

Курсовик по теории управления / КУРСАЧ ОАУ / %D4%F3%ED%EA%F6%E8%EE%ED%E0%EB%FC%ED%E0%FF %F1%F5%E5%EC%E0 %D1%C0%D3
.doc2. Статический расчёт САУ.
Функциональная схема САУ.
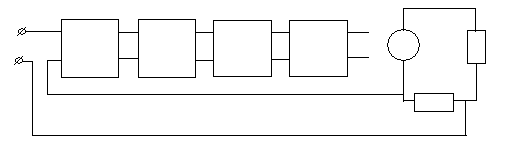
Ф АР ЭУ В Г R
Rш
Ф – фильтр
АР – автоматический регулятор
ЭУ – элемент управления
В – возбудитель
Г – генератор постоянного тока
Найдём математическое описание элементов САУ. Для этого зададим Uз=3В и рассчитаем W(S) всех элементов.
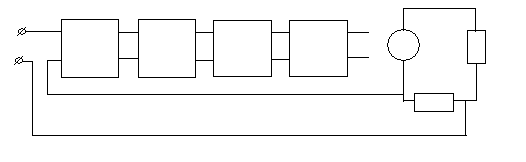
Г
Ф АР ЭУ В R
Rш
После прохождения сигнала через генератор с Кг=150А/В, Iн=30000 А, значит на входе было Uг=30000А/150А/В=200В; после прохождения сигнала через возбудитель с Кв=1.5, значит Uв=200В/1.5=133В;
т.к. Кф=1, а АР численно сигнал не изменяет, то Uэу=3В, тогда Кэу=133В/3В=44.3;
отсюда математические описания элементов выглядят след. обр.:
Wф(S)=1/(1+0.15S); Wэу(S)=44.3; Wв(S)=1/(1+0.3S);
Wг(S)=[150*0.0001]/[(2S+1)(5S+1)]=0.015/(10S2+7S+1);
Wар(S)=Кар/S
Найдём статическую ошибку, ε=Iн*0.5%/m, ε=30000*0.005/20=7.5;
ε=∆I/(1+Кп), Кп=∆I/ε -1, Кп=30000*0.15/7.5 – 1=599
Кп=Кф*Кар*Кэу*Кв*Кг*Кш, тогда:
Кар=Кп/(Кф*Кэу*Кв*Кг*Кш), Кар=599/(1*44.3*1.5*150*0.0001)=599, тогда
Wар(S)=599/S
3.Динамический расчёт САУ.
С помощью Classic построим характеристики исходной системы.
Структурная схема имеет следующий вид:
 Вход
Выход
Вход
Выход
Ф АР ЭУ В Г ОС
ОС – отрицательная обратная связь, Wос(S)=-1/1


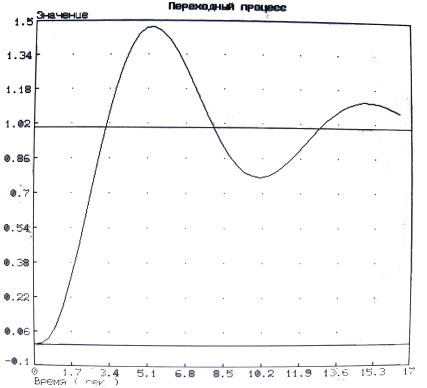
В характеристическом уравнении системы есть пара комплексных корней с положительной вещественной частью. По рисунку видно что переходный процесс расходящийся, следовательно, исходная САУ – неустойчива и необходима коррекция.
Структурная схема САУ со звеном коррекции имеет следующий вид:
 Вход
Выход
Вход
Выход
Ф АР КУ ЭУ В Г ОС
КУ – корректирующее устройство (на схеме варьируемое звено).
Для исходной системы:

Для скорректированной системы:

Wку(S)=(1+116S+661S2)/(1+55000S+661S2)
|
Исходные полюса |
0.204 |
0.493 |
3.26 |
6.74 |
|
Добавленные полюса |
0.0000182 |
83.2 |
|
Добавленные нули |
0.00912 |
0.166 |
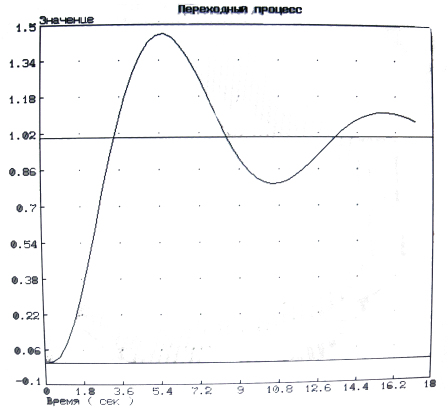
Характеристики скорректированной системы:

Скорректированная система устойчива, т.к. нет ни одного корня с положительной вещественной частью, а также из критерия Найквиста, ωср< ωπ, точка пересечения фазовой характеристики с линией -1800 должна быть правее частоты среза. И как видно из графика, переходный процесс сходящийся, tр=17с.
4. Синтез коррекции.
Реализуем физически корректирующее устройство:
Wк(S)=(1+116S+661S2)/(1+55000S+661S2)
Wк(S)=[661(S+0.1664)(S+0.0091)]/[661(S+83.2072)(S+0.000018)]
Wк(S)=[(6.0096S+1)(109.8901S+1)]/[0.012S+1)(55555.5556S+1)]
Асимптотическая ЛАЧХ:
L, дБ
0.0000182 0.00912 0.166 83.2
ω, рад/с
-20 +20
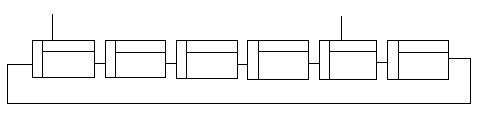
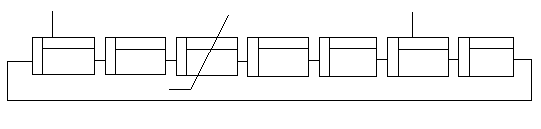
Из таблицы видно что для нашего корректирующего устройства применима следующая схема:
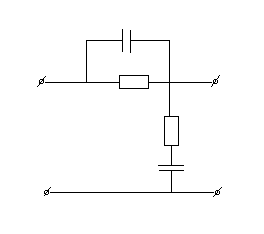
C2
R2
Uвх R1 Uвых
C1
Т1=R1*C1; Т2=R2*C2; α=R1/(R1+R2)
Т1=109.8901; Т2=6.0096; Т1/α=55555.5556; α*Т2=0.012
Рассчитаем параметры данной RC-цепи:
R

 1*C1=109.8901
R1*C1=109.8901
α=0.001978
1*C1=109.8901
R1*C1=109.8901
α=0.001978
R2*C2=6.0096 R2*C2=6.0096 R1/(R1+R2)=0.001978
T1/α=55555.5556 α=T1/55555.5556 R1*C1=109.8901
α*T2=0.012 α=R1/(R1+R2) R2*C2=6.0096



R1/0.001978=R1+R2 R2/R1=504.561 R1=R2/504.561
R1*C1=109.8901 R1*C1=109.8901 C1=109.8901/R1
R2*C2=6.0096 R2*C2=6.0096 C2=6.0096/R2
Пусть R2=8.2 МОм, тогда R1=16.25 кОм, С1=6.762 мФ, С2=0.733мкФ.
Возьмём теперь номинальные значения элементов, близкие к нашим и сделаем проверку, проконтролировав как сильно изменятся характеристики системы:
R1*=16.2 кОм, R2*=8.2 МОм, С1*=6.8 мФ, С2*=0.68 мкФ, тогда
Т1*=110.16, Т2*=5.576, α*=0.001972
Т1*/α*=55862.069, α* * Т2*=0.011
Wк*(S)=[(5.576S+1)(110.16S+1)]/[(0.011S+1)(55862.069S+1)]
Wк*(S)=[661(S+0.17934)(S+0.0091)]/[661(S+90.9091)(S+0.000018)]
Wк*(S)=(1.07+124S+661S2)/(1.08+60090S+661S2)
Видно, что значения Т1, Т2, α, и график переходного процесса расходятся очень мало, а значит взятые нами элементы и их значения нас устраивают и применимы для реализации корректирующего устройства, считая что параметры системы не изменяются:
R1=16.2 кОм, R2=8.2 МОм, С1=6.8 мФ, С2=0.68 мкФ
5. Список используемой литературы.
-
Фатеев А.В., Вавилов А.А., Смольников Л.П., Солодовников А.И., Яковлев В.Б. «Расчёт автоматических систем». Учебн. пособие для вузов. М., «Высшая школа», 1973.
-
Попов Е.П. «Теория линейных систем автоматического регулирования и управления». М., 1978.
-
Конспект лекций по курсу «Основы автоматического управления». Солодовников А.И.