

44. Етапи вторинної обробки радіолокаційної інформації.
Етапи:
а) виявлення трас цілей (ухвалення рішення про наявність трас);
б) супровід трас цілей, що складається з регулярного обчислення й уточнення їхніх параметрів.
Процес вторинної обробки складається в результаті послідовного виконання наступних операцій:
виявлення трас цілей;
супровід і оцінка параметрів траєкторії.
Виявлення траси в процесі вторинної обробки може здійснюватися візуально (оператором) або автоматично (обчислювальним пристроєм).
Автоматичне виявлення траси називають автозахопленням. Для з'ясування фізичної суті операцій вторинної обробки розглянемо один з можливих способів автозахоплення траси цілі за даними двокоординатної оглядової РЛС (рис.1).
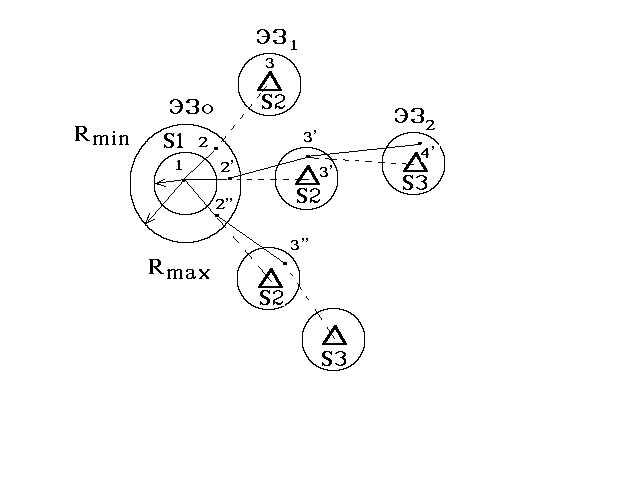
Рис.1. Варіант способу автозахоплення траси цілі за даними двокоординатної оглядової РЛС
Операція обчислення координат мети в подальших циклах огляду називається екстраполяцією координат, а точка простору, відповідна розрахунковим значенням координат целі - екстраполірованою точкою (ЕТ).
Операцію порівняння відміток, що потрапили в строб, називають звіренням або селекцією.
Після відбору в стробі однієї «істинної» відмітки необхідно уточнити (згладити) координати відмітки і обчислити параметри траси.
Разом із задачами виявлення, супроводу цілей і видачі споживачам згладжених значень координат і параметрів трас в процесі вторинної обробки може здійснюватися прогнозування (пролонгація) координат цілей.
В процесі автосупроводу кожної цілі розв'язуються наступні задачі:
1. Визначення (оцінка) згладжених параметрів траси цілі (координати, курс, швидкість, прискорення і т.д.);
2. Екстраполяція параметрів траси на один або декілька оглядів;
3. Виділення області, в якій з певною вірогідністю очікується поява відмітки в новому огляді (стробує);
4. Звірення параметрів екстрапольованої точки з параметрами відміток, що потрапили в строб, і вибір однієї з них для продовження траси (селекція відміток в стробі).