

Глава 23 фазовые радионавигационные системы
23.1 ПРИНЦИП ДЕЙСТВИЯ ФАЗОВЫХ РНС
23.1.1 Общая характеристика фазовых радионавигационных систем
Фазовыми радионавигационными системами называются такие системы, которые для определения места подвижного объекта используют информацию, содержащуюся в фазе сигнала. Определение навигационного параметра в фазовой радионавигационной системе основано на использовании аналитических зависимостей, связывающих фазу с навигационным параметром:
![]() (23.1)
(23.1)
где Р — навигационный параметр;
![]() — фаза.
— фаза.
Эта связь может быть установлена на основе зависимости, описывающей напряженность электрического поля радиоволн с помощью синусоидальной или косинусоидальной функций.
А
Судно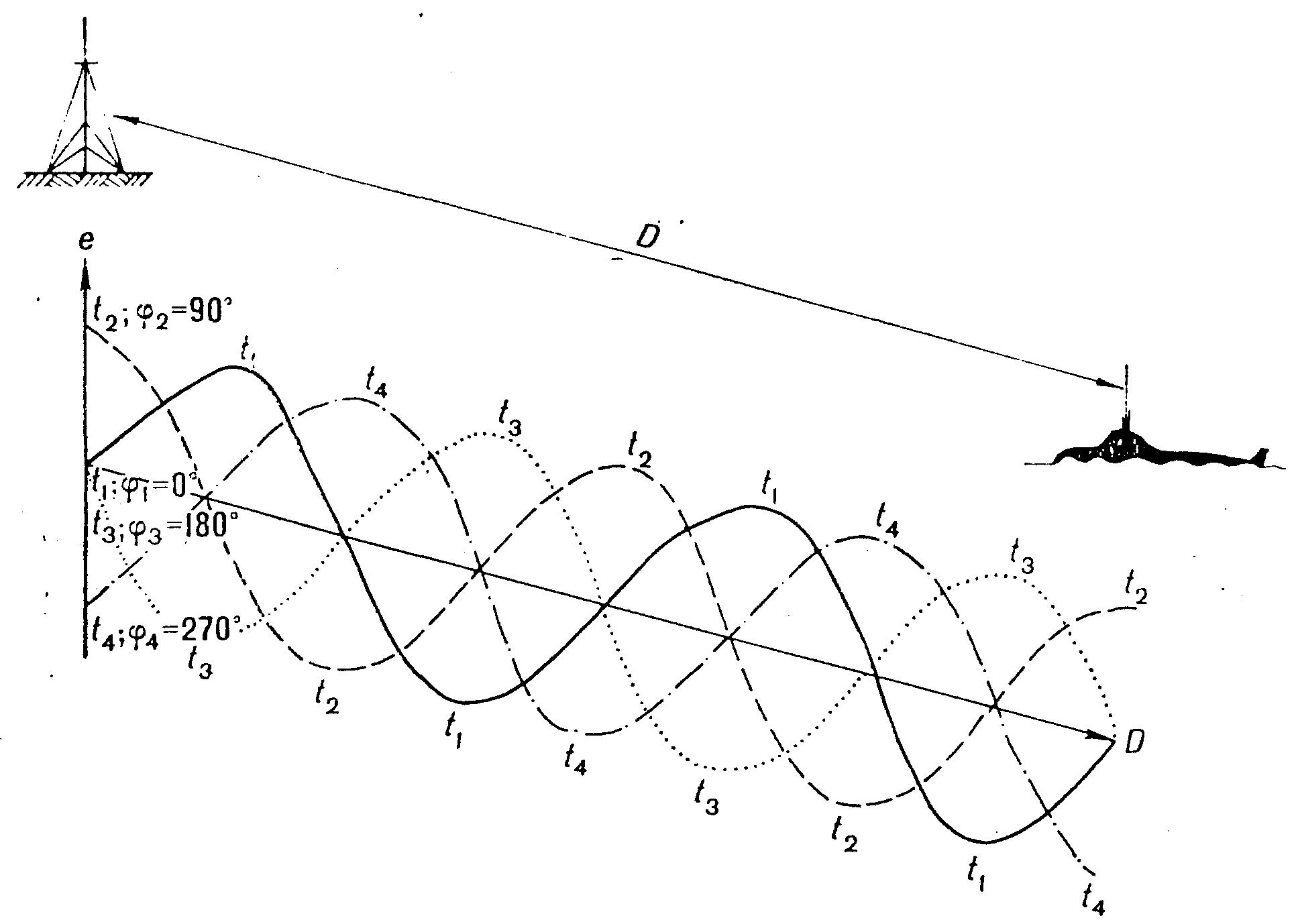
 ргумент
этой функции
ргумент
этой функции
![]() представляет собой фазу гармонического
колебания и характеризует состояние
колебания в определенный момент времени
ti.
На рис. 23.1 показаны различные состояния
колебания, распространяющегося на
участке D в разные моменты времени
t1,
t2,
t3,
t4.
представляет собой фазу гармонического
колебания и характеризует состояние
колебания в определенный момент времени
ti.
На рис. 23.1 показаны различные состояния
колебания, распространяющегося на
участке D в разные моменты времени
t1,
t2,
t3,
t4.
Рис. 23.1
Состояние колебаний на участке распространения D в разные моменты времени
Фазовые измерения (при использовании сравнительно простых технических средств) позволяют обеспечить наибольшую точность определения навигационного параметра, поэтому фазовый метод измерений в настоящее время нашел широкое применение при создании радионавигационных систем высокой точности.
Впервые фазовый метод радионавигационных измерений был изобретен и применен на практике в СССР академиками Л.И. Мандельштамом, Н. Д. Папалекси и Е. Я. Щеголевым в 1934 году. Построенный ими фазовый дальномер, на который был получен патент, явился толчком к проведению целого ряда исследовательских и опытно-конструкторских работ. В результате этих работ фазовый метод измерений получил широкое развитие и был положен в основу работы целого ряда радионавигационных систем, используемых для обеспечения судовождения.
Работа фазовых систем основана на свойстве радиоволн распространяться от передатчика к приёмнику в первом приближении с постоянной скоростью и по кратчайшим расстояниям.
При распространении
радиоволн из точки А в точку Б
происходит «фазовый набег» или
запаздывание радиосигнала по фазе на
величину
![]() (рис. 23.2)
(рис. 23.2)
![]() , (23.2)
, (23.2)
где tАБ — время распространения сигнала от точки А до точки Б (tАБ= tА – tБ);
f — частота излучаемых колебаний;
v — фазовая скорость распространения радиоволн.
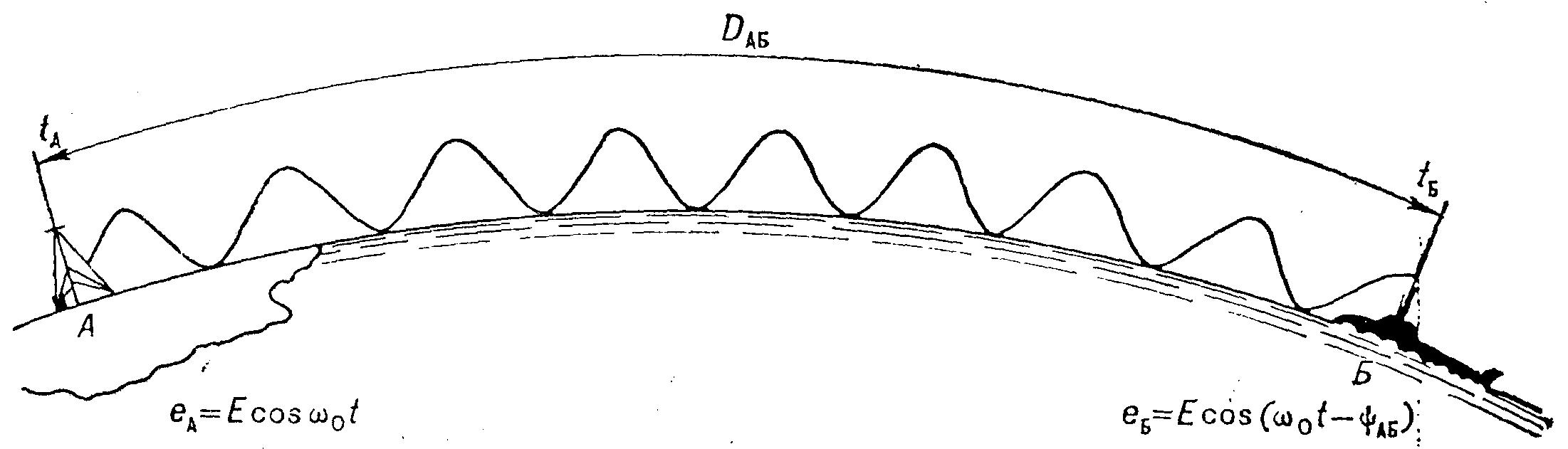



Рис. 23.2. Запаздывание по фазе при распространении колебаний
При этом
электромагнитное поле в точке А
характеризуется выражением
![]() ,
а в точке Б соответственно
,
а в точке Б соответственно
![]()
Зависимость (23.2), связывающая значения фазы, расстояния и фазовой скорости, положена в основу построения фазовых дальномерных и разностно-дальномерных радионавигационных систем, которые наиболее широко используются на практике.
Для двух гармонических
функций может быть введено понятие
сдвига фаз
![]() ,
обусловленного разностью фаз двух
колебаний:
,
обусловленного разностью фаз двух
колебаний:
![]() (23.3)
(23.3)
Тогда сдвиг фаз
![]() , (23.4)
, (23.4)
где
![]() .
.
Р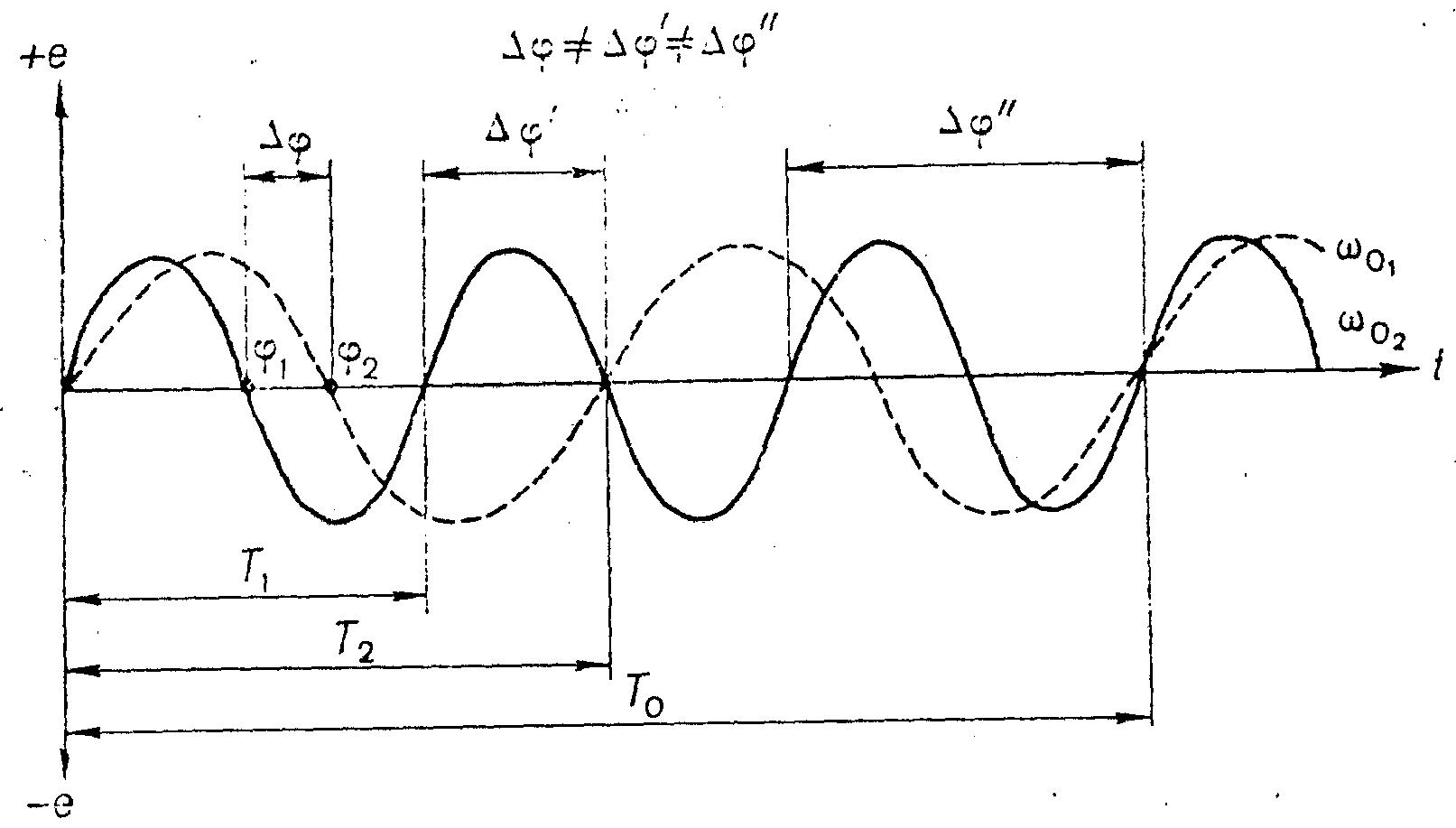 ис.
23.3. Разность фаз колебаний разных частот
ис.
23.3. Разность фаз колебаний разных частот
Таким образом, у
колебаний с разными частотами
![]() сдвиг фаз является функцией времени t
и круговой частоты
,
т. е.
сдвиг фаз является функцией времени t
и круговой частоты
,
т. е.
![]() .
.
Фазовый сдвиг непрерывно изменяется, и если при этом сравниваемые колебания когерентны, то в процессе изменения значения фазового сдвига будут повторяться через общий временной период Т0 (рис. 23.3).
Поэтому под
разностью фаз колебаний с разными
частотами понимают одну из мгновенных
разностей фаз, выраженных в долях общего
периода Т0. На практике
удобно разностью фаз двух колебаний
считать наименьшую мгновенную разность
фаз между началами колебаний,
принимая за начало колебаний момент
перехода синусоиды через нулевое
значение в положительном направлении.
Эту разность фаз можно выразить не
только в долях периода Т0,
но и в долях периода колебаний
![]() и
и
![]() или какой-либо другой частоты сравнения.
Для приведения колебаний к одной частоте
в процессе измерений используют
масштабные коэффициенты, на которые
умножают фазы сравниваемых колебаний.
или какой-либо другой частоты сравнения.
Для приведения колебаний к одной частоте
в процессе измерений используют
масштабные коэффициенты, на которые
умножают фазы сравниваемых колебаний.
Если колебания
имеют одинаковую частоту
![]() ,
то с учетом формулы (23.4) сдвиг фаз равен
сдвигу начальных фаз колебаний (рис.
23.4)
,
то с учетом формулы (23.4) сдвиг фаз равен
сдвигу начальных фаз колебаний (рис.
23.4)
![]() (23.5)
(23.5)

Рис. 23.4. Разность фаз колебаний одинаковых частот
В радионавигационных
системах измеряют разность начальных
фаз колебаний
![]() принимаемого сигнала
принимаемого сигнала
![]() и вспомогательного сигнала
и вспомогательного сигнала
![]() (опорного), выполняющего роль начальной
точки отсчета фазы. Тогда формула (23.5)
примет вид:
(опорного), выполняющего роль начальной
точки отсчета фазы. Тогда формула (23.5)
примет вид:
![]() (23.6)
(23.6)
Для удобства
описания фазовых соотношений принимают
![]() тогда
тогда
![]() .
.
Простейшим видом
фазовых систем являются системы, у
которых информация содержится в фазе
несущей частоты гармонического сигнала,
т. е. сигнал модулируется по фазе функцией
![]() .
.
В этом случае сигнал описывается выражением, имеющим следующий вид:
![]() .
.
Если известна
функция
и если, принять, что
![]() и
,
то после демодуляции на выходе
фазоизмерителя
и
,
то после демодуляции на выходе
фазоизмерителя
![]() =
=
![]() .
.
В общем случае сигнал может иметь и дополнительную модуляцию:
![]() ,
,
где
![]() и
и
![]() — детерминированная функция времени.
— детерминированная функция времени.
Измеряемая разность фаз колебаний выражается, как правило, в частях периода колебаний (долях фазового цикла) или в градусах. С помощью современных фазоизмерительных устройств можно выполнять измерения с инструментальными погрешностями значительно меньшими 1°, однако несовершенство методов учета влияния погрешностей от других источников обусловливает целесообразность использования в РНС фазоизмерителей, имеющих точность ~1/100 периода (0,01 ф. ц.). Важным достоинством фазовых измерений является то, что с их помощью могут быть измерены весьма малые промежутки времени. Например, при использовании радиоволн сантиметрового диапазона даже при низкой точности измерений (0,1 ф. ц.) запаздывание одного колебания относительно другого может быть измерено с погрешностью 10-11 с, что значительно, точнее, по сравнению с импульсным методом измерений.
Таким образом, использование фазы сигнала в радионавигационных измерениях позволяет получить наиболее высокие точности определения навигационных параметров (расстояний, разности расстояний, углов и т.д.).
Фазовые радионавигационные и радиогеодезические разностно-дальномерные и дальномерные системы способны обеспечить минимальные погрешности при определении места судна, а также при выполнении специальных работ, требующих определения места с высокой точностью.
Новые возможности использования фазы сигнала определились в связи с применением сложных, многочастотных, шумоподобных сигналов. В закон изменения фазы этих сигналов может быть заложена информация, использование которой позволит наиболее эффективно выделять сигналы из помех, обеспечивать высокую помехоустойчивость против организованных помех.
Наряду с использованием в радионавигации и радиогеодезии фазовый метод измерений получил значительное развитие в системах траекторных измерений космических объектов. Таким образом, фазовые системы могут иметь различное назначение, а следовательно, и соответствующее конструктивное решение.
Поскольку инструментальная точность в современных фазовых системах может быть очень высокой, то одной из самых важных проблем является обеспечение точного знания фазовой скорости распространения радиоволн vф. При этом в общем случае погрешность навигационного, параметра из-за незнания точного значения скорости должна быть меньше или соизмерима с инструментальными погрешностями. Поэтому реальная точность фазовых радионавигационных систем зависит в основном от умения предвычислять и учитывать погрешности, связанные с изменением фазовой скорости при распространении сигналов над неоднородной подстилающей поверхностью Земли, при отражении от ионосферы, дифракции вокруг выпуклости Земли и рефракции в нижних слоях атмосферы. Развитие теории распространения радиоволн и методов учета влияния условий распространения на фазовую скорость позволяет во многих случаях ограничить указанные выше погрешности до 10-4—10-7 по дальности и 0,01° по углу.
Важной проблемой фазовых систем является обеспечение их работы при наличии помех. Эта проблема в настоящее время решается на основе методов статистической радиотехники, использование которых позволяет исследовать статистические характеристики смеси сигнала и помехи, осуществлять оптимальную фильтрацию сигнала, а при конструировании аппаратуры выбирать схемные решения для конкретных условий. При построении фазовых радионавигационных систем важной задачей является также изучение искажений фазы радиосигнала при его прохождении по тракту передатчика или приемника. В настоящее время использование высококачественных деталей и применение наиболее рациональных схем позволяет обеспечить высокую стабильность фазы в аппаратуре. Применение следящих фазоизмерительных систем с цифровыми или аналоговыми устройствами, построенных на основе теории автоматического регулирования, обеспечивает высокую точность измерения фазы.
Указанные выше достоинства фазового метода измерений и большие возможности реализации этих достоинств на базе современной техники и достижений науки обусловливают перспективность использования фазы сигнала, в частности, в радионавигации.
Фазовые радионавигационные системы, используемые для обеспечения судовождения, используют разные методы работы, имеют различную точность, дальность действия и позволяют с достаточной надежностью производить обсервации при выполнении различных задач, решаемых судами.
