная и параллельная). Схема системы балансировки изменением напряжения на выходе моста. В чём её преимущества?
Особенности балансировки мостов переменного тока. Какие элементы и почему должны быть включены в неё?
Цель – установка начала отсчёта. Диапазон балансировки должен перекрывать возможный разброс сопротивлений ТР. Балансировка проводится: либо до приложения усилия, либо после предварительной деформации УЭ.
Балансировка
по активной составляющей недостаточна
«С» кабля, проводов,ТР, параллельно
включены в ТР. «С» создаётся в самом ТР.
4. Индукционные преобразователи (ип)
Принцип действия и тип преобразователя по виду естественного выходного сигнала. Устройство. Входная и выходная величина ИП. Выражение для выходной величины.
Индукционным
преобразователем называется
преобразователь, принцип действия
которого основан на законе электромагнитной
индукции. Преобразователь имеет катушку.
При воздействии входной величины на
преобразователь изменяется потокосцепление
Ψ катушки с внешним по отношению к
катушке магнитным шлем. При этом в
катушке наводится ЭДС

П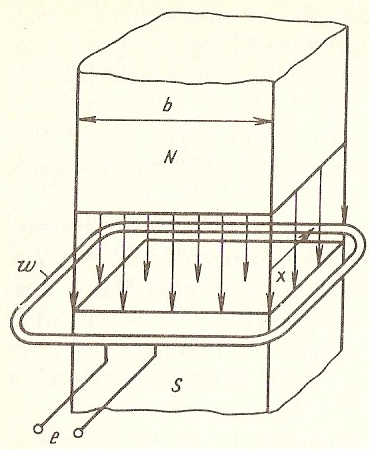 отокосцепление
отокосцепление
 где w
— число витков катушки; Ф — проходящий
через нее поток; Q
— площадь, через которую проходит этот
поток; В — индукция магнитного поля.
ЭДС в катушке может наводиться при
изменении во времени любой из перечисленных
величин w.
В, Q.
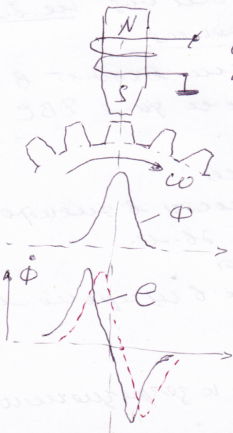
В качестве примера рассмотрим
преобразователь, который представляет
собой магнитную систему с постоянным
магнитом, в воздушном зазоре которой
перемещается катушка. При движении
катушки с изменением х изменяется
площадь катушки, находящейся в магнитном
поле, Q
= bх.
Это приводит к изменению потокосцепления
Ф = wBbx,
и в катушке наводится ЭДС
где w
— число витков катушки; Ф — проходящий
через нее поток; Q
— площадь, через которую проходит этот
поток; В — индукция магнитного поля.
ЭДС в катушке может наводиться при
изменении во времени любой из перечисленных
величин w.
В, Q.
В качестве примера рассмотрим
преобразователь, который представляет
собой магнитную систему с постоянным
магнитом, в воздушном зазоре которой
перемещается катушка. При движении
катушки с изменением х изменяется
площадь катушки, находящейся в магнитном
поле, Q
= bх.
Это приводит к изменению потокосцепления
Ф = wBbx,
и в катушке наводится ЭДС

Индукционные преобразователи служат для преобразования линейной dx/dt или угловой dα/dt скорости перемещения катушки относительно магнитного поля в ЭДС. Они являются генераторными преобразователями и преобразуют механическую энергию в электрическую.
Согласно
закону электромагнитной индукции, ЭДС
наводимая в контуре, определяется
выражением:
 .
Таким образом, входной величиной является
измеряемая скорость линейного или
углового перемещения, а выходной ЭДС,
индуцированная в катушке в результате
изменения потокосцепления.
.
Таким образом, входной величиной является
измеряемая скорость линейного или
углового перемещения, а выходной ЭДС,
индуцированная в катушке в результате
изменения потокосцепления.
Схема работы ИП в режиме генератора импульсов. В каких средствах измерения используется данный принцип?
