

Добавил:
Studfiles2
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Сокращенный конспект лекций / 2008-03-21-01-49-Елена- ТАУ.doc
Б. Активные четырёхполюсники.
Общая схема такого четырёхполюсника представлена на рисунке:
В активных четырёхполюсниках используется
операционные усилители с очень большим
коэффициентом усиления, поэтому
передаточная функция четырёхполюсника
с достаточной точностью равна:
активных четырёхполюсниках используется
операционные усилители с очень большим
коэффициентом усиления, поэтому
передаточная функция четырёхполюсника
с достаточной точностью равна:
![]()
Активные четырёхполюсники удаётся выполнять так, что они осуществляют почти идеальное дифференцирование или интегрирование, тем более в ограниченном диапазоне частоты.
Например:


где T1= R2C1; T2= R1C1.
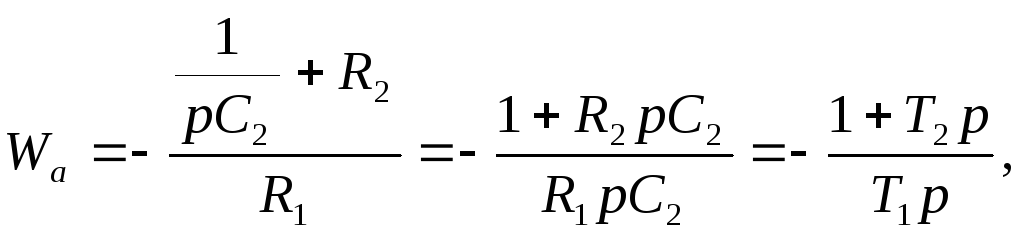

где T2= R2C2; T1= R1C2.