Средние квадратические погрешности определения навигационного параметра и места в зависимости от дальности действия радионавигационных систем, использующих фазовый метод измерений и различные диапазоны волн, показаны в табл. 23.1.
Для приема сигналов РНС и выполнения измерений используются судовые приёмоиндикаторы, основные тактико-технические характеристики которых различны и зависят от принятых принципов построения, способа обработки сигнала и степени автоматизации.
Таблица 23.1
Используемый диапазон волн в РНС |
Дальность действия, км |
Средняя квадратическая погрешность определения навигационного параметра тлп , м |
Средняя квадратическая погрешность определения места М, м |
СДВ |
10 000–12 000 |
600 |
3 000–15 000 |
ДВ |
600 |
60 |
60–300 |
СВ |
До 200 |
15 |
15–150 |
УКВ |
В пределах геометрической видимости |
0,5 |
1–10 |
23.1.2 Методы работы фазовых РНС и их точность
В зависимости от того, какой навигационный параметр определяется, фазовые РНС разделяют на три группы: дальномерные, разностно-дальномерные и угломерные (азимутальные). Методы работы и сам принцип построения РНС каждой из этих групп имеют существенные различия.
В дальномерной фазовой РНС навигационным параметром является расстояние от подвижного объекта до радионавигационной точки (опорной станции), а местоположение этого объекта определяется по двум и более расстояниям до опорных станций.
Физическая сущность дальномерного метода, используемого в дальномерной фазовой РНС, состоит в том, что при распространении радиоволн происходит запаздывание по фазе принятого сигнала относительно опорного:
![]() (23.7)
(23.7)
где D — расстояние, пройденное радиоволной;
vф — фазовая скорость распространения радиоволн.
Т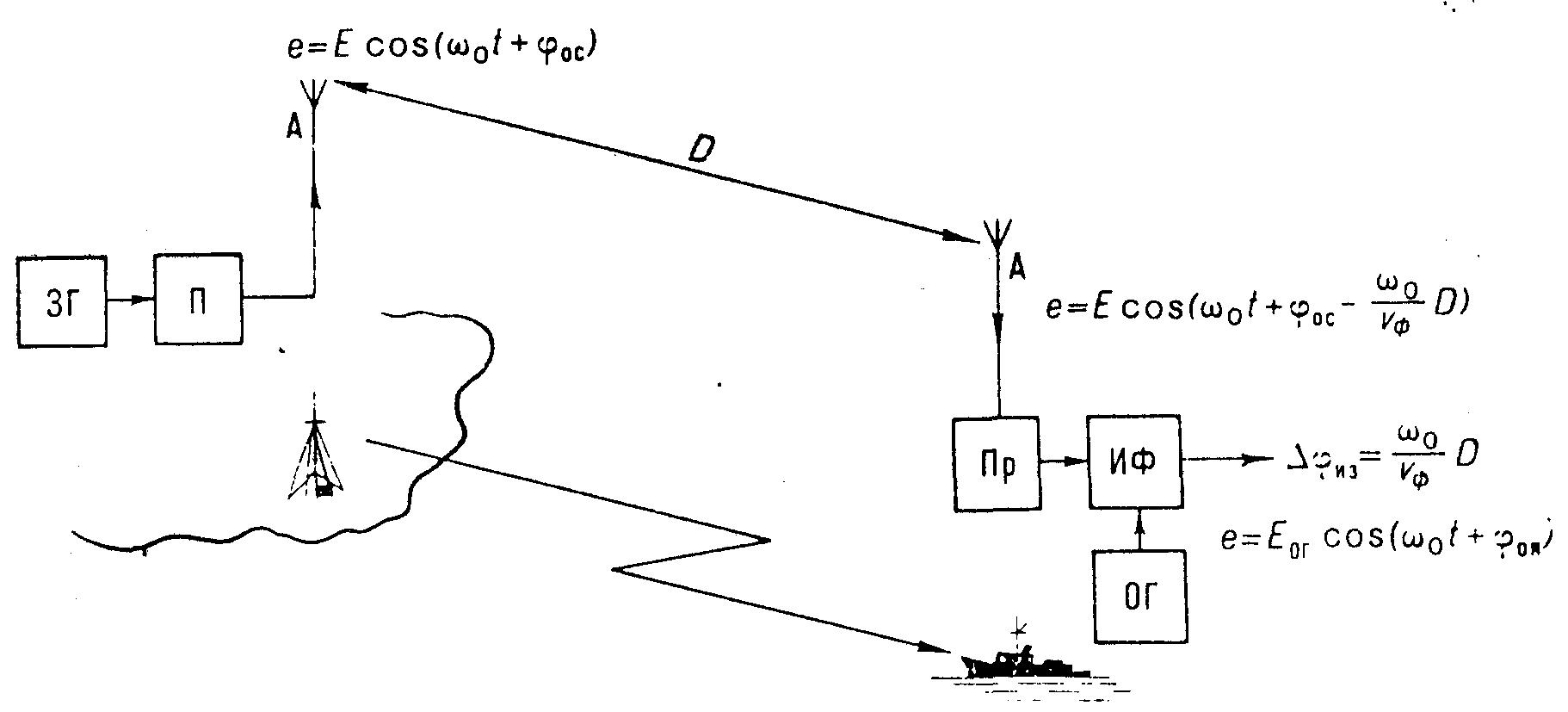 огда,
если на одном конце измеряемого расстояния
D (рис. 23.5) излучать с помощью
передатчика П колебания с частотой
огда,
если на одном конце измеряемого расстояния
D (рис. 23.5) излучать с помощью
передатчика П колебания с частотой
![]() ,
а на другом конце сравнивать по фазе
принятые колебания с колебаниями
опорного генератора ОГ такой же
частоты (
,
а на другом конце сравнивать по фазе
принятые колебания с колебаниями
опорного генератора ОГ такой же
частоты (![]() ),
то определение дальности с помощью
измерителя фазы ИФ можно свести к
измерению сдвига фаз между принятым
сигналом и опорным.
),
то определение дальности с помощью
измерителя фазы ИФ можно свести к
измерению сдвига фаз между принятым
сигналом и опорным.
Рис. 23.5. Состав фазовой дальномерной радионавигационной системы
Приняв начальные
фазы сигнала и опорного напряжения
![]() и
и
![]() ,
получим:
,
получим:
 (23.8)
(23.8)
откуда
![]() , (23.9)
, (23.9)
где
— длина волны,
соответствующая угловой частоте
![]() .
.
Таким образом, измеряя сдвиг фаз между принятым сигналом и опорным, определяют расстояние D. Частота сигнала, используемая для определения навигационного параметра, называется рабочей частотой, а соответствующая ей длина волны — рабочей длиной волны.
Фазовая РНС. использующая дальномерный метод, как правило, состоит из двух станций (вторая станция на рис. 23.5 не показана). Каждая опорная станция содержит передатчик П, задающий генератор ЗГ и антенное устройство А. Судовое оборудование включает приемник Пр, опорный генератор ОГ и измеритель фазы ИФ. Система может включать несколько опорных наземных передающих станций.
Погрешность
определения расстояния
![]() в дальномерной РНС определяется по
формуле:
в дальномерной РНС определяется по
формуле:
![]() (23.10)
(23.10)
Величина этой
погрешности зависит от используемой
длины волны
и погрешности в измерении сдвига фаз
![]() .
Приняв
.
Приняв
![]() радиана и
радиана и
![]() =3000
м, погрешность
=3000
м, погрешность
![]() ,
а при
=300
м
,
а при
=300
м
![]() .
.
Очевидно, что для реализации такой системы стабильность частот задающего генератора передатчика и опорного генератора фазоизмерителя должны быть достаточно высокими. Погрешность измеряемого расстояния из-за нестабильности частот может быть оценена по формуле:
 (23.11)
(23.11)
где
![]() – относительная нестабильность
генераторов;
– относительная нестабильность
генераторов;
t – время, прошедшее с того момента, когда фазы задающего и опорного генераторов были согласованы.
(При
![]() и t=1000
с
=3
км).
и t=1000
с
=3
км).
Таким образом, погрешность из-за нестабильности генераторов накапливается со временем, что обусловливает необходимость иметь очень стабильные генераторы для обеспечения высокой точности. Наиболее точные хранители времени и частоты строятся на основе первичных и вторичных квантовомеханических стандартов частоты и кварцевых генераторов.
К первичным относятся самокалибрующиеся стандарты частоты, т. е. обеспечивающие воспроизведение номинала частоты квантовомеханического перехода. Наиболее распространенным первичным стандартом является квантовомеханический генератор на пучке атомов цезия. К первичным стандартам частоты относят также генераторы на атомарном водороде. К вторичным квантовомеханическим стандартам относятся стандарты частоты на газовой ячейке с парами щелочных металлов и пучке молекул аммиака.
Квантовомеханические стандарты частоты и кварцевые генераторы могут использоваться в различных сочетаниях:
— цезиевый стандарт и группа кварцевых генераторов;
— вторичный (рубидиевый или молекулярный) стандарт частоты и группа кварцевых генераторов;
— группа кварцевых генераторов.
Наивысшей достигнутой кратковременной и долговременной стабильностью частоты обладают водородные стандарты частоты (10-13—10-14), однако их широкое применение ограничивается высокой стоимостью, большим весом и габаритами.
Особые сложности возникают при установке высокостабильных генераторов на подвижных объектах (кораблях, судах, самолетах). В связи с этим рассмотренный выше дальномерный метод, основанный на применении двух эталонных генераторов, в настоящее время не получил распространения.
Для того чтобы ограничить влияние нестабильности частот на погрешность измерения расстояния, применяют способ, при котором опорная наземная передающая станция ретранслирует колебания, излучаемые передатчиком судовой станции. Упрощенная схема дальномерной РНС с ретранслирующей (ведомой) наземной станцией и ведущей судовой станцией показана на рис. 23.6.
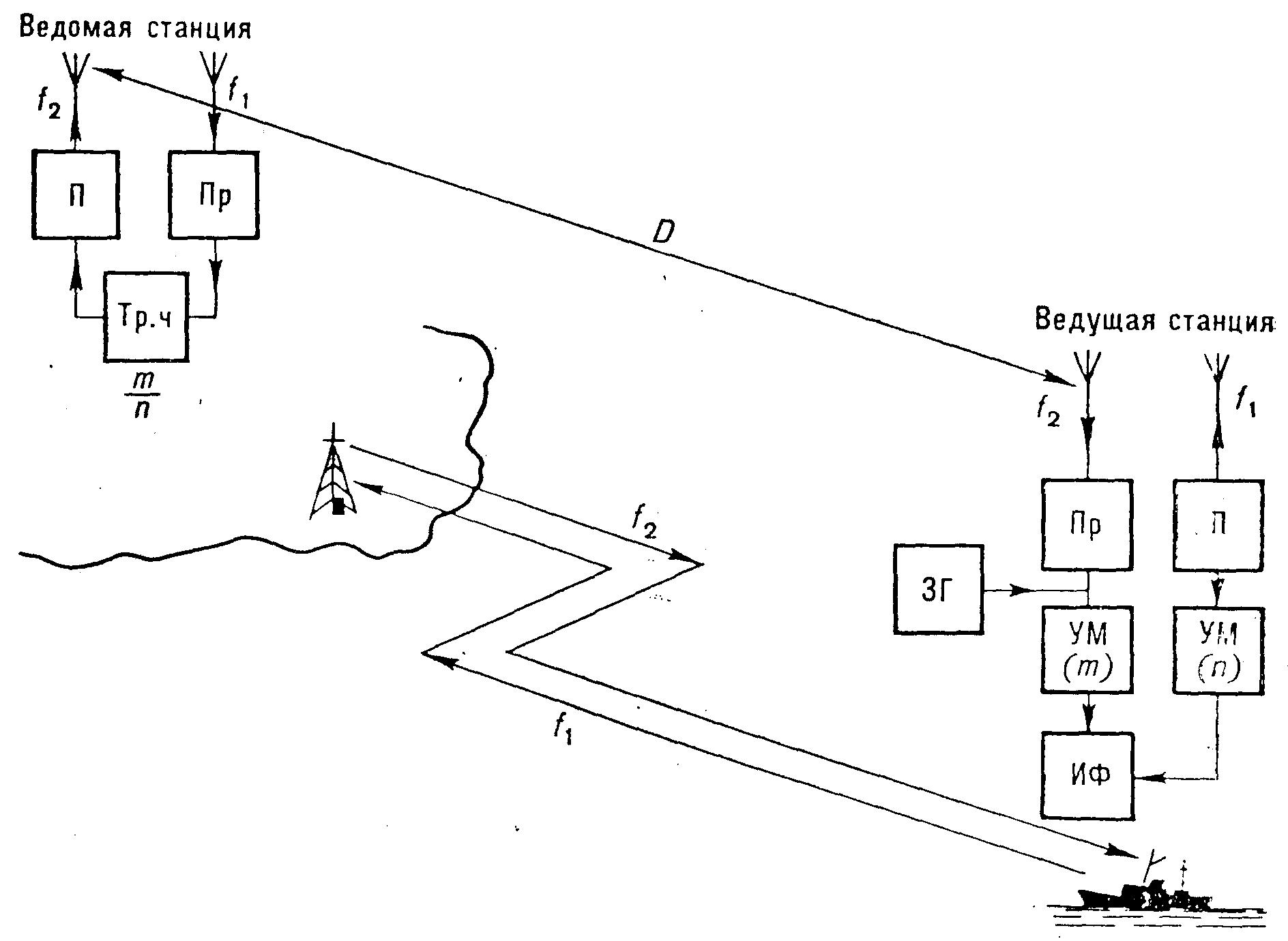
Pиc. 23.6. Состав фазовой дальномерной радионавигационной системы с ретранслятором
Передатчик П
ведущей станции излучает сигнал на
частоте
![]() ,
который принимается приемником Пр
ведомой станции, поступает на трансформатор
частоты Тр. ч, трансформируется по
частоте в отношении т/п (где т и
п — целые числа) и излучается
передатчиком П. Принятый на ведущей
станции ретранслированный сигнал
подается на измеритель фазы ИФ.
Одновременно на ИФ подается также
сигнал с передатчика. При этом
обеспечивается умножение частоты УМ
на т и п соответственно.
,
который принимается приемником Пр
ведомой станции, поступает на трансформатор
частоты Тр. ч, трансформируется по
частоте в отношении т/п (где т и
п — целые числа) и излучается
передатчиком П. Принятый на ведущей
станции ретранслированный сигнал
подается на измеритель фазы ИФ.
Одновременно на ИФ подается также
сигнал с передатчика. При этом
обеспечивается умножение частоты УМ
на т и п соответственно.
В отличие от выражения (23.8) будет осуществлена зависимость:
![]() (23.12)
(23.12)
Навигационный параметр из выражения (23.12) получают в соответствии с выражением:
![]() (23.13)
(23.13)
В рассматриваемой радионавигационной системе приемники и передатчики как ведущей (судовой), так и ведомой (наземной) станций должны работать одновременно.
Возможность одновременной работы судовой и наземной станций может обеспечиваться различными способами. Например, одновременная работа станций обеспечивается, если ведущая станция излучает колебания на частоте f1 , а ведомая станция производит переизлучение принятого сигнала на частоте f2.
Важной технической задачей при создании радионавигационной системы с ретрансляцией сигнала является также обеспечение одновременной работы нескольких судовых станций с одной наземной ведомой станцией. Решение этой задачи, как правило, обеспечивается с помощью системы коммутации, позволяющей одновременную работу 5—10 судовых станций с одной наземной.
Основная погрешность навигационного параметра в такой дальномерной системе обусловливается искажениями фаз сигналов при распространении по трассам между станциями и прохождении через различные тракты аппаратуры, а также погрешностью фазоизмерителя. Вместе с тем в системе, работающей описанным выше методом, нестабильность частоты генератора не создает погрешностей, которые со временем накапливаются, как в системе с двумя эталонными генераторами. В этом случае:
![]() или
или
![]() (23.14)
(23.14)
и погрешность из-за нестабильности частот может быть уменьшена до незначительной величины.
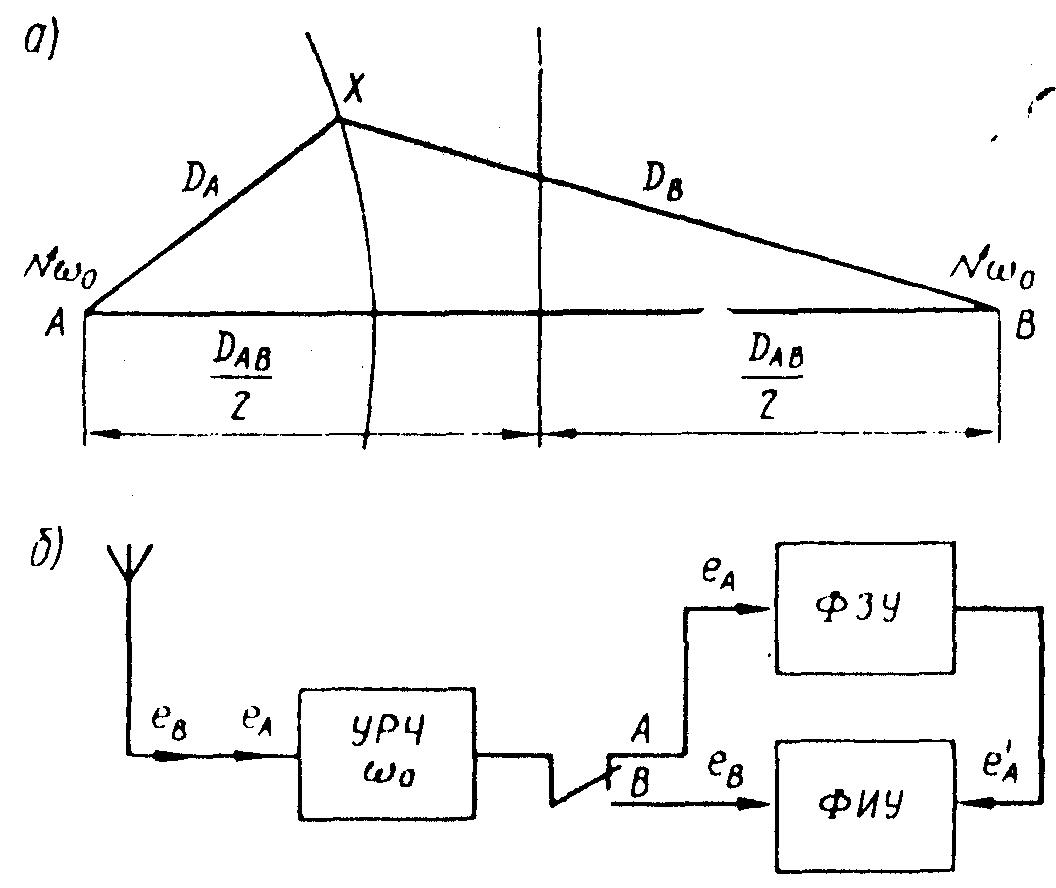
В разностно-дальномерной фазовой РНС навигационным параметром является разность расстояний, а местоположение подвижного объекта определяется по двум разностям расстояний; от объекта до двух разнесенных в пространстве радионавигационных точек, в которых установлены станции. В разностно-дальномерной РНС возможно одновременное определение места большого количества объектов, при этом обеспечивается большая дальность действия при минимальной мощности излучаемых сигналов.
Упрощенная схема ведущей и одной ведомой станций такой радионавигационной системы показана на рис. 23.7. Ведущая и ведомая станции в разностно-дальномерной РНС располагаются в точках с известными координатами и излучают сигналы, которые принимаются судовой станцией, где производится измерение разности фаз . При этом:
![]() (23.15)
(23.15)
где т – множитель коэффициента трансформации частоты;
Db – расстояние между ВМ и ВЩ станциями.