ИП в режиме генератора импульсов называется импульсным тахометром. Вторичным прибором является частотомер. Такие преобразователи входят в состав современных систем управления ДВС.
Погрешности ИП. В таком режиме работы.
Таким образом, погрешность индукционных преобразователей в значительной степени зависит от режима, в котором они работают. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток. Однако для работы в таком режиме используют наиболее простой вторичный преобразователь. Меньшие погрешности имеют место в режиме холостого хода, когда ток в измерительной катушке практически отсутствует. При работе в таком режиме требуется более сложная и дорогая аппаратура, должны использоваться измерительные механизмы повышенной чувствительности или усилительные устройства.
При измерении частоты вращения вала наименьшую погрешность можно получить, если в качестве выходной величины тахометрического преобразователя используется частота изменения ЭДС, а в качестве вторичного преобразователя — цифровой частотомер. При этом исключается влияние нестабильности величины выходного напряжения преобразователя и используется высокая точность цифрового частотомера.
Почему индукционные преобразователи не могут использоваться в качестве датчика фазы (датчика углового положения распределительного вала)?
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 7
1. Статические характеристики измерительных устройств
Статическая характеристика СИ – функциональная зависимость выходного сигнала (у) от входного (х) в статическом режиме. Более точно: зависимость информативного параметра выходного сигнала от информативного параметра входного сигнала в статическом режиме.
Основные группы метрологических характеристик СИ и их представление (4…5).
Свойства средств измерений оценивают характеристиками, среди которых выделяют комплекс метрологических характеристик, т. е. характеристик, которые необходимы при оценке точности результатов измерений.
К метрологическим характеристикам средства измерений относятся динамические характеристики, т. е. характеристики инерционных свойств средства, определяющие зависимость выходного сигнала средства измерений от меняющихся во времени величин: параметров входного сигнала, внешних влияющих величин, нагрузки.
П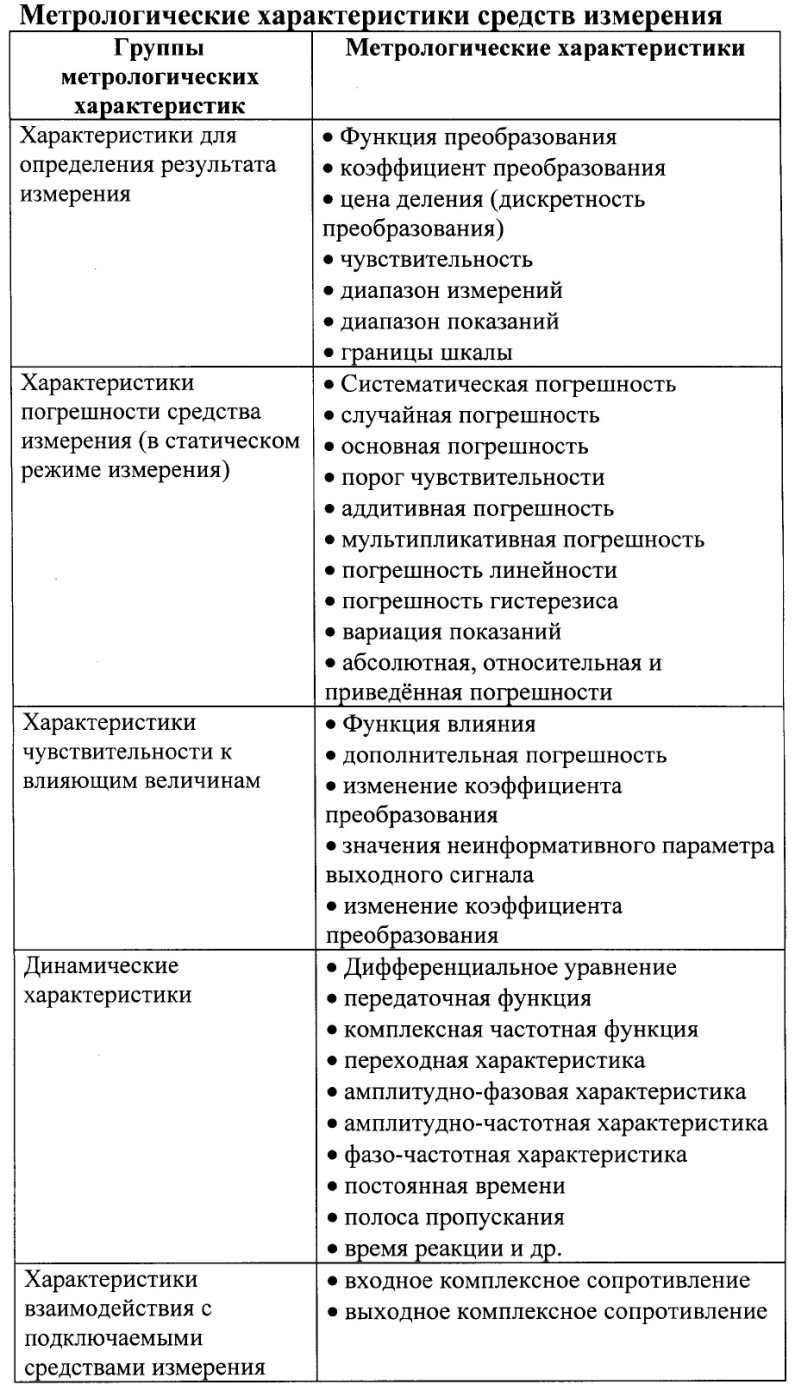 олная
динамическая характеристика
— характеристика, однозначно определяющая
изменения выходного сигнала средства
измерений при любом изменении во бремени
информативного или неинформативного
параметра входного сигнала, влияющей
величины или нагрузки.
олная
динамическая характеристика
— характеристика, однозначно определяющая
изменения выходного сигнала средства
измерений при любом изменении во бремени
информативного или неинформативного
параметра входного сигнала, влияющей
величины или нагрузки.