Судовая станция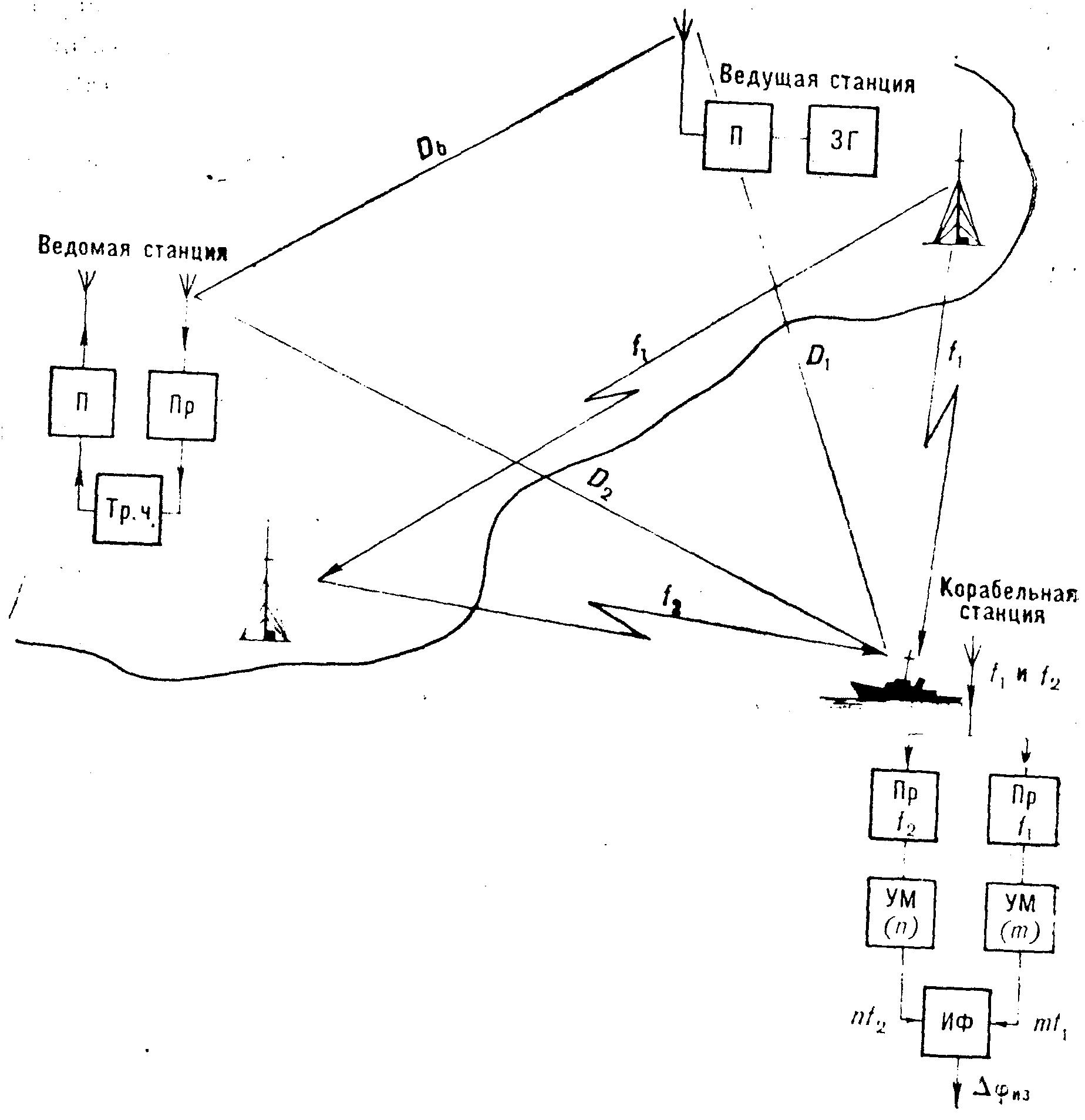
Рис. 23.7. Состав фазовой разностно-дальномерной радионавигационной системы
При известном
расстоянии между опорными станциями
Db по результатам измерения
можно определить разность расстояний
![]() ,
которая и является навигационным
параметром, причем изолинией является
гипербола. Для определения
на судне в отличие от системы с
ретранслятором устанавливается только
приёмоизмерительное устройство
(приёмоиндикатор). Точность определения
навигационного параметра в такой РНС
зависит от стабильности сдвига фаз
сигналов при распространении в
пространстве, прохождении по трактам
аппаратуры и точности измерения сдвига
фаз в условиях помех. Для обеспечения
одновременной работы приемников и
передатчиков ведомых станции, а также
приема сигнала всех станций судовыми
приёмоизмерительными устройствами
применяются различные способы. Наиболее
широко используется способ временного
разделения сигналов, при котором все
станции могут работать на одной несущей
частоте (способ временной селекции).
,
которая и является навигационным
параметром, причем изолинией является
гипербола. Для определения
на судне в отличие от системы с
ретранслятором устанавливается только
приёмоизмерительное устройство
(приёмоиндикатор). Точность определения
навигационного параметра в такой РНС
зависит от стабильности сдвига фаз
сигналов при распространении в
пространстве, прохождении по трактам
аппаратуры и точности измерения сдвига
фаз в условиях помех. Для обеспечения
одновременной работы приемников и
передатчиков ведомых станции, а также
приема сигнала всех станций судовыми
приёмоизмерительными устройствами
применяются различные способы. Наиболее
широко используется способ временного
разделения сигналов, при котором все
станции могут работать на одной несущей
частоте (способ временной селекции).
Угломерные фазовые РНС, например азимутальные радиомаяки, позволяют определять угловые координаты объектов. Навигационным параметром в таких системах является угол А в горизонтальной плоскости, заключенный между северным направлением истинного меридиана, проходящего через середину расстояния D, и направлением на подвижной объект. В угломерных системах измеряется сдвиг фаз колебаний, принимаемых от антенн, разнесенных в пространстве на расстояние D (рис. 23.8).
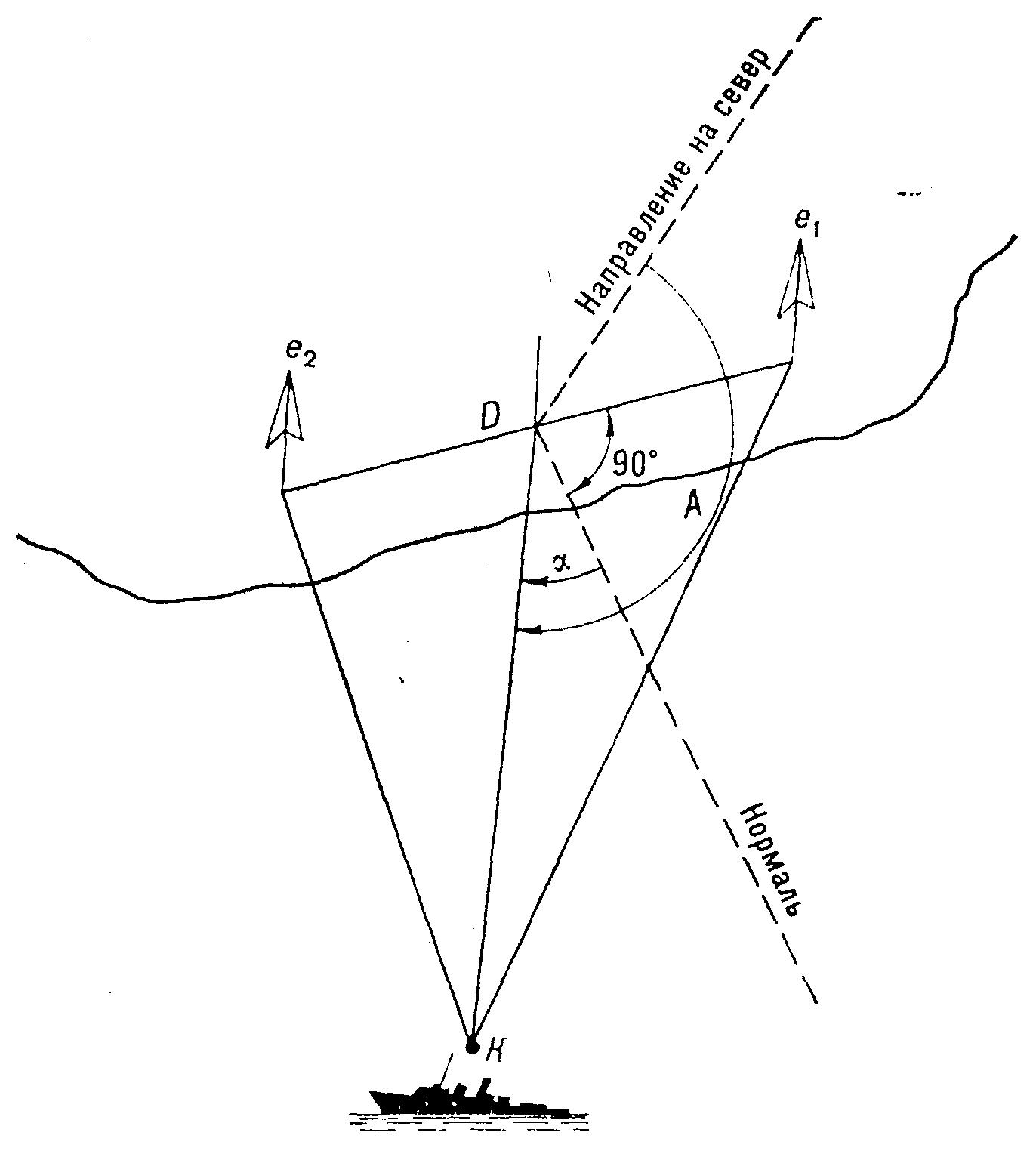


Рис. 23.8. Определение азимута с использованием фазового метода измерений
Наведенные в антеннах э.д.с. будут равны:
![]() , (23.16)
, (23.16)
где — начальная фаза сигнала в центральной точке расстояния D.
В результате измерения разности фаз можно определить направление прихода радиоволн, характеризуемое углом между нормалью к линии, соединяющей антенны, и направлением на судно:
![]()
или
![]() . (23.17)
. (23.17)
Точность получаемого
пеленга зависит от величины D,
точности измерения и стабильности
измеряемого фазового сдвига
![]() .
.
Погрешность угла
![]() может быть вычислена по формуле:
может быть вычислена по формуле:
![]()
Для повышения
точности измерения угла необходимо
увеличить
![]() ,
однако в этом случае результат измерения
угла может стать многозначным.
,
однако в этом случае результат измерения
угла может стать многозначным.
23.3 ПРИНЦИП ДЕЙСТВИЯ ФАЗОВЫХ РНС С ВРЕМЕННОЙ И
ЧАСТОТНОЙ СЕЛЕКЦИЕЙ СИГНАЛОВ
В морской навигации нашли широкое применение фазовые разностно-дальномерные (гиперболические) РНС, использующие фазовые методы измерения РНП для выделения из радиосигналов необходимой навигационной информации о местоположении объекта.
При построении фазовых РНС потребовалось решить проблемы обеспечения когерентности (взаимной согласованности) колебаний, излучаемых береговыми станциями в целях создания в рабочей зоне системы радионавигационного поля с высокостабильной фазовой структурой и возможности опознавания и разделения (селекции) в бортовых приёмоиндикаторах (ПИ) колебаний, приходящих от различных станций.
Когерентность в фазовых РНС обеспечивается либо синхронизацией излучения ведомых станций колебаниями ведущей станции, либо применением высокостабильных атомных стандартов частоты колебаний на каждой из береговых станций с периодической коррекцией их временных шкал.
По способу решения второй из названных выше проблем фазовые РНС делятся на 2 типа: с временной и частотной селекцией сигналов станций.
23.3.1. Фазовые РНС с временной селекцией сигналов
При временной
селекции сигналов станции фазовые РНС
(например, А и В) излучают
когерентные колебания на одной
навигационной частоте
![]() в виде импульсных сигналов достаточно
большой длительности в определенной
временной последовательности (рис.
23.9, а).
в виде импульсных сигналов достаточно
большой длительности в определенной
временной последовательности (рис.
23.9, а).
Пусть станция А,
начиная с момента t = 0, выполнила
излучение колебания, создающего вектор
напряженности электрического поля
![]() .
Спустя интервал времени tк
станция В излучила колебания с
вектором поля
.
Спустя интервал времени tк
станция В излучила колебания с
вектором поля
![]() .
Интервал tк
выбран таким образом, чтобы обеспечить
отсутствие наложения во времени сигналов
различных станций фазовых РНС в любой
точке рабочей зоны системы. Пусть
равенство частот излучения и постоянство
времени tк
обеспечиваются на каждой станции
применением атомных стандартов частоты.
Предполагается также, что временная
диаграмма излучения береговых станций
известна потребителю навигационной
информации, что позволяет обеспечить
соответствующую работу коммутатора
(рис. 23.9, б).
.
Интервал tк
выбран таким образом, чтобы обеспечить
отсутствие наложения во времени сигналов
различных станций фазовых РНС в любой
точке рабочей зоны системы. Пусть
равенство частот излучения и постоянство
времени tк
обеспечиваются на каждой станции
применением атомных стандартов частоты.
Предполагается также, что временная
диаграмма излучения береговых станций
известна потребителю навигационной
информации, что позволяет обеспечить
соответствующую работу коммутатора
(рис. 23.9, б).
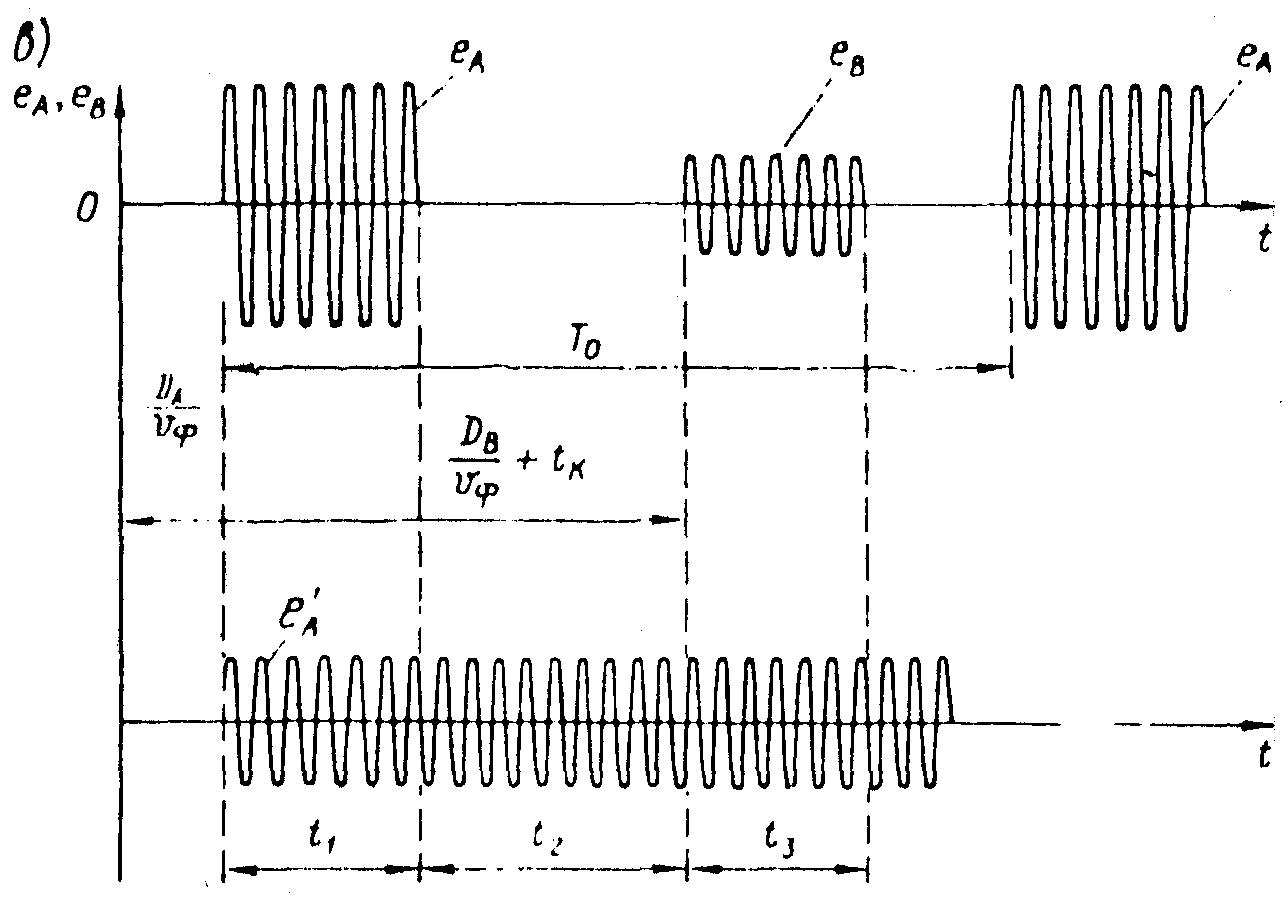

Р ис.
23.9. К принципу действия фазовых РНС с
временной селекцией.
ис.
23.9. К принципу действия фазовых РНС с
временной селекцией.
Интервалы: t1 —запоминание фазы еА; t2 — хранения фазы еА; t3 — фазовые измерения
В точке X расположения судна электромагнитные колебания с вектором ЕA создадут ЭДС на входе ПИ (рис. 3.9, в):
![]() (23.18)
(23.18)
где
![]() — действующая высота антенны ПИ.
— действующая высота антенны ПИ.
Это колебание
после усиления подается на фазозапоминающее
устройство ФЗУ с целью получения
«копии» сигнала станции
![]() ,
что осуществляется посредством подстройки
колебаний опорного генератора ФЗУ
под частоту и фазу колебаний станции
А.
,
что осуществляется посредством подстройки
колебаний опорного генератора ФЗУ
под частоту и фазу колебаний станции
А.
В момент прихода сигнала станции В на входе приемника будет действовать ЭДС:
![]() (23.19)
(23.19)
Колебания [формула (23.19)], поступая после усиления на фазоизмерительное устройство ФИУ, сравниваются по фазе с колебаниями еА, являющимися копией сигнала [формула (23.18)].
ФИУ укажет разность фаз:
![]() (23.20)
(23.20)
В выражении (23.20) последнее слагаемое — величина постоянная и учитывается при построении радионавигационных карт.
* В целях наглядности изложения амплитудные
значения действующих в схеме напряжении
полагаются единичными и при аналитическом
описании колебаний опущены.
В целях наглядности изложения амплитудные
значения действующих в схеме напряжении
полагаются единичными и при аналитическом
описании колебаний опущены.
Поэтому окончательно
зависимость (23.20), учитывая соотношение
![]() можно записать в виде:
можно записать в виде:
![]() (23.21)
(23.21)
Эта формула—навигационная функция фазовых гиперболических РНС.
23.3.2. Фазовые РНС с частотной селекцией сигналов
При частотной селекции сигналов станции одновременно излучают колебания на различных частотах, являющихся в целях обеспечения их когерентности гармониками общей для них, так называемой базисной частоты.
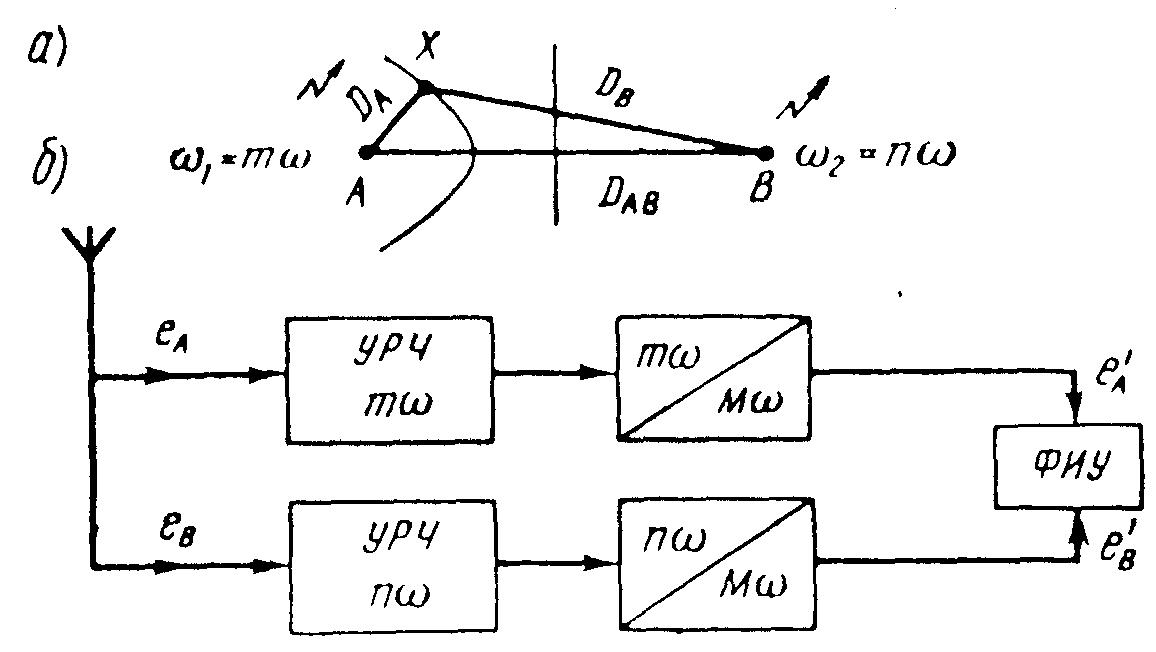
Рис. 23.10. К принципу действия фазовых РНС частотной селекцией
Пусть станции А и В одновременно излучают колебания, которые создают векторы напряженности электрического поля:
![]() и
и
![]() ,
,
где т, n — номера гармоник базисной частоты (рис. 23.10, а).
В точке Х приема эти колебания создадут ЭДС на входах соответствующих частотных каналов ПИ (рис. 23.10, б):
![]() (23.22)
(23.22)
![]() .
(23.23)
.
(23.23)
Если данные
колебания после усиления подать
непосредственно на ФИУ, то в измеренной
разности фаз появится составляющая
![]() — функция времени, изменяющаяся с
разностной частотой. Это обстоятельство,
хотя и не является принципиальным
препятствием к созданию фазовых РНС,
существенно усложняет ее построение.
— функция времени, изменяющаяся с
разностной частотой. Это обстоятельство,
хотя и не является принципиальным
препятствием к созданию фазовых РНС,
существенно усложняет ее построение.
Поэтому колебания [см. формулы (23.22) и (23.23)] преобразуют в ПИ в колебания одной частоты — частоту сравнения. Один из возможных вариантов такого преобразования заключается в умножении частот колебаний на величины M/m и М/п соответственно, где М—наименьшее общее кратное между числами т и n. Полученные таким образом колебания частоты сравнения M:
![]() (23.24)
(23.24)
![]() (23.25)
(23.25)
подаются далее на ФИУ, которое укажет искомую разность фаз:
![]() (23.26)
(23.26)
где
![]() — длина волны сравнения.
— длина волны сравнения.
Зависимость (23.26), совпадающая по виду с выражением (23.21), наглядно иллюстрирует тот факт, что показания ФИУ оказываются пропорциональными частотам, на которых ведутся фазовые измерения (частотам сравнения M), и в этом смысле не зависят от частот излучения береговых станций.
23.4. ТОЧНОСТЬ И МНОГОЗНАЧНОСТЬ ФАЗОВЫХ ИЗМЕРЕНИЙ.
ФАЗОВАЯ ДОРОЖКА
Рассматривая
перемещение судна в радионавигационном
поле, образованном фазовой РНС, и
анализируя при этом зависимость (23.21),
нетрудно заметить, что ФИУ, работающее
на частоте сравнения ,
укажет изменение разности фаз
![]() на 2 при изменении
разности расстояний до береговых станций
на длину волны сравнения
на 2 при изменении
разности расстояний до береговых станций
на длину волны сравнения
![]() ,
т. е. при выполнении условия
,
т. е. при выполнении условия
![]() или
или
![]() .
.
Если изменение
разности расстояний
![]() будет больше ,
то полный фазовый сдвиг
будет больше ,
то полный фазовый сдвиг
![]() ,
очевидно, будет больше 2.
,
очевидно, будет больше 2.
ФИУ в этом
случае покажет лишь дробную часть
фазового цикла
![]() ,
где N—число полных фазовых циклов.
,
где N—число полных фазовых циклов.
Следовательно,
даже при включении ПИ на неподвижном
судне при
![]() отсчёт РНП
отсчёт РНП
![]() не даст однозначного определения НП
не даст однозначного определения НП
![]() ,
а будет соответствовать ряду значений
,
отличающихся одно от другого на величину
(рис. 23.11).
,
а будет соответствовать ряду значений
,
отличающихся одно от другого на величину
(рис. 23.11).
Участок рабочей зоны фазовой РНС, заключенный между двумя гиперболами, при плавании судна в пределах которого разность фаз сравниваемых колебаний может изменяться на 2, называется фазовой дорожкой. Число фазовых дорожек, укладывающихся на базовой линии РНС, а при фиксированной ее длине — ширина фазовой дорожки, являются своеобразной мерой многозначности данной фазовой РНС.
Рис. 23.11. Многозначность фазовых измерений
Задачу об определении ширины фазовой дорожки можно решить, используя понятие градиента НП.
Так, при пересечении
фазовой дорожки по кратчайшему расстоянию
d изменение НП — разности расстояний
![]() — будет равно
и в соответствии с определением градиента
НП получим для разностно-дальномерной
системы:
— будет равно
и в соответствии с определением градиента
НП получим для разностно-дальномерной
системы:
![]() .
.
Из последнего выражения следует, что:
 (23.27)
(23.27)
В частном случае на базовой линии =180° и ширина фазовой дорожки d0 будет равна /2.
Таким образом, чем больше ширина дорожки d, тем меньше сказывается многозначность фазовых отсчетов при навигационном использовании фазовой РНС, а при условии, что на базовой линии будет укладываться половина длины волны сравнения, многозначность вообще не будет возникать. При подобном подходе к построению фазовых РНС, помимо технических трудностей, связанных с применением очень низких частот (больших длин волн), значительно ухудшается точность фазовых измерений. Разрешим формулу (23.21) относительно искомого значения НП
![]() (23.28)
(23.28)
Из анализа зависимости (23.28) следует, что для улучшения точности определения НП необходимо не только повышать инструментальную точность фазовых измерений, которая лежит в пределах 0,005—0,01 фазового цикла (1 фазовый цикл—360°), но и уменьшать длину волны сравнения .
Это противоречие в выборе длины волны сравнения обычно решается в фазовых РНС в пользу длин волн, обеспечивающих высокую точность определения НП. Возникающая в этих условиях многозначность фазовых отсчетов может быть разрешена следующими способами:
1) непрерывное наблюдение при перемещении судна за изменением текущей разности фаз сравниваемых колебаний с фиксацией количества полных фазовых циклов (способ привязки);
2) периодический перевод РНС в режим формирования радионавигационного поля грубой фазовой структуры со значительно более широкими дорожками.
Первый способ предполагает первоначальное определение положения судна при включении ПИ с точностью не хуже половины ширины дорожки и последующую непрерывную работу его. Недостатком этого способа является то, что при воздействии радиопомех возможные ошибки фазовых измерений могут привести к безвозвратной потере одного (реже нескольких) фазовых циклов.
Второй способ, используемый в настоящее время в абсолютном большинстве фазовых РНС, реализуется за счет излучения береговыми станциями наряду с основными дополнительных частот и получения фазовых отсчетов на существенно более низких частотах, формируемых тем или иным способом в бортовых ПИ из этого многочастотного канала.
23.5 РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ ФАЗОВЫХ И ВРЕМЕННЫХ
ИЗМЕРЕНИЙ
Измерение разностей фаз в РНС осуществляется с помощью специальных устройств, включающих, в общем случае, антенну, приемник, который усиливает принятые сигналы и выполняет их предварительную селекцию, и измеритель фазы. Задачей измерителя фазы является выявление информации, содержащейся в фазе сигнала.
В реальных условиях работа РНС происходит в обстановке, когда принимается не только сигнал, несущий полезную информацию, но и помеха. Следовательно, на практике фазовые измерения выполняются с использованием смеси сигнала и помехи, что обусловливает при создании РНС необходимость выбора методов и схем, позволяющих оптимально измерять фазу сигнала при наличии помех.
Как показано выше, измерить фазу колебаний можно только сравнив ее с фазой другого колебания, принимаемой за начало отсчета. Для измерения оба колебания одновременно подаются на измеритель фазы. Если по условиям работы РНС колебания принимаются разновременно, то предварительно осуществляют «запоминание» фазы одного из колебаний до прихода второго, а затем одновременно подают оба колебания на измеритель фазы. Упрощенная схема, на которой изображен порядок измерения разности фаз, показана на рис. 23.12.
Рис. 23.12. Упрощенная схема измерения разности фаз
В фазовых РНС могут использоваться прямые и косвенные методы фазовых измерений и различные измерители фазы, с помощью которых эти методы обеспечиваются.
При прямых методах разность фаз измеряется непосредственно между сравниваемыми колебаниями с использованием какого-либо фазочувствительного устройства и регистрирующего прибора.
При косвенных методах используется в основном компенсационный метод, т. е. метод, при котором подлежащую измерению разность фаз замещают (компенсируют) уже известной равновеликой ей величиной, искусственно создаваемой специальными устройствами.
Простейшие прямые измерения разности фаз можно выполнить по изображениям на экране электронно-лучевой трубки (см. рис. 23.13). Такой способ измерения был ранее реализован на первых образцах РНС (например, РНС «Координатор»). При работе с ЭЛТ для измерения разности фаз двух колебаний, частоты которых находятся в рациональном отношении, на отклоняющие пластины ЭЛТ подаются соответствующие напряжения и1 и и2. В ЭЛТ из накаленного катода К электроны направляются к анодам A1 и А2, встречая на пути фокусирующее приспособление, благодаря которому пучок электронов становится параллельным.
Рис. 23.13. Упрощенная схема измерения разности фаз с помощью ЭЛТ
Созданный узкий
пучок электронов попадает на флуоресцирующий
экран Э. Электрическое поле между
отклоняющими пластинами, на которые
поданы колебания для измерения разности
фаз, вызывает отклонение пучка электронов
пропорционально величине приложенных
напряжений. При одновременном действии
обоих напряжений происходит перемещение
луча по сложной траектории (фигура
Лиссажу). Если 1
2
(например,
![]() ),
то при различных значениях разности
фаз
от -45 до +45° фигуры будут иметь вид,
показанный на рис. 23.13. Для измерения
разности фаз производят счет полуциклов,
равных /2 или
90°, т. е. отмечают, сколько раз произошло
изменение фигуры из положения для из
= – 45° в положение для из
= + 45°. Для нахождения долей полуциклов
любым способом отмечают части изменяющейся
фигуры. Например, с помощью кальки можно
измерить длину всей фигуры и отметить
отрезки, соответствующие её изменению.
),
то при различных значениях разности
фаз
от -45 до +45° фигуры будут иметь вид,
показанный на рис. 23.13. Для измерения
разности фаз производят счет полуциклов,
равных /2 или
90°, т. е. отмечают, сколько раз произошло
изменение фигуры из положения для из
= – 45° в положение для из
= + 45°. Для нахождения долей полуциклов
любым способом отмечают части изменяющейся
фигуры. Например, с помощью кальки можно
измерить длину всей фигуры и отметить
отрезки, соответствующие её изменению.
Достоинством этого метода является простота технической реализации, наглядность и возможность измерения разности фаз без приведения колебаний к единой частоте. В штурманской практике этот метод неудобен, так как требует непрерывного наблюдения за экраном ЭЛТ. В современных фазовых РНС электроннолучевые трубки используются в некоторых контрольных приборах для наблюдения за качеством принимаемых сигналов.
Более широкое применение в штурманской практике нашли косвенные методы измерения разности фаз. При косвенных измерениях сигналы преобразуются так, чтобы измеряемой разности фаз соответствовала определенная амплитуда напряжения, число импульсов или другой параметр. Косвенные измерения могут быть выполнены с использованием фазового детектора и стрелочного (или цифрового) измерительного прибора.
Фазовые измерения в большинстве ПИ осуществляются с использованием фазометрических следящих систем компенсационного типа, которые могут быть выполнены на аналоговой или дискретной элементной базе.
Р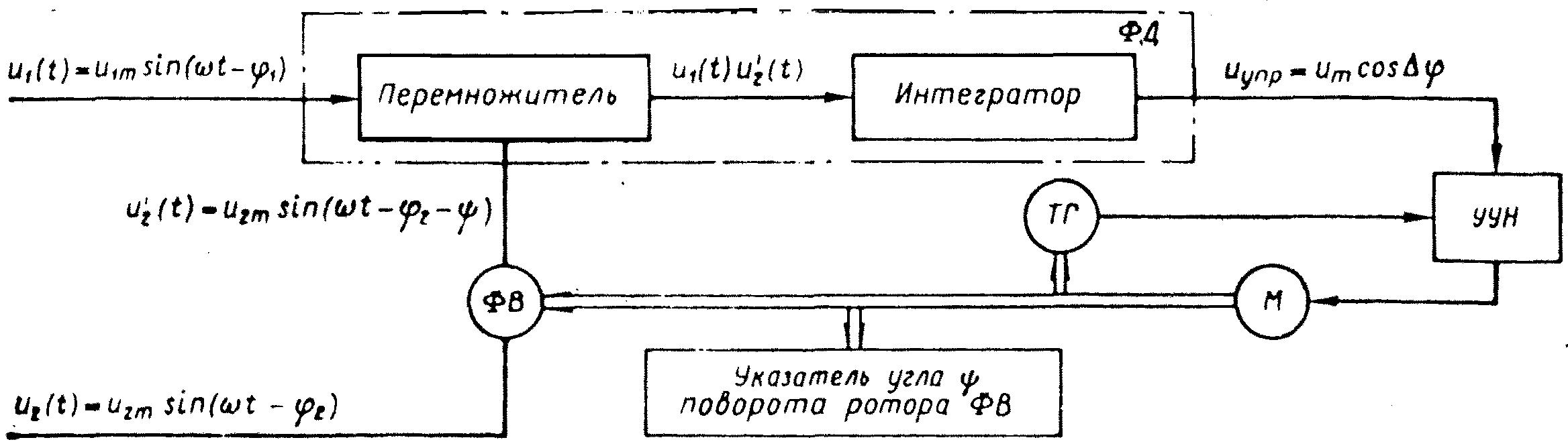 ассмотрим
функциональную схему компенсационно-следящего
фазометра аналогового типа (рис. 23.14).
ассмотрим
функциональную схему компенсационно-следящего
фазометра аналогового типа (рис. 23.14).
Рис. 23.14. Функциональная схема компенсационно-следящего фазометра аналогового типа
Чувствительный
элемент этой схемы — фазовый детектор
ФД, эквивалентная функциональная
схема которого включает в себя
перемножитель и интегратор. При подаче
на 2 входа ФД колебаний
![]() и
и
![]() ,
разность фаз
,
разность фаз
![]() которых необходимо измерить, на выходе
перемножителя будет вырабатываться
напряжение, содержащее постоянную и
переменную составляющие:
которых необходимо измерить, на выходе
перемножителя будет вырабатываться
напряжение, содержащее постоянную и
переменную составляющие:
![]()
Переменная составляющая в дальнейшем подавляется в интеграторе, представляющем собой фильтр нижних частот. Поэтому на выходе ФД получим управляющее напряжение uупр, пропорциональное косинусу разности фаз сравниваемых колебаний:
![]()
Это напряжение после усиления и преобразования в усилителе управляющего напряжения УУН управляет работой исполнительного двигателя М, который начинает разворачивать ротор фазовращателя ФВ, установленного в цепи одного из сравниваемых по фазе колебаний. Поворот ротора ФВ на угол вызывает изменение фазы колебаний u2(t) на этот же угол, что сопровождается изменением (уменьшением) управляющего напряжения uyпp. Отработка следящей системы закончится тогда, когда напряжение uyпp рассогласования не станет равным нулю, что будет иметь место при очевидном условии:
![]() (23.29)
(23.29)
Угол поворота ФВ 0, удовлетворяющий условию (23.29), определяется:
![]()
Таким образом, после отработки следящей системы угол 0 поворота ротора ФВ равен разности фаз сравниваемых колебаний с точностью до динамической ошибки следящей системы.
Постоянный сдвиг фазы на 90° учитывается при градуировке шкалы индикатора разности фаз. Отрицательную обратную связь в следящей системе обеспечивает тахогенератор ТГ. Точность измерения разности фаз рассмотренным методом лежит в пределах 0,005—0,01 фазового цикла.
В современных ПИ все более широкое распространение находит дискретный метод измерения разности фаз колебаний, обеспечивающий точность до 0,001 фазового цикла. В соответствии с этим методом фиксируются моменты времени между переходами через нуль двух сравниваемых колебаний и полученный временной интервал заполняется импульсами высокостабильной частоты повторения. Далее эти импульсы подсчитываются электронным счетчиком. Результат подсчета импульсов легко преобразуется в искомое значение РНП — разность фаз сравниваемых колебаний.
В качестве фазозапоминающего устройства в ПИ фазовых РНС используются опорные генераторы (ОГ) бортовой аппаратуры, снабженные системой автоматической подстройки фазы (АПФ). Функциональная схема системы АПФ ОГ аналогового типа (рис. 23.15) принципиально не отличается от рассмотренной выше фазоизмерительной схемы компенсационно-следящего типа.
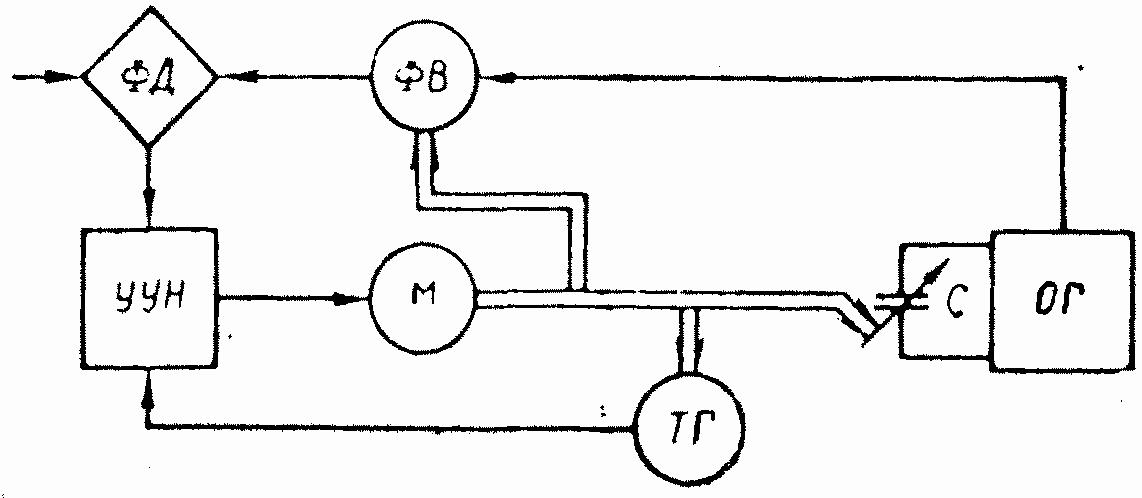
Рис. 23.15. Функциональная схема системы автоматической подстройки
фазы (частоты) опорного генератора
Пусть на левый вход ФД схемы АПФ поступает колебание, фазовое состояние которого необходимо «запомнить». При наличии рассогласования по фазе (частоте) между этим колебанием и колебаниями ОГ выработанное ФД управляющее напряжение после усиления и преобразования в усилителе УУН приводит во вращение исполнительный двигатель М. Двигатель одновременно разворачивает ротор фазовращателя ФВ и ротор конденсатора переменной емкости С, включенного в контур ОГ. В результате в процессе отработки схемы синхронно изменяются частота и фаза колебаний ОГ до тех пор, пока управляющее напряжение на выходе ФД не станет равным нулю. В этом случае будет иметь место совпадение колебаний ОГ по частоте и фазе с входными колебаниями.