Частная динамическая характеристика не отражает полностью динамических свойств средства измерений. К частным динамическим характеристикам аналоговых средств измерений, которые можно рассматривать как линейные, относят любые функционалы или параметры полных динамических характеристик.
Для измерительных приборов время реакции — время установления показаний прибора, т. е. время от момента скачкообразного изменения измеряемой величины до момента установления с определенной погрешностью показания, соответствующего установившемуся значению измеряемой величины.
Для измерительных преобразователей время реакции — время установления выходного сигнала, определяемое при скачкообразном изменении входного сигнала и заданной погрешности установления выходного сигнала.
Коэффициент демпфирования — параметр дифференциального уравнения второго порядка, описывающего линейное средство измерений
Способы нормирования погрешностей средств измерений (4…5).
Установление номинальных значений и границ допускаемых отклонений реальных метрологических характеристик средств измерений от их номинальных значений – нормирование метрологических характеристик.
Характеристики, предназначенные для определения результатов измерений (без введения поправки):
функция (статическая характеристика) преобразования измерительного преобразователя, а также измерительного прибора с неименованной шкалой;
значение однозначной или значения многозначной меры;
цена деления шкалы измерительного прибора или многозначной меры;
вид выходного кода, число разрядов кода, цена единицы наименьшего разряда кода цифровых средств измерений.
Характеристики погрешностей средств измерений:
характеристики систематической составляющей погрешности;
характеристики случайной составляющей погрешности;
характеристики погрешности.
Характеристики чувствительности средств измерений к влияющим величинам:
функции влияния;
изменения значений метрологических характеристик средств измерений, вызванных изменениями влияющих величин в установленных пределах.
Динамические характеристики средств измерений:
полная;
частные.
Характеристики взаимодействия средств измерений с объектом исследования и нагрузкой:
входное полное сопротивление;
выходное полное сопротивление.
Неинформативные параметры выходного сигнала средств измерений.
Понятие о нормирующих преобразователях. Их назначение.
Нормирующие измерительные преобразователи предназначены для преобразования выходного сигнала первичных преобразователей (стандартных термоэлектрических термометров и термометров сопротивления) и выходного сигнала переменного тока измерительных устройств (дифманометров, манометров и других приборов) в унифицированный сигнал постоянного тока. Нормирующие преобразователи, применяемые для преобразования выходного сигнала первичных преобразователей, называют также промежуточными.