В ПИ импульсно-фазовых РНС широко используются схемы измерения РНП, чувствительный элемент которых — временные различители (ВР). Временной различитель по существу представляет собой ключевую схему, управляемую измерительными импульсами — стробами.
Функциональная схема использования ВР в измерительном канале ПИ и временные диаграммы, поясняющие его работу, представлены соответственно на рис. 23.16, а и б.
На вход ВР подается гармоническое напряжение 1, слежение за точками перехода через ноль которого необходимо осуществить. Измерительные импульсы малой длительности — стробы 2 поступают на ВР и разрешают прохождение на его выход сигнального напряжения, совпадающего во времени со стробом. Если существует временное рассогласование между точками перехода через нуль сигнального напряжения и стробами, то в зависимости от его знака в интеграторе схемы будет накапливаться напряжение 3 (3') определенной полярности, которое по достижении некоторого порогового значения используется как сигнал на перемещение стробов во времени до совпадения их с точками перехода через нуль входного напряжения (2'').
Рис. 23.16. Функциональная схема использования временного различителя в
измерительном канале ПИ и временные диаграммы, поясняющие его работу
Осуществив подобную процедуру во втором аналогичном канале слежения с другим из сравниваемых по фазе колебаний и, измерив временной сдвиг между стробами первого и второго каналов, получают отсчет РНП — временного сдвига между входными напряжениями либо непосредственно в единицах времени (импульсный отсчет), либо в долях периода сравниваемых колебаний (фазовый отсчет).
В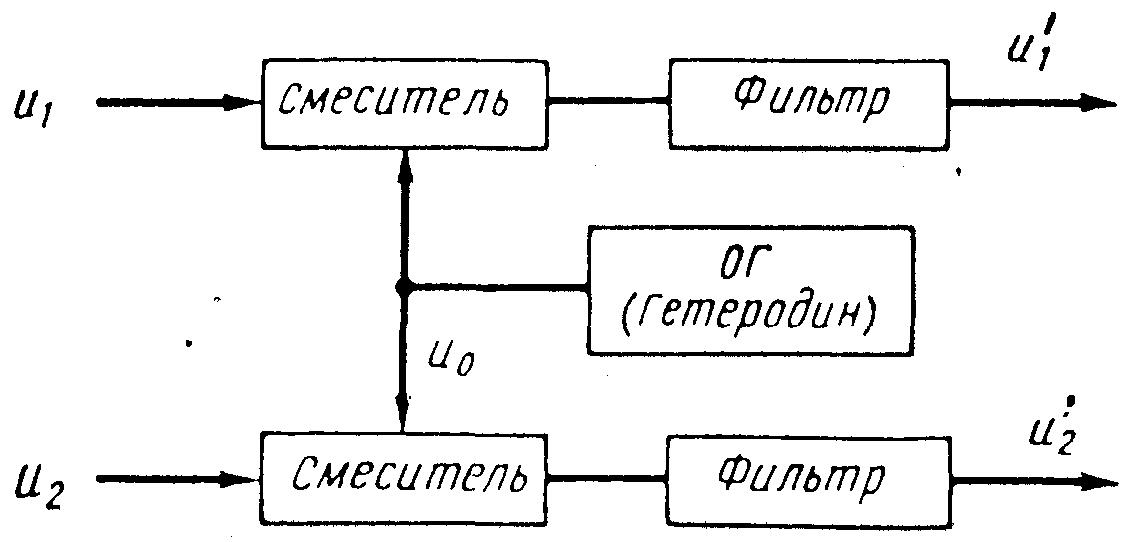 ПИ фазовых и импульсно-фазовых систем
также используется явление сохранения
разности фаз колебаний в процессе
преобразования их частоты. Функциональная
схема преобразования частоты двух
колебаний представлена на рис. 23.17.
ПИ фазовых и импульсно-фазовых систем
также используется явление сохранения
разности фаз колебаний в процессе
преобразования их частоты. Функциональная
схема преобразования частоты двух
колебаний представлена на рис. 23.17.
Рис. 23.17. Функциональная схема преобразования частоты радионавигационных сигналов
Пусть 2 гармонических
напряжения
![]() и
и
![]() с разностью фаз
с разностью фаз
![]() смешивают в двух смесителях с колебаниями
вспомогательного ОГ (гетеродина) ПИ
смешивают в двух смесителях с колебаниями
вспомогательного ОГ (гетеродина) ПИ
![]() .
На выходах фильтров соответствующих
каналов выделяются колебания разностной
частоты
.
На выходах фильтров соответствующих
каналов выделяются колебания разностной
частоты
![]() :
:
![]() .
.
Очевидно, что разность фаз этих колебаний, измеренная на разностной более низкой частоте остается неизменной, т. е. равна разности фаз входных высокочастотных колебаний:
![]() .
.
Таким образом, процесс преобразования частоты в бортовых ПИ фазовых РНС не является препятствием для реализации фазовых измерений НП.
23.6 ФАЗОВАЯ ГИПЕРБОЛИЧЕСКАЯ РНС «ДЕККА»
Радионавигационная система средней дальности действия «Декка-Навигатор» (сокращенно «Декка») относится к классу гиперболических фазовых РНС с частотной селекцией сигналов и работает в длинноволновом диапазоне волн. Разработана в годы второй мировой войны в Великобритании, для целей морской навигации используется с конца 40-х годов и с тех пор получила широкое распространение. В настоящее время в различных регионах земного шара станций системы обеспечивают навигацию в районах интенсивного судоходства: европейские воды от Нордкапа до Гибралтара, район Персидского зал, Бомбея, Калькутты, северо-западное побережье Австралии, восточное побережье Канады, Гвинейский зал., побережье Японии, Южной Африки.
Дальность действия системы составляет 250—300 миль при расстояниях между береговыми станциями цепочек порядка 60—120 миль. Точность определения места зависит от многих факторов. Это в первую очередь взаимное расположение потребителей навигационной информации относительно береговых станций данной цепочки и связанных с этим длин трасс и условий распространения радиоволн, времени суток, геометрического фактора, уровня помех и т. п.
Так, при работе в дневное время на удалениях до 100 миль от береговых станций точность определения места обеспечивается в пределах 0,01—0,03 мили. В ночное время на дальностях порядка 250 миль она может ухудшиться до 1,0—1,5 мили. На рис. 23.19, б показаны зоны действия РНС «Декка».
23.6.1. Береговые станции РНС «Декка», режим излучения сигналов
Стандартная цепочка РНС «Декка» включает в себя 4 береговых синхронизированных излучателя: ведущая станция и 3 ведомых (рис. 23.19, а). Ведомые станции в фазовой РНС «Декка» получили специальные названия по цвету гиперболических изолиний на навигационных картах: красная, зеленая и фиолетовая.
а)
б)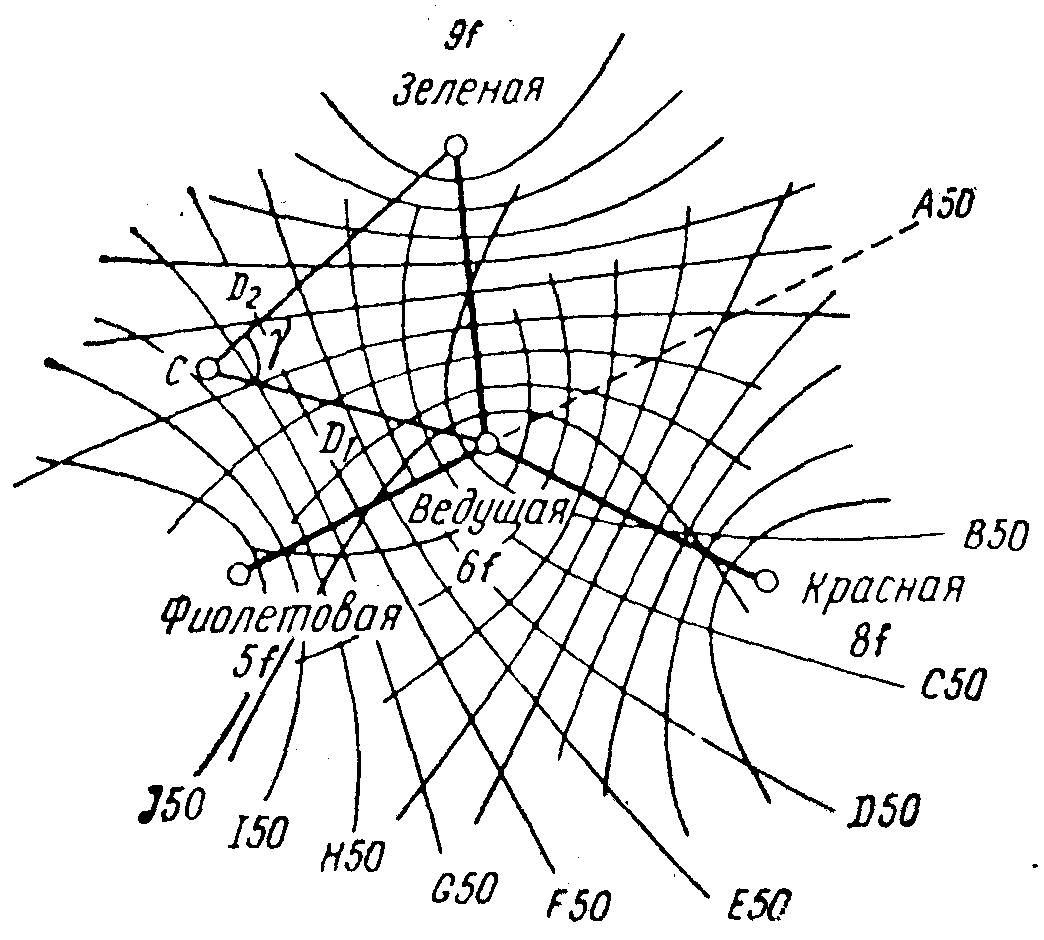
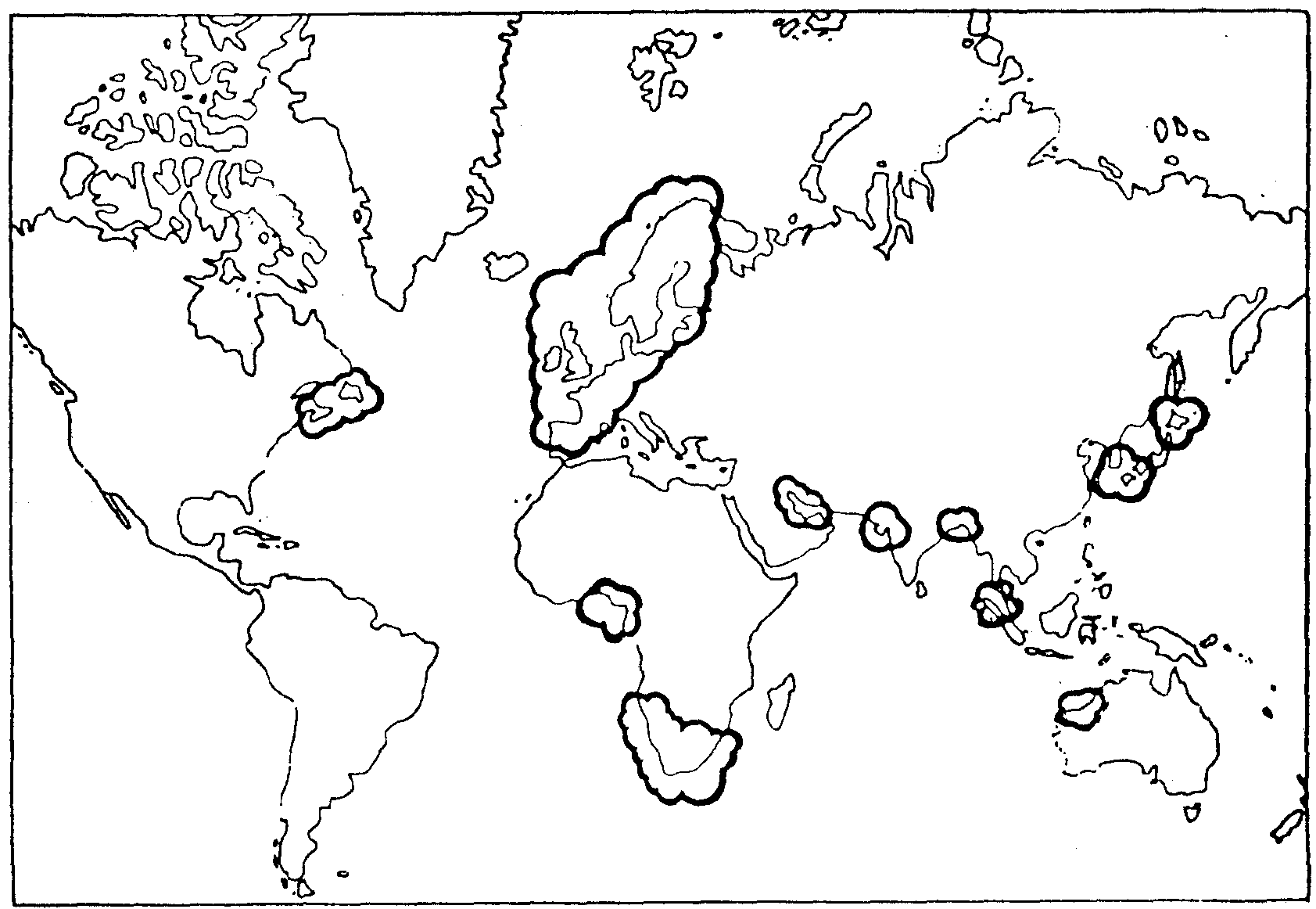
Рис. 23.19. а) стандартная цепочка РНС «Декка»;
б) – зоны действия РНС «Декка»
Береговые станции цепочек РНС «Декка» создают в пространстве электромагнитное поле высокостабильной фазовой структуры с высокой разрешающей способностью, периодически изменяют её, загрубляют при переходе в режим устранения многозначности фазовых измерений. В основном режиме точных фазовых измерений в целях обеспечения когерентности колебаний береговые станции излучают незатухающие гармонические сигналы частот, являющихся гармониками одной, так называемой базисной частоты 1f; ведущая станция 6f , ведомые станции соответственно красная 8f, зеленая 9f фиолетовая 5f.
Каждая цепочка имеет свое значение базисной частоты 1f, которое в зависимости от обозначения цепочки может лежать в пределах 14,0—14,3 кГц. Цепочки РНС «Декка» обозначаются буквенно-цифровой комбинацией, например, 6Е—цепь Финского зал, 0А — Южная Балтийская, 10В—цепь пр. Скагеррак и т.д. Цифра в обозначении цепочек может принимать значения N=0, 1, 2, .... 10, в качестве букв используются первые 6 букв латинского алфавита: А, В, С, D. Е, F. Если буквам присвоить определенные цифровые значения Q (табл. 23.2), то образование базисных частот в зависимости от обозначения цепочек можно представить в виде формулы:
![]()
Таблица 23.2
Буквы в обозначении цепочки |
АА |
ВВ |
СС |
DD |
EE |
FF |
Q |
—–10 |
—–9 |
—–8 |
88 |
99 |
110 |
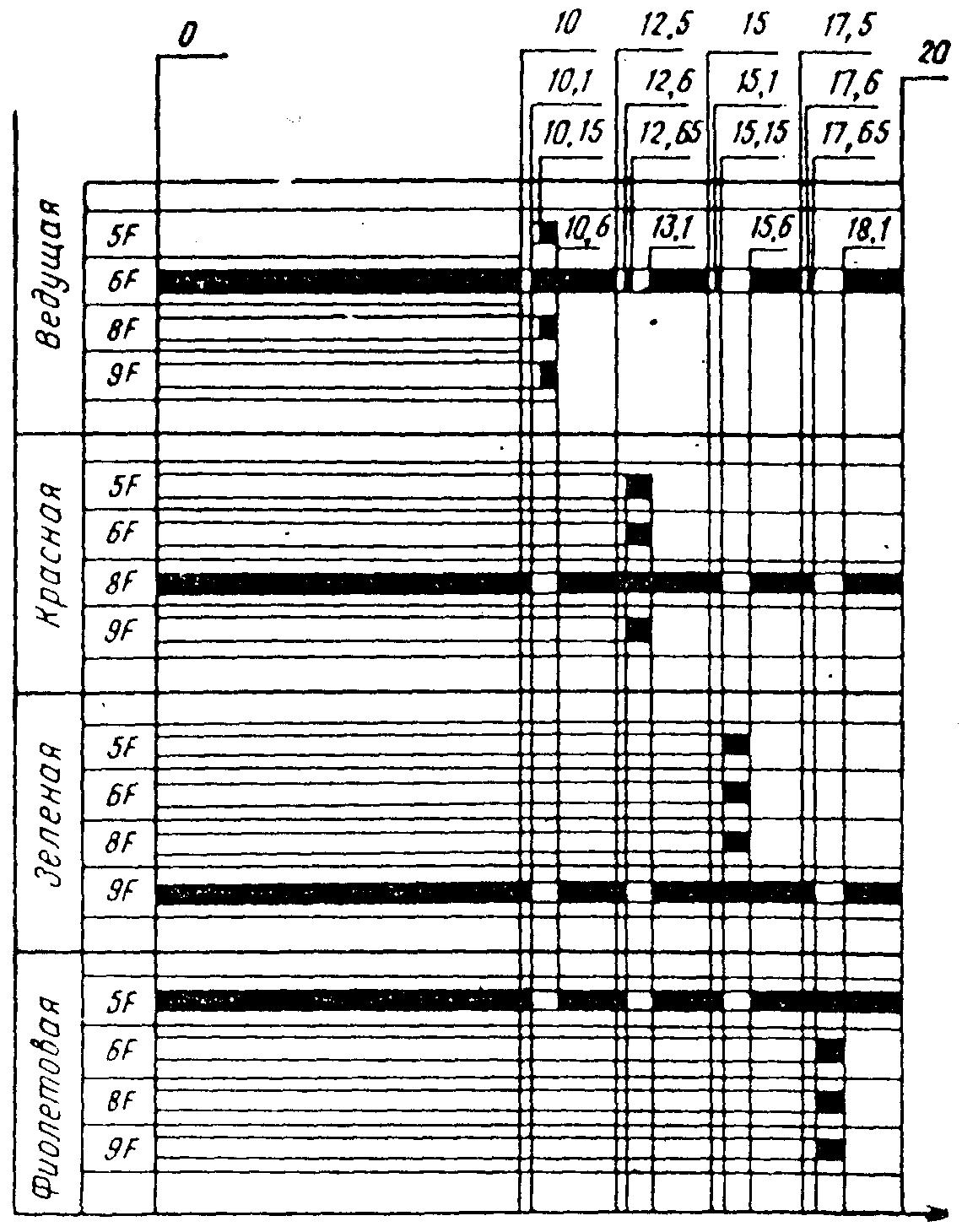
Используемый в настоящее время режим излучения береговых станций РНС «Декка» носит название МР («Multipulse») и отличается повышенной степенью защиты от ионосферных сигналов в пределах рабочей зоны системы относительно использовавшихся ранее режимов излучения VI и V2. Временная диаграмма излучения береговых станций в этом режиме представлена на рис. 23.20.
t
Рис. 23.20. Временная диаграмма излучения береговых станций РНС «Декка» в режиме МР
Полный цикл излучения составляет 20 с. В пределах этого интервала времени каждая станция цепочки почти непрерывно излучает незатухающие когерентные колебания своей частоты:
ведущая станция — 6f (в диапазоне 84—86 кГц в зависимости от конкретного значения базисной частоты 1f данной цепочки); ведомые станции соответственно: красная — 8f (112—115 кГц), зеленая — 9f (126—129 кГц), фиолетовая—5f (70—72 кГц), которые и определяют в процессе преобразования и измерений в бортовых ПИ семейства точных гиперболических изолиний.