2. Термоэлектрические преобразователи (ТЭП) или термопары
Принцип действия и основные определения.
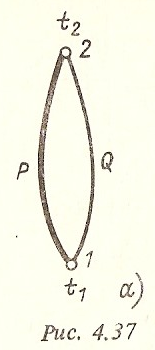
Термоэлектрический
преобразователь представляет собой
термопару, состоящую из двух разнородных
проводников Р и Q, соединенных между
собой в двух точках, как схематически
показано на рис. 4.37,a. На границе раздела
двух различных металлов имеется
контактная разность потенциалов EРQ
(t),
зависящая от рода металлов и от температуры
контакта. В цепи, показанной на рис.
4.37, а, контактные разности потенциалов
образуются в точках 1 и 2. Если t1
= t2,
то они равны между собой и, будучи
противоположно направленными, взаимно
уравновешиваются. Если же t1
≠ t2,
то в цепи развивается результирующая
ЭДC
 называемая термоэлектродвижущей силой
(термо-ЭДС). Места контактов называются
спаями термопары.
называемая термоэлектродвижущей силой
(термо-ЭДС). Места контактов называются
спаями термопары.
Основные отличия от термометров сопротивления (ТС). Преимущества и недостатки, а также область применения сравнительно с ТС.
Термопара (ТП) образуется из 2-х проводников А и В, два спая которых находятся при разных температурах Т1 и Т2. В результате между спаями возникает ТЭДС, значение которой зависит от материалов и разности температур.
ТЭП относится к числу генераторных преобразователей.
Преимущества: Не требует электропитания. Прост в изготовлении. Отсутствует само-разогрев, характерный для ТС. Имеет малые размеры. Низкая инерционность. Возможность непосредственного измерения температур.
Недостатки: Необходимость точного измерения txc. Нелинейность характеристик в широком диапазоне (значений больше чем у ТС). Низкая чувствительность по сравнению с ТС.
Термоэлектрические эффекты Пельтье (1834)
Заключается в том, что при контактном соединении двух различных, но однородных проводников А и В с одинаковой температурой, но различными плотностями электронов в оболочке атомов, происходит перетекание электронов из более плотной зоны в менее плотную. В результате появляется ТЭДС.
Томсона
Заключается в выделении или поглощении теплоты в однородном проводнике при наличии в нём градиента температуры, причём дополнительно к теплу.
Зеебека
В электрической цепи, состоящей из двух разнородных проводников, возникает ТЭДС, если константы этих проводников находятся при разных температурах.
Закон Вольта для изотермической цепи. Закон последовательных металлов.
Если контактирующие проводники имеют одинаковую температуру, то разность потенциалов, возникающая при контакте 2х любых проводников, равна сумме разностей потенциалов, при попарном контактировании каждого из них с любым из проводников, расположенных в ряду Вольта между данными проводниками.
Таким образом, использую таблицы, составленные для ТЭП (пар), образованных в паре с эталонным металлом (Pt), можно найти ТЭДС для ТЭП, составленных из 2х любых металлов.
Закон последовательных температур.
Табличные значения ТЭДС любой термопары приведены для температуры свободных концов (tхс = 0). Если же t0 ≠ 0, то вводят поправку для приведения полученного значения ТЭДС к стандартной температуре t0.
Следовательно,
для приведения измеренного значения
ТЭДС с tхс
= t1
к значению ТЭДС при стандартной
температуре t0
следует к измеренному значению
 прибавить поправку
прибавить поправку
 ,
которая представляет собой ТЭДС термопары
такого же типа, но с температурой рабочего
конца t1
и температурой свободных концов t0.
,
которая представляет собой ТЭДС термопары
такого же типа, но с температурой рабочего
конца t1
и температурой свободных концов t0.
Закон последовательности металлов позволяет измерять ТЭДС с помощью электрической цепи, проводники которой по своим тепло-электронным свойствам отличаются от проводников данной ТП.
Закон промежуточных металлов. Выводы из них.
Если в цепь ТЭП включить один или несколько однородных проводников из другого металла, с одинаковыми температурами на концах, то не зависимо от тепло-электронных свойств этих проводников, их наличие в этом случае не повлияет на величину ТЭДС.