Для устранения многозначности получаемых фазовых отсчетов нормальная работа станций кратковременно прерывается на 0,45 с 4 раза за цикл излучения. В течение этих кратковременных перерывов каждая береговая станция цепочки в определенной последовательности — ведущая, красная, зеленая, фиолетовая — излучает одновременно колебания всех четырех частот — 6f, 8f, 9f, 5f, присущие данной цепочке РНС «Декка», причем у остальных станций в эти интервалы времени пауза в излучении. Бортовые ПИ в эти перерывы работают в режиме устранения многозначности — формирования грубой сетки гипербол, синтезируя из принимаемых частот тем или иным способом в зависимости от типа ПИ колебания базисной частоты 1f, фазовые измерения на которой и формируют грубые дорожки (зоны) в РНС «Декка».
Кратковременные перерывы в излучении ведущей станции на 0,1 с, предваряющие переход береговых станций в режим излучения четырех частот одновременно (так называемые стартстопные сигналы), являются управляющими сигналами для перевода ведомых станций и бортовых ПИ в режим устранении многозначности фазовых отсчетов. Передающие станции РНС «Декка» оборудованы аппаратурой высокой степени надежности с применением средств аппаратурного резервирования и допускают работу без обслуживающего персонала в автоматическом режиме. Всё управление и контроль за работой цепи осуществляет обслуживающий персонал пятой станции — станции управления и контроля, на которую, в частности, возлагается задача контроля за излучением станций цепочки, за стабильностью создаваемых изолиний в рабочей зоне системы и передача соответствующих команд управления работой станций цепи.
Для обмена телеметрической информацией между станциями цепи и станцией управления организован отдельный частотный канал па частоте 8,2f («оранжевая» частота) в промежутки времени, когда эта частота не используется для создания так называемых суперзон на разностной частоте 8,2f — 8,0f = 0,2f. Эта вторая ступень устранения многозначности с коэффициентом сопряжения 5 относительно первой используется лишь в воздушной навигации и на временной диаграмме излучения (см. рис. 23.20) частота 8,2f не показана, чтобы не затруднять чтение основной информации.
Мощность излучения береговых станций РНС «Декка» составляет несколько сотен ватт. Передающие антенны имеют диаграмму направленности, обеспечивающую основную часть излучения под малым углом к горизонту в целях уменьшения энергии ионосферного сигнала РНС.
Одно из основных условий функционирования цепи РНС «Декка», как и любой разностно-дальномерной системы, – обеспечение согласованности, синхронизированного излучения станций. Надежная синхронизация излучения ведомых станций колебаниями ведущей должна осуществляться поверхностными сигналами, что возможно при длинах баз до 80 миль.
Такие относительно небольшие базы в свою очередь приводят к незначительным по площади рабочим зонам.
В модернизированных цепочках РНС «Декка» синхронизация излучения передающих станций обеспечивается использованием атомных стандартов частоты на рубидиевой основе с относительной нестабильностью колебаний 1·10-12, что обусловливает возможный суточный дрейф изолиний, не превышающий 0,04 доли точной дорожки по любому их семейству. При этом возможность отказа от непрерывной во времени синхронизации ведомых радиоизлучением ведущей станции позволяет в целях расширения рабочих зон РНС увеличивать базовые расстояния до 100 – 160 миль, корректируя рубидиевые стандарты частоты ведомых станций один раз в сутки – в момент местного полдня, когда воздействие ионосферных волн минимально. Кроме того, применение подобного способа синхронизации колебаний весьма эффективно для цепочек, базовые линии которых проходят по районам с плохими или нестабильными условиями распространения поверхностных радиоволн.
23.6.2. Судовые приёмоиндикаторы РНС «Декка»
Как уже отмечалось выше, в режиме точных фазовых измерений, определяющим формирование точной сетки гипербол, каждая станция цепочки РНС «Декка» — ведущая, красная, зеленая, фиолетовая — излучает одно гармоническое колебание частоты 6f, 8f, 9f и 5f соответственно. В судовом ПИ фирмы «Декка» (рис. 23.21) все четыре одновременно принятых колебания усиливаются в соответствующих частотных каналах и далее с использованием умножителей частоты преобразуются в частоты сравнения Mf, которые в ПИ данного типа выбраны наименьшими общими кратными для частот излучения каждой пары станций (ведущая — одна из ведомых).
Нетрудно убедиться, что частотами сравнения при таком способе их выбора будут частоты: 24f 340 кГц — для красной пары станции, 18f 255 кГц — для зеленой и 30f 425 кГц — для фиолетовой. После образования из принимаемых сигналов колебаний частот сравнения они подаются на фазоизмерительные устройства ФИУ, число которых равно количеству пар станций. Измеренное значение разности фаз индицируется отдельным фазовым индикатором ФИ, окрашенным соответственно в красный, зеленый и фиолетовый цвета.
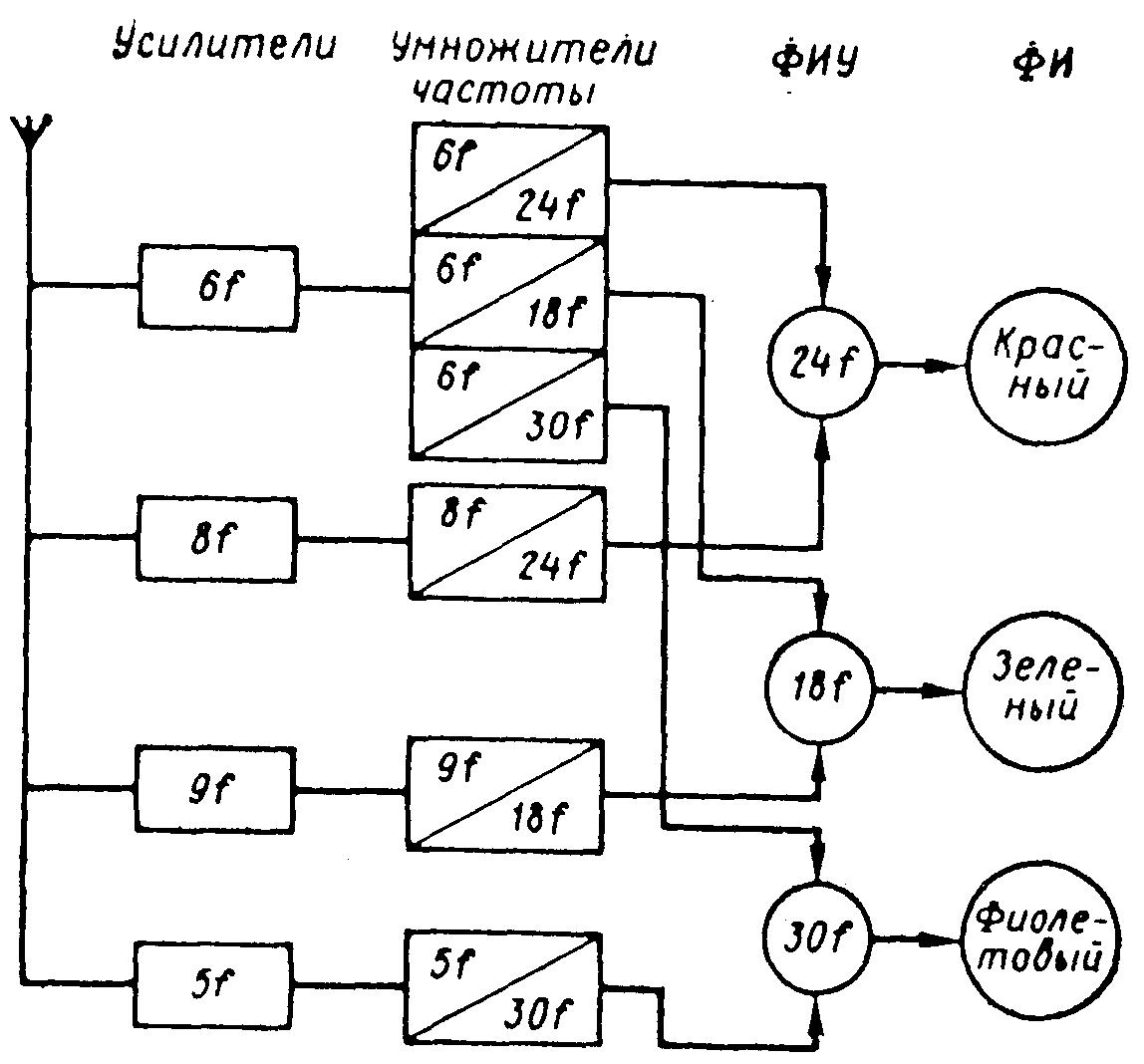
Рис. 23.21. Упрощенная функциональная схема судового приемоиндикатора фирмы «Декка» в режиме точных фазовых измерений
Фазовая структура электромагнитного поля, образующаяся в рабочей зоне системы в результате работы красной пары станций, а также строение красного фазового индикатора представлены на рис.23.22.
Б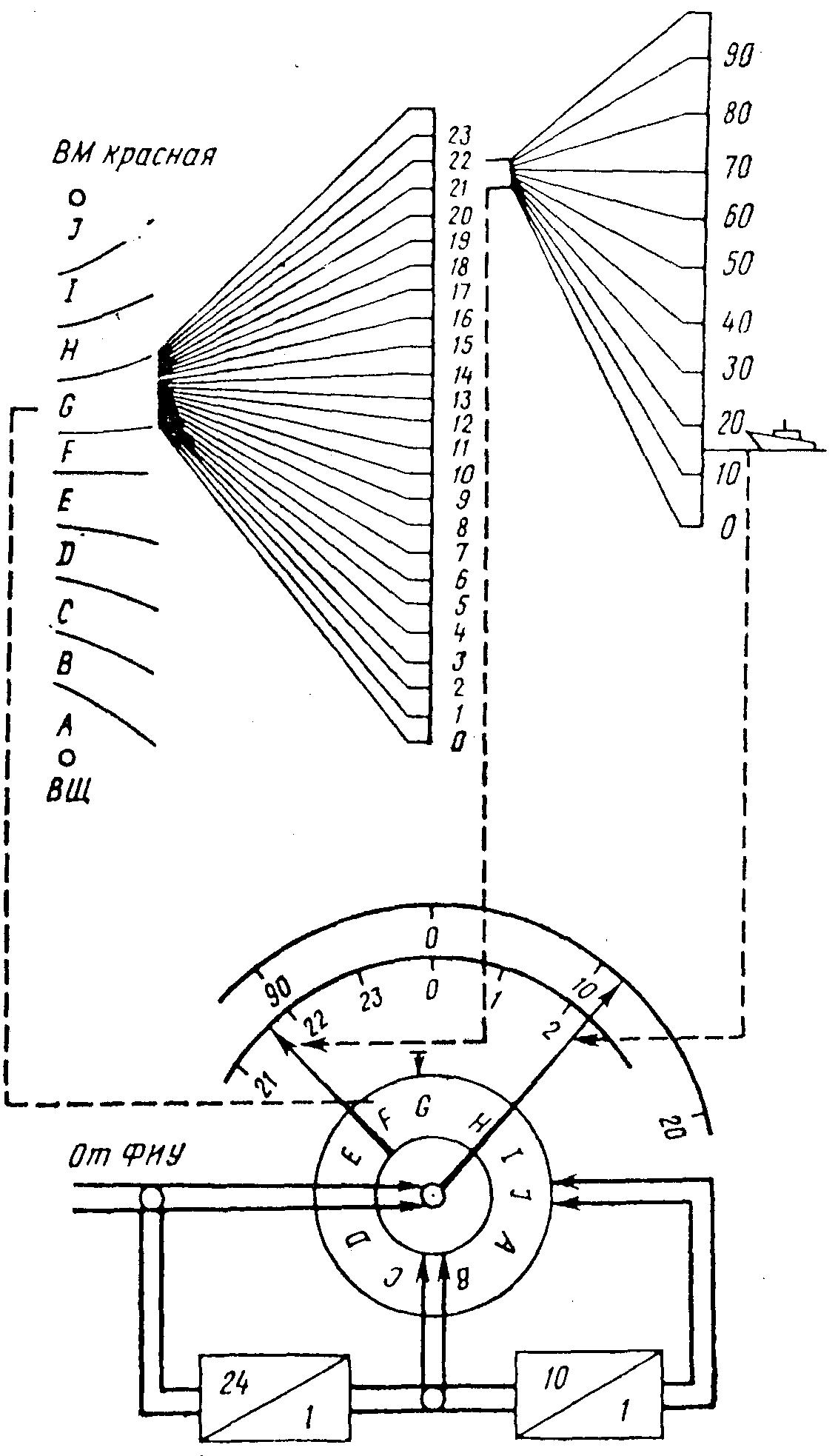 ольшая
стрелка фазового индикатора делает
один оборот при изменении разности фаз
колебаний, приходящих от ведущей и
красной станций, на частоте 24f на
360°, т. е. при перемещении судна на ширину
одной точной дорожки. Цена деле-ния
шкалы—0,01 (1 сантицикл). Если воспользоваться
зависимостью (23.27), то можно показать,
что на выбранных частотах сравнения в
ПИ фирмы «Декка» ширина точной дорожки
на базах станций оказывается равной
около 440, 590 и 350 м соответственно по
каждой паре станции. Причем, естественно,
чем выше частота сравнения, тем ширина
точной дорожки будет меньше.
ольшая
стрелка фазового индикатора делает
один оборот при изменении разности фаз
колебаний, приходящих от ведущей и
красной станций, на частоте 24f на
360°, т. е. при перемещении судна на ширину
одной точной дорожки. Цена деле-ния
шкалы—0,01 (1 сантицикл). Если воспользоваться
зависимостью (23.27), то можно показать,
что на выбранных частотах сравнения в
ПИ фирмы «Декка» ширина точной дорожки
на базах станций оказывается равной
около 440, 590 и 350 м соответственно по
каждой паре станции. Причем, естественно,
чем выше частота сравнения, тем ширина
точной дорожки будет меньше.
М
Рис.
23.22. Фазовая структура радионавигационного
поля красной пары станции и строение
красного
фазового
индикатора
30:1, равными коэффициентам сопряжения грубой и точных семейств дорожек по соответствующим парам станций.
Для исключения ошибок штурмана при снятии отсчетов нумерация точных дорожек различна по каждому фазовому индикатору: красный — 24 дорожки, от 0 до 23-й; зеленый — 18 дорожек, от 30-й до 47-й; фиолетовый—30 дорожек, от 50-й до 79-й. Подобный прием позволяет не записывать цвет фазового индикатора при снятии отсчета РНП.
При пересечении судном грубой дорожки ось малой стрелки совершит полный оборот и, приводя во вращение через редуктор Nз : 1 диск, изменит индицируемый в прорези фазового индикатора номер грубой дорожки. Грубые дорожки в РНС «Декка» называются зонами, имеют буквенные обозначения А, В, С, D, Е, F, G, Н, I, J, т. е. всего 10 зон при измерениях по любой паре станций. Оцифровку зон, точных дорожек и изолиний (гипербол) ведут от ведущей станции к ведомой. Заметим, что так как зоны вне зависимости от цвета ведомой формируются на частоте сравнения 1f, то ширина их одинакова и составляет, в частности, на базовой линии около 10500 м в зависимости от конкретного значения базисной частоты данной цепочки. В некоторых цепочках с увеличенными базовыми расстояниями на них укладываются более 10 зон, тогда индексы зон повторяются в том же порядке.
Таким образом, при непрерывных фазовых измерениях в рассматриваемом режиме работы ПИ все соотношения между гиперболами, дорожками и зонами будут автоматически выдерживаться и соответствовать реальному местоположению судна. При начальном входе в пределы рабочей зоны РНС или после перерыва в работе ПИ отсчет номера гиперболы (сантицикл) установится автоматически, в то время как номер дорожки и зоны может оказаться ошибочным.
В целях устранения многозначности фазовых отсчетов — нахождения номера точной дорожки, в пределах которой находится судно, необходимо проводить фазовые измерения на существенно более низких частотах сравнения, образующих, следовательно, значительно более широкие дорожки. В РНС «Декка» в качестве такой низкой частоты выбрана базисная частота для всех пар станций данной цепочки — 1f, что и определило организацию режима временной селекции в системе при устранении многозначности фазовых отсчетов.
Самый простой, на первый взгляд, путь решения этой проблемы — кратковременный перевод береговых станций цепочки на излучение частоты 1f последовательно во времени неприменим по техническим соображениям. Излучение очень низких частот требует больших габаритов антенных систем, а также энергетически невыгодно. Поэтому было найдено другое решение, а именно: синтезировать частоту 1f уже в бортовых ПИ, выделяя ее тем или иным образом из частот, излучаемых береговыми станциями в режиме устранения многозначности фазовых измерений, но лежащих в рабочем диапазоне частот системы 5f — 9f.
В соответствии с режимом излучения береговых станций МР к бортовому ПИ последовательно в свои кратковременные промежутки времени (0,45 с) приходят с интервалом 2,5 с колебания всех четырех частот 6f, 8f, 9f, 5f, излучаемые каждой из береговых станций в очередности; ведущая — красная — зеленая — фиолетовая. Синтез необходимой частоты 1f из этих колебаний в принципе может быть реализован несколькими методами. Наиболее современный метод, реализующий в полной мере преимущества режима МР с целью увеличения дальности надежного разрежения многозначности фазовых отсчетов, заключается в следующем.
По первому стартстопному сигналу после 10 с излучения береговых станций в режиме формирования точной сетки гипербол в бортовом ПИ осуществляются внутренние коммутации, сводящиеся к преобразованию функциональной схемы (рис. 23.21) в схему, изображенную на рис. 23.23, а также установка электронного коммутатора S, управляемого стартстопными сигналами, в последней в верхнее положение.
ФЗУ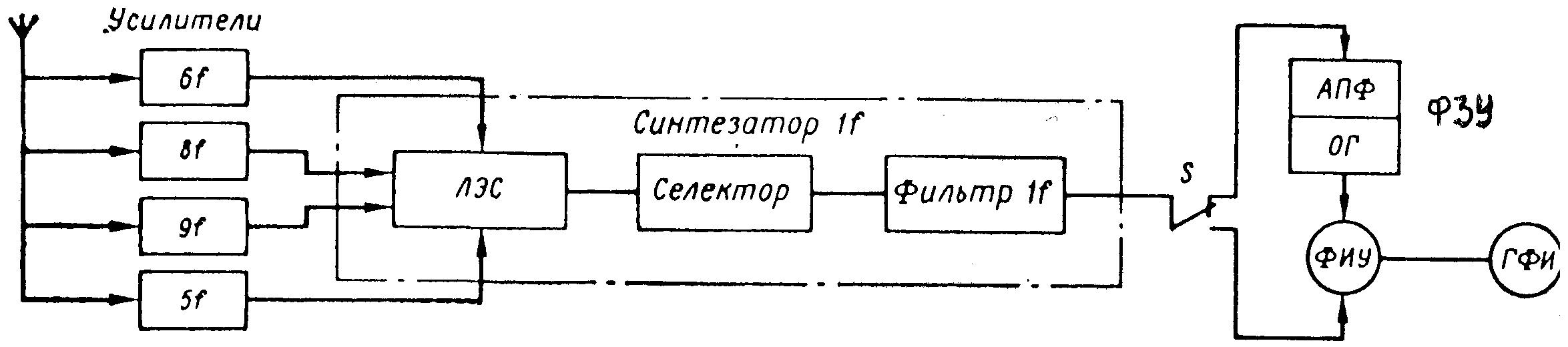
Рис. 23.23. Упрощенная функциональная схема судового приемоиндикатора фирмы «Декка» в режиме устранения многозначности фазовых измерений
Колебания четырех частот, излучаемые после первого стартстопного сигнала ведущей станцией, принимаются, усиливаются и выравниваются по амплитуде в соответствующих усилительных каналах и подаются на синтезатор частоты 1f. Здесь они суммируются в линейном элементе сложения (рис. 23.24). Результирующее сложное колебание имеет явно выраженные главные максимумы пики с периодом следования T=1/1f. Далее это колебание подается на селектор главных пиков, являющийся, по существу, ограничителем колебаний снизу.
Н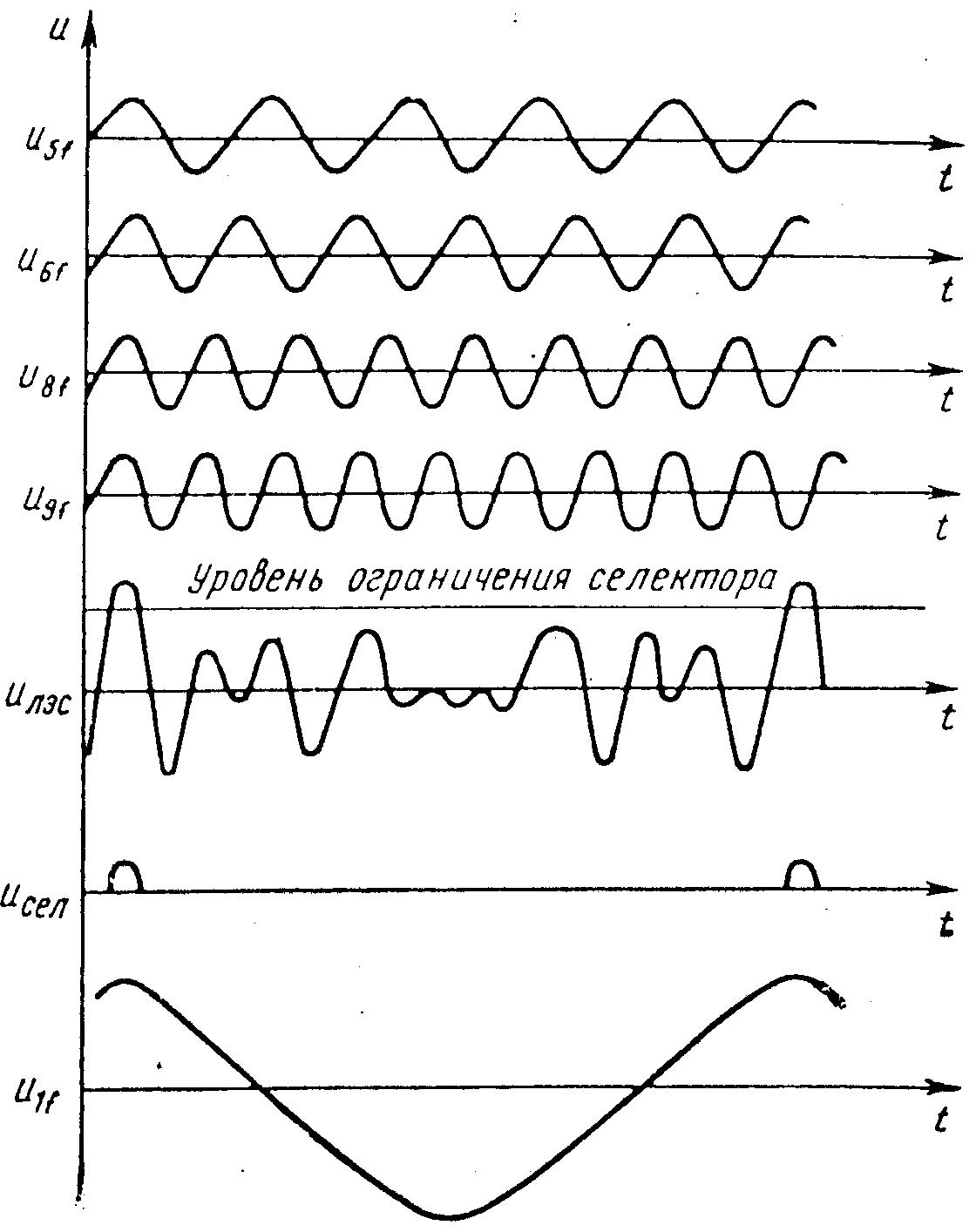 а
выходе селектора вырабатываются
импульсы, соответствующие вершинам
главных максимумов суммарного колеба-ния.
В дальнейшем в фильтре эта импульс-ная
последовательность преобразуется в
незатухающее колебание частоты 1f,
жестко связанное по фазе с фазами
частотных со-ставляющих суммарного
колебания.
а
выходе селектора вырабатываются
импульсы, соответствующие вершинам
главных максимумов суммарного колеба-ния.
В дальнейшем в фильтре эта импульс-ная
последовательность преобразуется в
незатухающее колебание частоты 1f,
жестко связанное по фазе с фазами
частотных со-ставляющих суммарного
колебания.
С
Риc.
23.24. Временные диаграммы, поясняющие
работу синтезатора частоты
После второго, третьего и четвертого стартстопных сигналов электронный коммутатор переключает выход синтезатора частоты 1f непосредственно на ФИУ, на которое, таким образом, последовательно с интервалом 2,5 с поступает колебание 1f, синтезированное из четырех частот, излученных соответственно красной, зеленой и фиолетовой станциями. На другой вход ФИУ непрерывно поступает колебание от ФЗУ, хранящее фазу колебаний 1f ведущей станции. Таким образом, грубый фазовый индикатор ГФИ, начиная с 12,5 с каждого цикла, последовательно с интервалом 2,5 с выдает отсчет, соответствующий доле грубой дорожки (зоны) по красному, зеленому и фиолетовому семействам соответственно. В целях удобства оцифровка шкал ГФИ ведется уже в номерах точных дорожек соответствующих семейств.
Картина фазовой структуры радионавигационного поля в рабочей зоне цепочки для различных моментов времени внутри 20-секундного цикла излучения представлена на рис. 23.25.
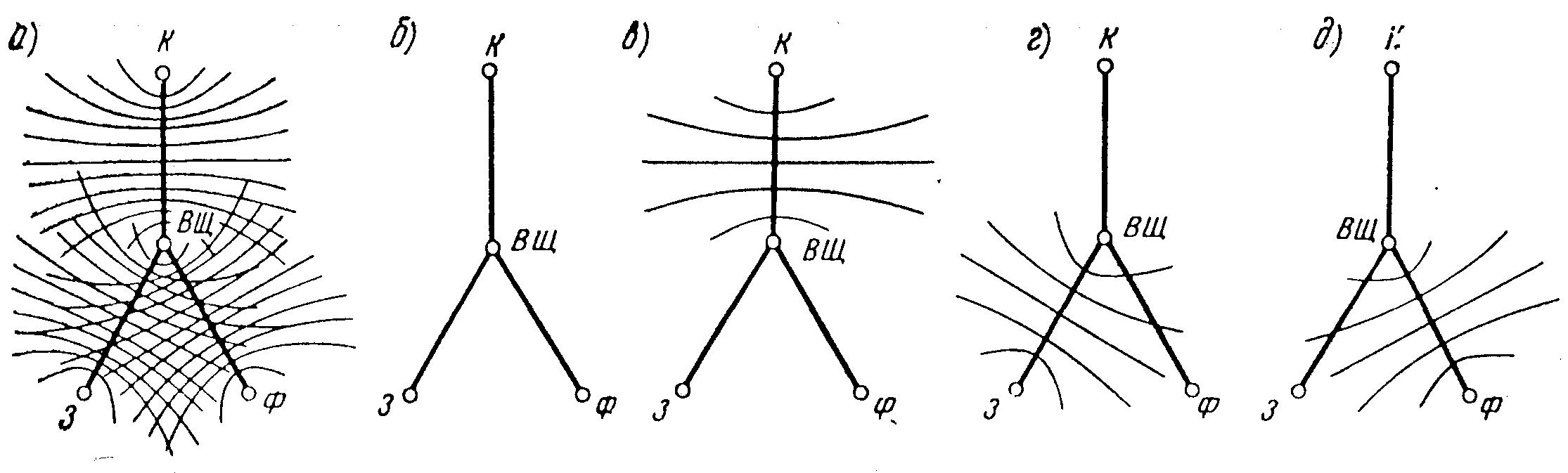
Рис. 23.25. Фазовая структура радионавигационного поля в рабочей зоне цепочки для различных моментов времени в пределах 20-секундного цикла излучения береговых станций:
а – почти постоянно, за исключением случаев б д;
б
–
![]() с;
с;
в
–
![]() с;
с;
г
–
![]() с;
с;
д
–
![]() с.
с.
Рассмотренный способ синтеза базисной частоты 1f не единственно возможный. В частности, в более ранних ПИ РНС «Декка» (например, «Пирс-1Д») для синтеза частоты 1f использовались не 4 колебания, а только 2 из них. В этом случае процесс формирования частоты 1f заключался в выделении разностной частоты в смесителях колебаний в соответствии с алгоритмами: в момент излучения четырех частот ведущей станции 1f=6f—5f, ведомых станций 1f=9f—8f.
Подобный способ не реализует преимущества и возможности режима излучения МР с точки зрения надежности устранения многозначности на больших удалениях от береговых станций в условиях действия ионосферного сигнала.
В соответствии с изложенным очевидно, что РНС «Декка» не позволяет автономно определить номер грубой дорожки (зоны), в пределах которой находится потребитель навигационной информации (судно). Для определения номера зоны необходимо использовать средства счисления либо другие средства навигационных определений, обеспечивающих точность не хуже половины ширины зоны РНС «Декка».
23.6.3. Влияние пространственных радиоволн на точность фазовых
измерений и надежность устранения многозначности в РНС «Декка»
Для диапазона ДВ, используемого в РНС «Декка», слой D ионосферы полупроводящий, что обусловливает значительное поглощение падающей энергии. Отражение радиоволн от него возможно лишь при больших углах падения . В силу этого в дневных условиях пространственные сигналы в РНС «Декка» наблюдаются за пределами объявленной дальности действия системы (около 250 миль) и практически не сказываются на точности определения места. В ночных условиях слой Е хорошо отражает длинноволновые колебания, и пространственные сигналы наблюдаются уже с дистанций порядка 100 миль. В силу непрерывного характера излучения береговых станций поверхностный и пространственный сигналы, интерферируя, приводят к образованию в этом случае радионавигационного поля неустойчивой фазовой структуры.
Девиация фазы результирующего поля относительно фазы поверхностных сигналов, определяющая погрешность в определении места судна, выражается исходя из векторной диаграммы (рис. 23.26) в виде:
![]() (23.30)
(23.30)
г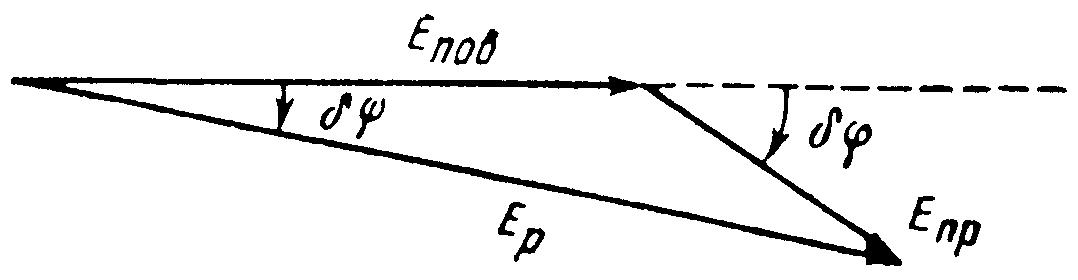 де
q=Eпр
/Епов.
де
q=Eпр
/Епов.
Рис. 23.26. Векторная диаграмма напряженностей пространственных и поверхностных радиоволн
Зависимость (23.30) для q<<1, имеющих место в рабочей зоне РНС «Декка», можно представить следующим образом:
![]() ,
,
где t —время запаздывания пространственной волны.
Случайные вариации высоты h отражающего слоя ионосферы определяют случайный характер величины , принимающей с равной вероятностью значения от 0 до 2.
Вводя новое
обозначение
![]() ,
равное отношению среднего квадратического
значения амплитуды пространственной
волны
,
равное отношению среднего квадратического
значения амплитуды пространственной
волны
![]() за данный интервал наблюдения к амплитуде
поверхностной волны
за данный интервал наблюдения к амплитуде
поверхностной волны
![]() ,
и учитывая, что среднее квадратическое
значение sin
равно
,
и учитывая, что среднее квадратическое
значение sin
равно
![]() ,
среднее квадратическое значение фазы
результирующего поля запишем в виде:
,
среднее квадратическое значение фазы
результирующего поля запишем в виде:
![]() .
.
Влияние пространственных волн сказывается не только на точности измерения РНП, но и на надежности устранения многозначности.
Так, интерференция
поверхностных и пространственных
сигналов приводит к нарушению формы
синтезированного колебания 1f, причем
наиболее опасным, резко понижающим
надежность устранения многозначности
является случай, когда колебания с
частотами 5f и 6f приобретают
дополнительное запаздывание по фазе,
а 8f и 9f —опережение. Главный
максимум результирующего колебания
(см. рис. 23.24) при этом уменьшается, а один
из побочных возрастает и достигает
значения главного при
![]() .
Такое отношение амплитуд пространственных
и поверхностных волн может наблюдаться
в ночных условиях на удалениях около
250 миль от ведущей станции. Это расстояние
от ведущей станции и взято в РНС «Декка»
за официальную дальность действия
системы.
.
Такое отношение амплитуд пространственных
и поверхностных волн может наблюдаться
в ночных условиях на удалениях около
250 миль от ведущей станции. Это расстояние
от ведущей станции и взято в РНС «Декка»
за официальную дальность действия
системы.
23.6.4. Функциональное построение приёмоиндикаторов РНС «Декка»
В настоящее время на судах морского флота для определения местоположения по сигналам береговых станций РНС «Декка» используется ПИ «Пирс-1M». Принцип действия ПИ поясняет функциональная схема, приведенная на рис. 23.27.
Особенностью ПИ «Пирс-1M» является то, что частотами сравнения в нем выбраны, в отличие от аппаратуры фирмы «Декка», частоты излучения nf ведомых станций. Нетрудно заметить, что переход на более низкие частоты сравнения приводит в этом случае к более широким дорожкам, получаемым при выполнении точных фазовых измерений. Эти дорожки получили название «промежуточных» и имеют коэффициент сопряжения по отношению к точным, формируемым в английских ПИ фирмы «Декка», на частотах Mf: красная пара — 3, зеленая — 2, фиолетовая — 6. Ширина промежуточных дорожек на базе составляет соответственно около 1320, 1180, 2100 м. Оцифровка границ промежуточных дорожек на точных фазовых индикаторах «Пирс-1M» выполнена большими цифрами. Надежность опознавания таких более широких дорожек при реализации в условиях устранения многозначности грубых фазовых измерений выше, чем в ПИ с частотами сравнения Mf. В то же время данное техническое решение привело к некоторому усложнению схемы ПИ «Пирс-1M»: появление второй ступени устранения многозначности, необходимость использования более прецизионных фазоизмерительных схем в каналах точных фазoвыx измерений для сохранения их необходимой точности.
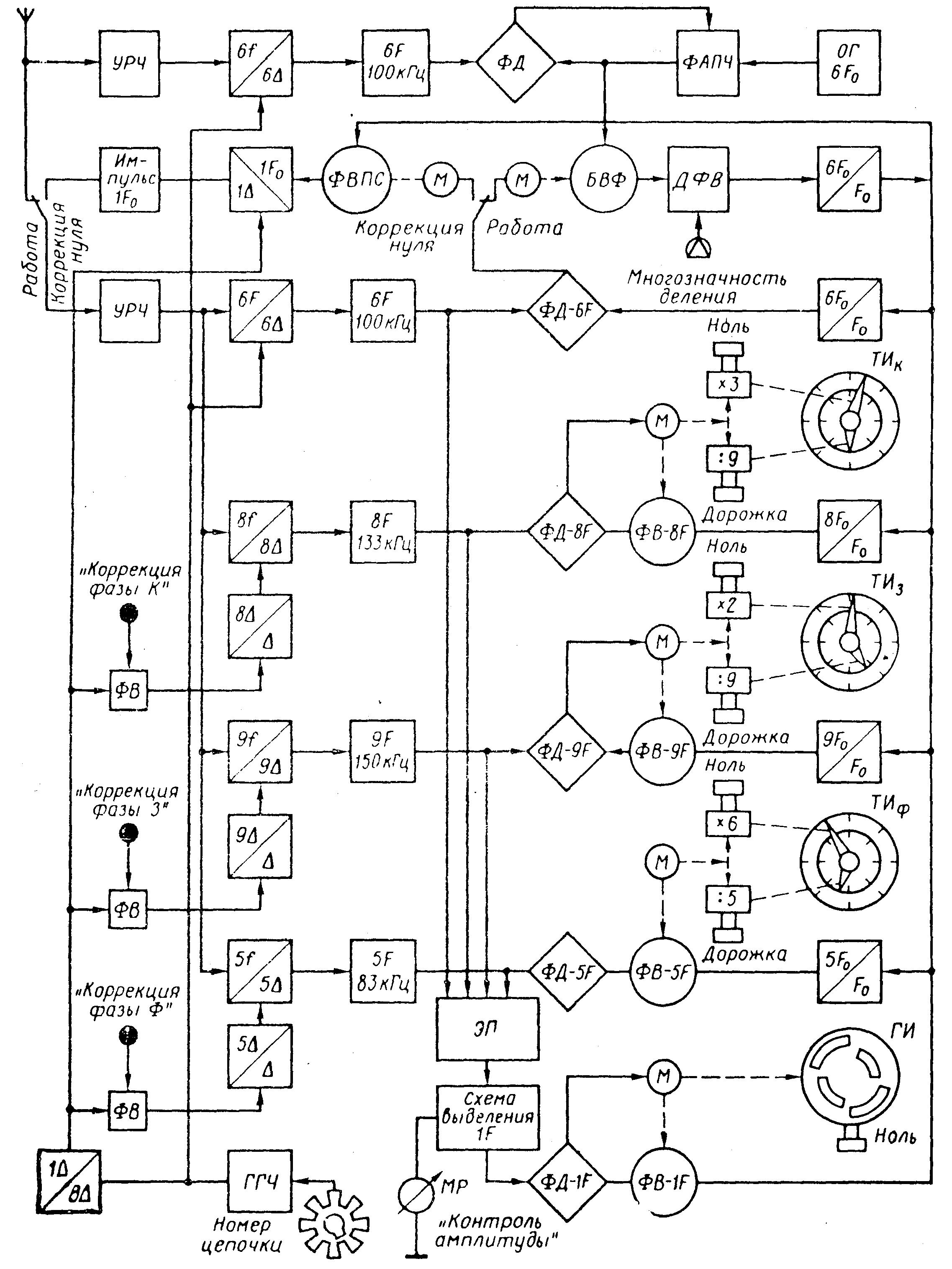
Рис. 23.27. Функциональная схема приёмоиндикатора «Пирс-1M»
Синхронизация ПИ, прием и усиление сигналов. Приёмник «Пирс-1M» включает в себя 4 основных узкополосных канала усиления и преобразования колебаний, один дополнительный канал синхронизации и выполнен по супергетеродинной схеме. Наличие специального канала синхронизации для подстройки с помощью системы фазовой автоподстройки частоты ФАПЧ колебаний опорного генератора ОГ под частоту и фазу сигнала ведущей станции в целях создания его стабильной копии — эффективное средство помехозащиты ПИ.
Генератор гетеродинных частот ГГЧ вырабатывает частоту 6Δ, номинальное значение которой определяется положением регулятора «Номер цепочки». Колебания 6Δ далее непосредственно используются для преобразования частоты в смесителях основного и дополнительного каналов частоты 6f, а в каналах ведомых станций преобразуются соответственно в колебания 8Δ, 9Δ, 5Δ.
В результате смешивания колебаний 6f, 8f, 9f, 5f поступающих с антенны, с колебаниями блока гетеродинных частот 6Δ, 8Δ, 9Δ, 5Δ в смесителях образуются колебания с частотами 6F, 8F, 9F, 5F, которые остаются неизменными при работе по любой цепочке РНС «Декка». Заметим, что процесс преобразования частоты, описанный в предыдущих подразделах, не сказывается на результатах последующих фазовых измерений, что и будет использовано в дальнейшем при описании работы прибора. Полученные таким образом колебания 6F, 8F, 9F, 5F после усиления в усилителях УПЧ поступают далее на фазовые дискриминаторы для производства фазовых измерений.
Режим точных фазовых измерений. Предполагая первоначально, что приёмные тракты не вносят фазовых искажений, колебания на выходах соответствующих УПЧ можно записать в виде:
![]() (23.31)
(23.31)
![]() (23.32)
(23.32)
где Dm – расстояние от ведущей станции до судна;
vф — фазовая скорость распространения радиоволн;
n = 8, 9, 5 в зависимости от «цвета» станции;
Dn – расстояние от соответствующей ведомой станции до судна.
С другой стороны, после окончания отработки системы ФАПЧ канала синхронизации на ее выходе вырабатываются колебания, синфазные с колебаниями ведущей станции, но в гораздо меньшей степени подверженные воздействию случайных помех. Эти колебания поступают через блок ведущего фазовращателя БВФ, дискретный фазовращатель ДФВ на делитель частоты на 6.
Процесс деления частоты колебаний сопровождается появлением многозначности фазы получаемых колебаний, так как он может начаться с любого периода делимого колебания (рис. 23.28).
Возможная дискретность в начальной фазе выходного колебания делителя составляет, очевидно, 2 / k, где k —коэффициент деления.
Тогда на выходе делителя частоты на 6 колебания можно записать в виде:
 (23.33)
(23.33)
где x — неизвестное случайное целое число, лежащее в пределах от 0 до 5.
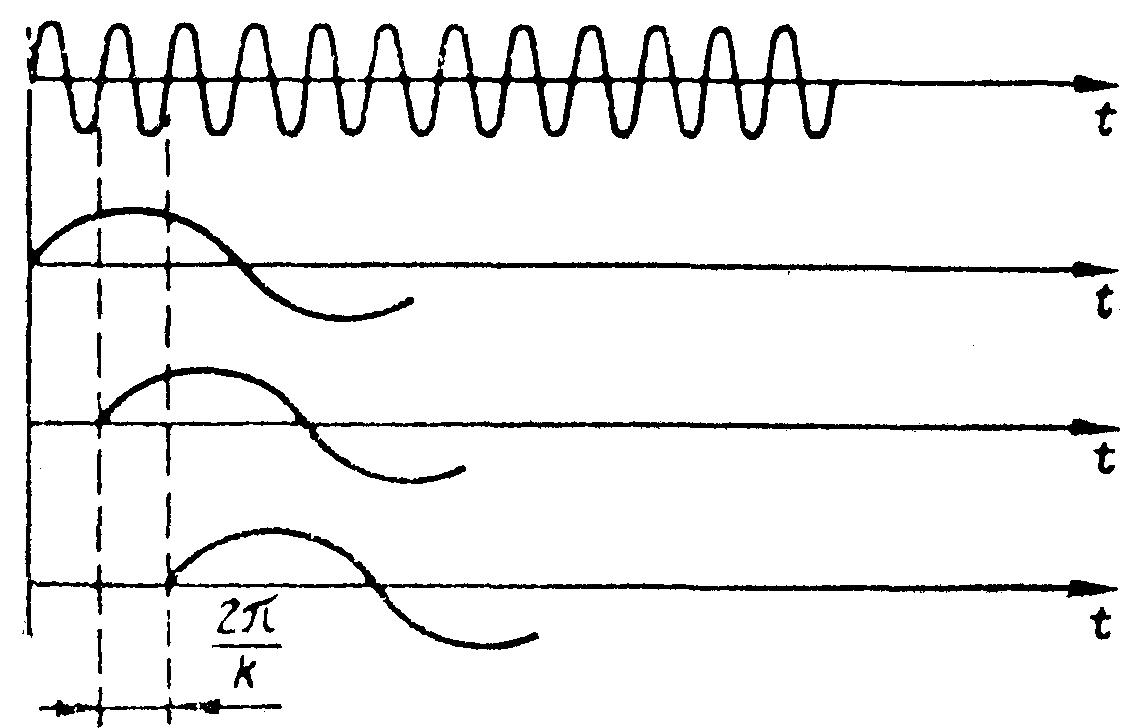
Рис. 23.28. Временные диаграммы, поясняющие появление многозначности фазы колебаний в процессе деления частоты
Далее колебание (23.33) приводится к частотам ведомых станций в соответствующих умножителях частоты:
 (23.34)
(23.34)
На фазовом дискриминаторе ФД-6F (см. рис. 23.27) колебания частоты 6F, получаемые на выходе умножителя, сравниваются по фазе с колебаниями 6F, получаемыми на выходе основного приемного канала 6F. В режиме «Работа» сигнал рассогласования с выхода ФД-6F посредством исполнительного двигателя М изменяет фазу выходного напряжения БВФ до тех пор, пока фазы этих колебаний не сравняются.
Колебания [формула (23.32)] с выходов каналов приема сигналов ведомых станций и колебания [формула (23.34)] с выходов умножителей частоты поступают на фазоизмерительные схемы каналов, в состав которых входят ФД-nF, ФВ-nF и М. Роторы фазовращателей ФВ-nF в результате отработают разность фаз сравниваемых колебаний:
![]() (23.35)
(23.35)
Для приведения показаний фазометров к отсчетам, соответствующим оцифровке гипербол на издаваемых картах РНС «Декка», углы отработки фазовращателей с помощью повышающих редукторов умножаются на М/п. В этом случае большие стрелки точных индикаторов ТИ отработают углы:
![]() (23.36)
(23.36)
Первое слагаемое в выражении (23.36) указывает долю точной дорожки в системе отсчетов РНС «Декка». Второе слагаемое в силу того, что число М кратно 6, определяет только полные обороты больших стрелок и не создает многозначности их угловых положений при любом значении числа х.
Для подсчета номеров точных дорожек ТИ имеются малые стрелки, которые связаны с роторами ФВ-nF через замедляющие редукторы с коэффициентом редукции 1/п. Замедление вращения стрелок эквивалентно процессу деления частоты и сопровождается появлением дополнительной многозначности их угловых положений:
![]() (23.37)
(23.37)
где п = 0, ..., n-1 — целое неизвестное число.
Выражение (23.37),
учитывая, что
![]() ,
можно привести к виду:
,
можно привести к виду:
![]() (23.38)
(23.38)
Первое слагаемое в формуле (23.38) определяет отсчет доли грубой дорожки (зоны) РНС «Декка», приведенный к искомому номеру точной дорожки, второе —дискретную М-значность малых стрелок, которую необходимо устранить.
С осью малой стрелки через замедляющий редуктор 1:10 (на функциональной схеме не показан) связана вращающаяся шкала ТИ с указанием букв зон (от А до J).
Режим устранения многозначности фазовых отсчетов. В ПИ «Пирс-1M» для формирования базисной частоты 1F, на которой ведутся грубые фазовые измерения в режиме устранения многозначности, используется метод синтеза ее из колебаний четырех частот данной цепочки в соответствии с процедурой, описанной ранее. При этом устранение многозначности осуществляется в две ступени: первая ступень—приведение числа х [см. формулу (23.37)] к нулю. В соответствии с диаграммой излучения станций (см. рис. 23.29) после первого стартстопного сигнала кратковременно выключаются из работы точные фазометры и включается грубый. Колебания четырех частот 5F, 6F, 8F, 9F, принимаемые от ведущей станции, поступают на синтезатор частоты 1F, на выходе которого формируется колебание:
![]() (23.39)
(23.39)
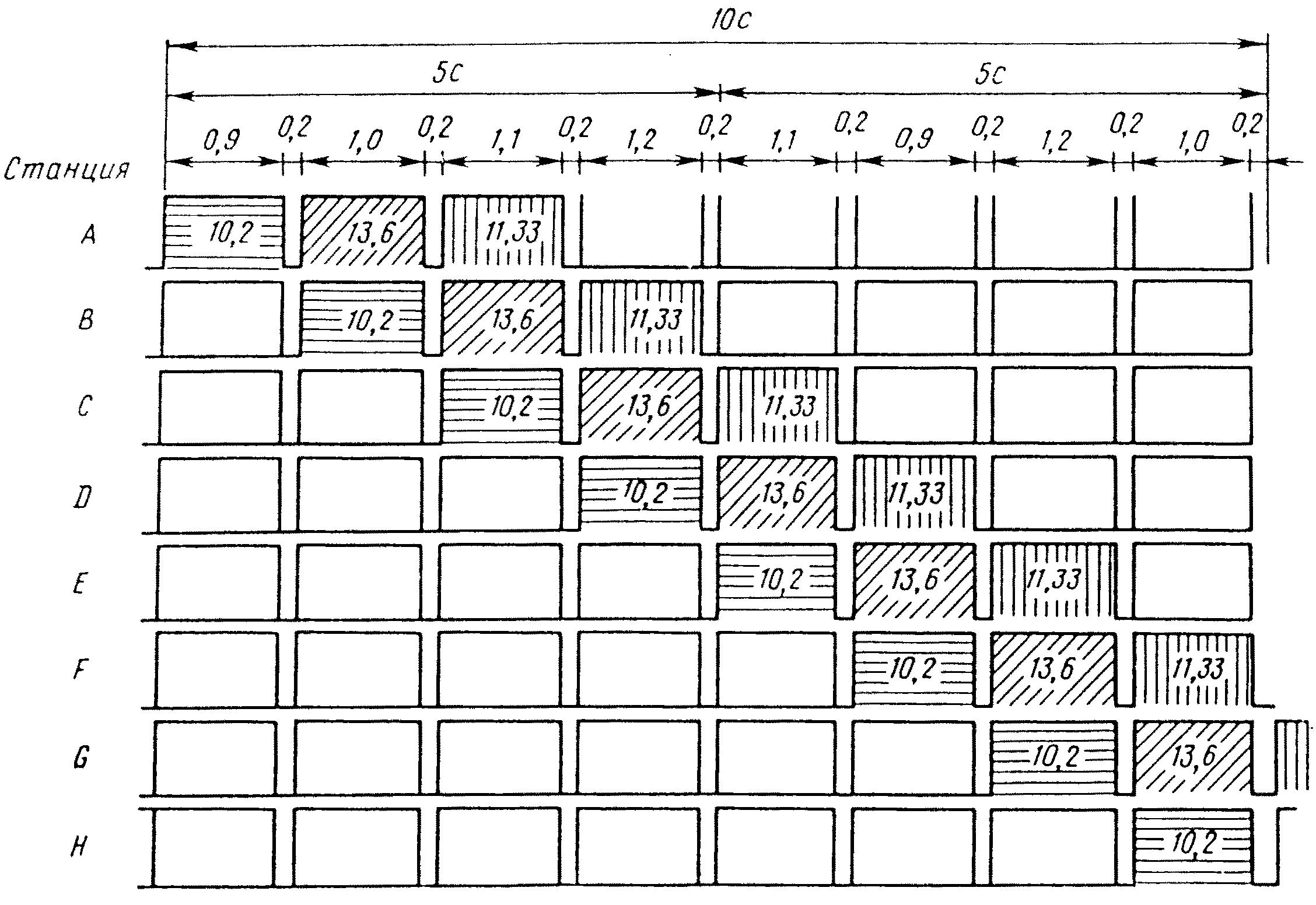
Рис. 23.29 Временная диаграмма излучения береговых станций
Это колебание подается на один из входов ФД-1F, на второй вход которого поступает колебание [формула (23.33)] с выхода делителя на 6. Очевидно, что ротор ФВ-1F в результате повернется на угол, равный разности фаз сравниваемых колебаний:
![]() .
.
Секторная (белая) шкала ГИ оцифрована в числах х. Поворотом шестипозиционного регулятора «Многозначность деления», с каждым переключением которого ДФВ изменяет фазу выходного колебания 1F на 60°, добиваются показаний Х=0 белой секторной шкалы ГИ.
Таким образом, в результате первой ступени устранения многозначности определяется точная дорожка в пределах одной из п (пока неизвестной) промежуточной дорожки. Вторая ступень устранения многозначности, заключающаяся в приведении числа уп к нулю, осуществляется по последующим трем стартстопным сигналам ведущей станции, которые упреждают одновременное излучение четырех частот красной, зеленой и фиолетовой станциями.
В этом случае на ФД-1F последовательно с интервалом 2,5 с сравниваются по фазе колебания:
![]() (23.40)
(23.40)
и колебания, определяемое выражением (23.33). Ротор ФВ-1F и связанный с ним ГИ последовательно отработают углы (при х=0):
![]() (23.41)
(23.41)
Сравнивая показания малых стрелок ТИ и соответствующих шкал ГИ, определяемых соответственно выражениями (23.37) и (23.41), получим
![]()
Регуляторами «Дорожка» каждого ТИ устраняют различия в показаниях малых стрелок ТИ и ГИ, тем самым число уn сводится к нулю.
Выполнение второй ступени устранения многозначности эквивалентно нахождению номера промежуточной дорожки.
Режим «коррекция нулей» При анализе работы ПИ в режиме точных фазовых измерений и устранения многозначности предполагалось, что приёмоизмерительные тракты прибора не вносят дополнительных фазовых сдвигов и, следовательно, не приводят к дополнительным инструментальным погрешностям. В действительности эти фазовые искажения в процессе усиления и преобразования сигналов существуют. Принцип их исключения — компенсация, что достигается выравниванием дополнительных фазовых сдвигов в колебаниях различных частот, преобразованных в частоты сравнения.
Режим «коррекция нулей» по существу калибровочный и должен предшествовать рабочим режимам ПИ. При реализации этого режима на вход частотных каналов подаются контрольные колебания, жестко взаимосвязанные по фазе между собой. Эти колебания формируются во входных резонансных цепях каналов приема как соответствующие гармонические составляющие из импульсов малой длительности с частотой следования, равной базисной частоте 1f. Для этого засинхронизированные колебания ОГ (см. рис. 23.27) с выхода делителя частоты на 6 через фазовращатель пилот-сигнала ФВПС, смеситель поступают на формирователь импульсов, содержащих в своем спектре гармонические составляющие 6f и nf с достаточными амплитудами.
В режиме «коррекция нулей» после отработки следящей системы пилот- сигнала последний на выходе ФВПС оказывается подстроенным по фазе под сигналы ОГ. Таким образом, на фазоизмерительные устройства поступают с одной стороны колебания ОГ, приведенные к частотам сравнения, и с другой стороны – колебания, сформированные из пилот-сигнала, подстроенного предварительно по фазе под колебания ОГ. Если фазометры покажут разность фаз между этими колебаниями, необходимо регуляторами «Нуль» фазометров их скомпенсировать.
Поскольку «коррекция нулей» грубого фазометра осуществляется по сигналу синтезатора частоты 1F, то перед коррекцией нулей предварительно выполняется фазирование входных напряжений синтезатора, обеспечивающее максимальную амплитуду сигнала частоты 1F на его выходе, что индицируется по соответствующим показаниям стрелочного прибора «Контроль амплитуды». Данное фазирование осуществляется изменением в небольших пределах фазы гетеродинных частот посредством потенциометров «коррекция фазы».
В режиме «коррекция нулей» роторы ФВ-nF должны быть установлены в одно из уп устойчивых положений, что практически выполняется выставкой малых стрелок ТИ на большие цифры, соответствующие границам промежуточных дорожек.
В последние годы находятся в эксплуатации приёмоиндикаторы РНС «Декка» нового поколения. Особенность их — широкое использование современной элементной базы: аналоговых и цифровых микросхем, а также дискретных (цифровых) методов обработки сигналов. Как следствие этого, например, в приемоиндикаторе «Дельфин-А» полностью отсутствуют механические элементы: электромеханические фазовращатели, механические индикаторы, редукторы, муфты и т. п. Расширены функциональные возможности прибора — режимы «коррекции нулей» и устранения многозначности выполняются автоматически.
Основные принципы функционального построения приемоиндикатора остались неизменными.
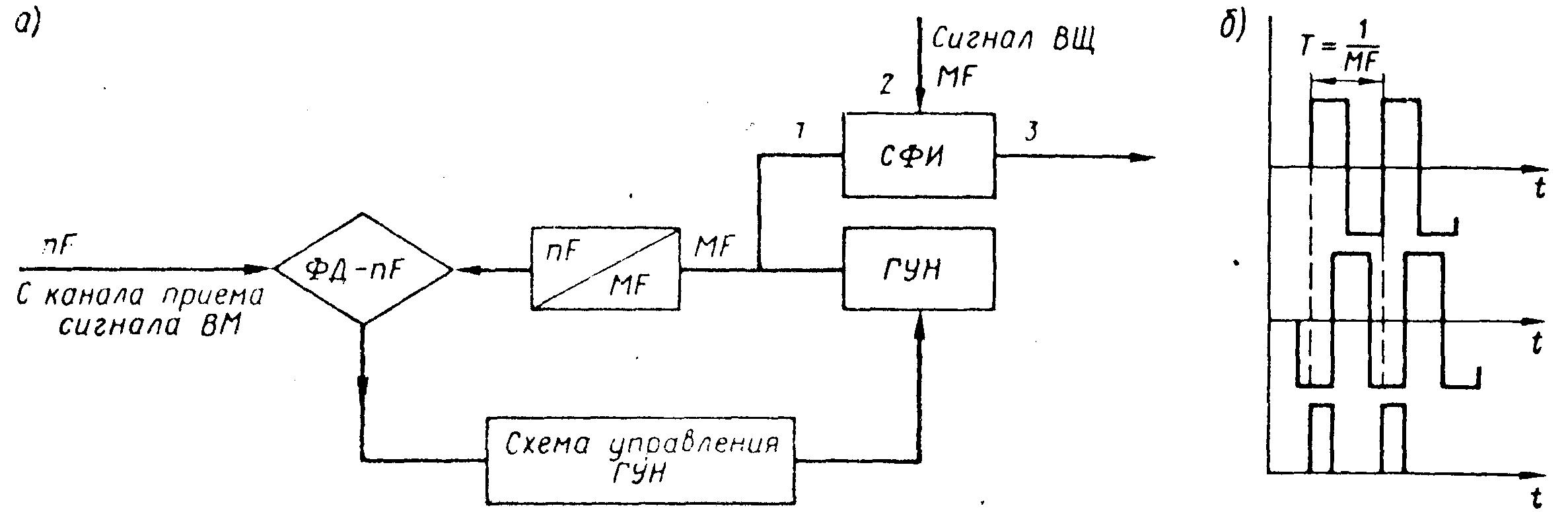
Рис. 23.30. К принципу действия фазоизмерительного канала приемоиндикатора «Дельфин-А»
Принцип действия одного из фазоизмерительных каналов приемоиндикатора «Дельфин-А», выполненного на основе ФАПЧ с делением частоты генератора, управляемого напряжением ГУН, поясняет рис. 23.30, а. Схема формирования импульсов СФИ при подаче на нее колебаний ведущей станции, приведенных на частоте сравнения MF, и колебаний MF ведомой станции вырабатывает импульсы, длительность которых пропорциональна разности фаз сравниваемых колебаний (рис. 3.30, б). Далее эти импульсы поступают на соответствующие схемы цифровой индикации радионавигационного параметра.